

keymlinux
-
Compteur de contenus
725 -
Inscription
-
Dernière visite
-
Jours gagnés
3
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par keymlinux
-
-
Il y a 5 heures, Celebrinnar a dit :
Petite question, toutes les photos que tu présentes là sont sans le filtre astrosolar ?
Bonjour,
Tout a fait, aucun filtre ici, juste l'APN et l'objectif, ces photos sont toutes faites entre 30s avant la phase de totalité et 30s après, ce qui permet d'avoir l'effet "Diamond ring". Et cela permet aussi d'avoir de la couleur alors qu'avec le filtre tout est gris.
J'ai aussi fait des photos des phases partielles croissantes et décroissantes, avec filtre astro solar (1 photo pour chaque variation de 1% de la progression). Cela me permettra de faire une animation video et on montage façon "chapelet" que je viendrais poster plus tard...
Cordialement
-
 1
1
-
 1
1
-
-
Merci a tous pour vos encouragements.
J'ai posté de nouvelles images dans le post initial ci dessus, et j'ai mis les quelques informations (horodatage et paramètres d'exposition)
A bientôt, Cordialement, Stéphane
-
- C’est un message populaire.
- C’est un message populaire.
Bonjour,
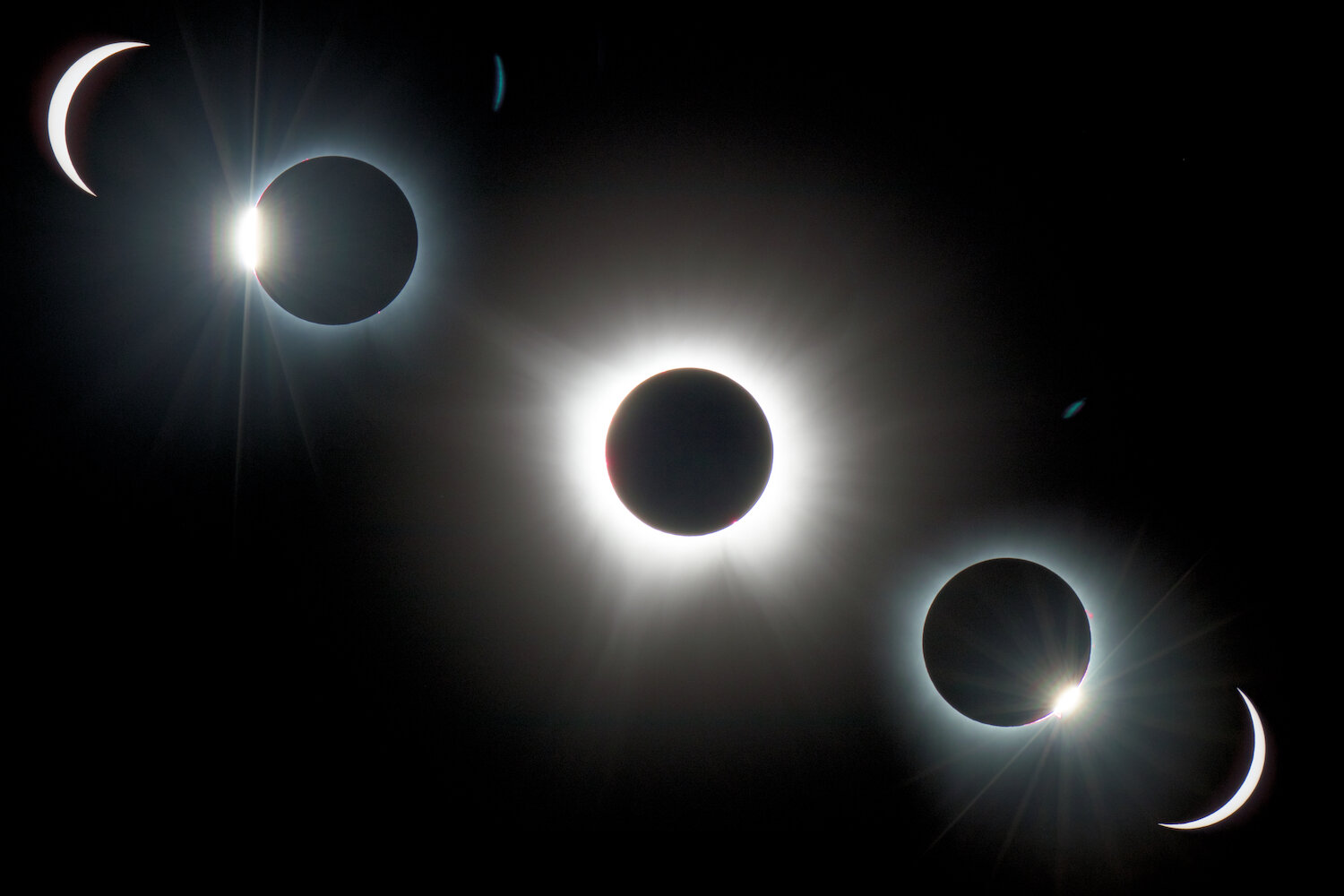
Pour faire dans l'originalité en ce jour d'éclipse solaire totale, je viens ici vous poster quelques photographies
Après un vol Paris-Houston, j'avais prévu (plan A) de me rendre a Uvalde à environ 500km à l'ouest de Houston.
Au vu de la météo au Texas, le plan A a été abandonné et un plan B trouvé à l'arrache par un copain du club, à savoir Conway dans l'Arkansas, à 700 km de Houston
Après un long trajet de nuit et en commençant la journée avec un gros deficit de sommeil, la meteo sur Conway est bonne, un léger voile de haute altitude, qui s'est montré très discret, se dissipant un peu avant la totalité.
Le matériel:
APN Canon 80D, objectif 70-300 utilisé à 300mm, filtre astro solar pour les phases partielles, suivi motorisé avec une StarAdventurer sur trépied photo léger.
En vrac, sans traitement (autre que la conversion RAW vers JPEG et la reduction de 600x4000 à 1500x1000 pour réduire le poids des images)
Vous noterez un gros lens flare (arc bleuté) sur certaines photos
EDIT: ajout des informations sur l'heure de prise de vue et sur les paramètres d'exposition
EDIT: ajout en fin de post de 3 nouvelles photos dont une avec détails sur les éruptions
EDIT 2: ajout d'une animation video en fin de post
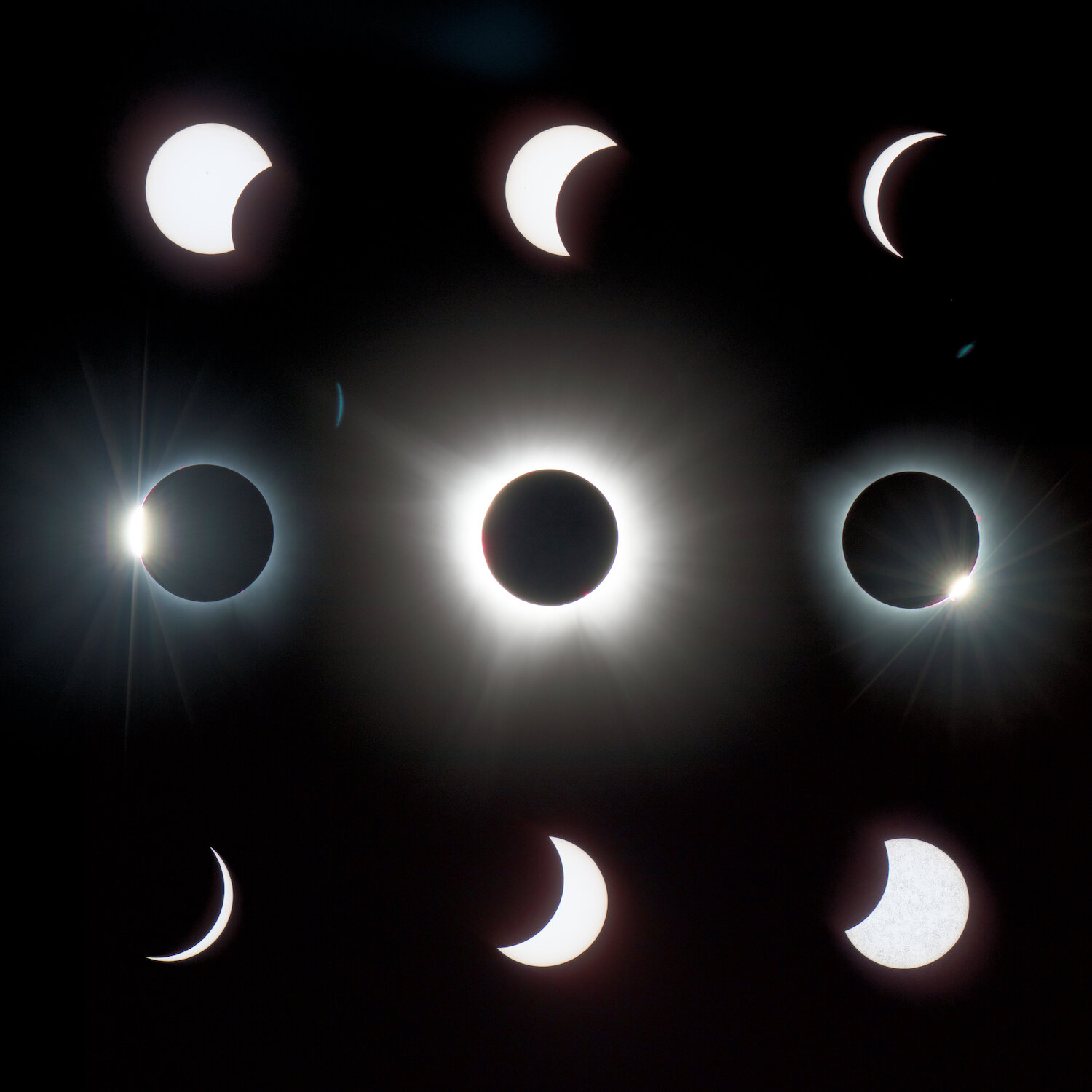
EDIT 3: 20/04/2024: ajout de montages avec les différentes étapes de l'éclipse en fin de post
UTC 18:50:56 ISO100, f/16, 1/100s

UTC 18:51:04 ISO100, f/11, 1/25s
UTC 18:51:05 ISO100, f/16, 1/400s
UTC 18:51:08 ISO 100, f/8, 1/1600s
UTC 18:51:28 ISO400, f/16, 1/2s
UTC 18:53:10 ISO100, f/8, 1/15s
UTC 18:54:40 ISO100, f/16, 1/4s
UTC 18:54:44 ISO100, f16, 1/250s
UTC 18:55:07 ISO100, f/16, 1/100s
Une dernière photo, avec traitement, composition HDR de 6 poses allant de 1/250s à 1/2s
Il y en a d'autres, mais cela attendra mon retour en France, maintenant les vacances commencent, je vais pouvoir rattraper le sommeil en retard...
EDIT: ajout de 3 nouvelles photos dont une avec détails sur les éruptions
UTC 18:51:01 ISO100, f/16, 1/200s
@roger15 désolé pour le premier diamant, je n'ai pas mieux que celle ci dessous, il aurait fallu en prendre une autre (avec la même exposition) juste après, sauf que celles que j'ai prises après je visais les grains de Baily...
UTC 18:54:58 ISO100, f8, 1/1000s
crop de l'image ci dessus pour le détail des protubérances
EDIT2: ajout d'une petite animation format GIF
Attention: les proportions des durées de chaque phase ne sont pas respectées:
- Ici on a 50 images pour chacune des phases partielles croissantes et décroissantes, et 25 images pour la totalité (donc la totalité semble faire 20% de la durée de l'animation).
- Dans la réalité, chacune des phase partielle durait plus d'une heure et la phase de totalité seulement 3min56sec sur mon lieu d'observation (donc pas du tout 20% de l'observation totale)
La video est un peu grosse, désolé pour ceux qui ont un faible débit internet.
EDIT 3: quelques montages
Bon ciel a tous, cordialement, Stéphane
-
13
-
25
-
Il y a 23 heures, Gaby70000 a dit :
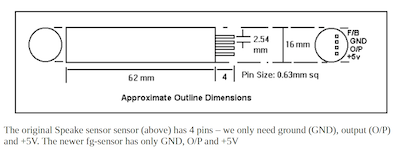
le problème c'est que je ne comprends pas bien les connectiques du FGM 3+
Bonjour,
De ce que j'ai lu...
- les anciens capteurs FGM3+ ont 3 connecteurs F/B, GND, O/P et +5V, les nouveaux n'ont que 3 connecteurs, le F/B disparait
Pour les connections:
- connecter le GND du capteur FGM3+ sur le GND de l'arduino uno
- connecter le +5V du capteur sur le +5V de l'arduino
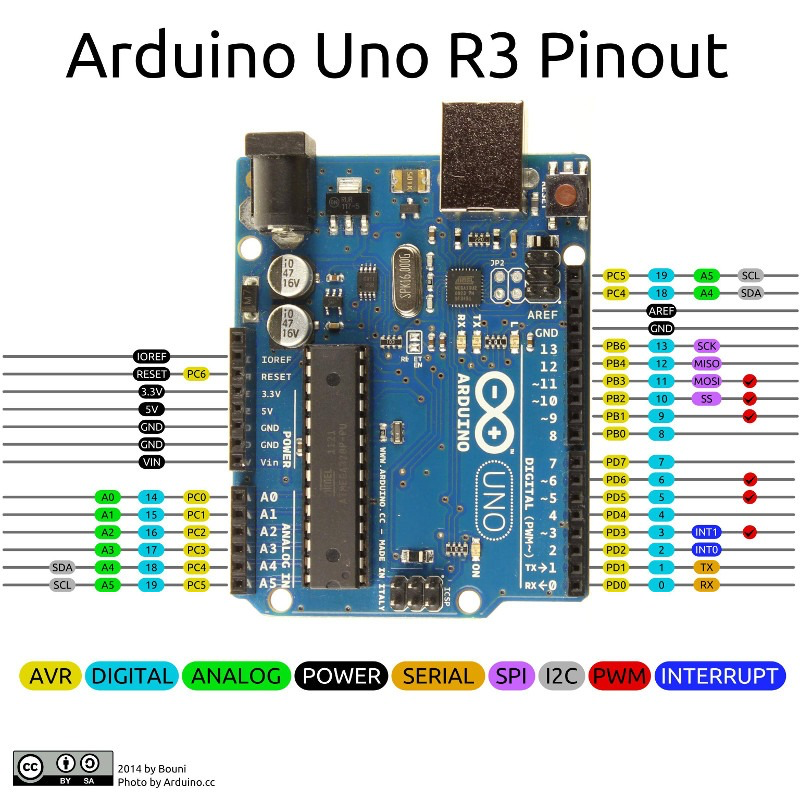
- connecter le O/P du capteur sur le PIN 5 de l'arduino uno (tu as le droit de demander pourquoi le numéro 5 🙂 )
Le pinout de l'arduino Uno R3
La question est "pourquoi le PIN5 ?" c'est marqué nulle part dans la doc du projet
Effectivement c'est marqué nulle part dans la doc de ce projet, mais le code arduino fourni montre qu'il utilise la librairie "FreqCount", reste donc à regarder la doc de cette librairie pour connaitre le port qu'elle mesure...
doc ici: https://www.pjrc.com/teensy/td_libs_FreqCount.html
Dans le tableau des connecteurs à utiliser, on voit que pour un arduino uno c'est le pin 5
Donc l'arduino mesure la fréquence sur son PIN5, et écrit la fréquence sur le port série, qui est connecté au raspberry pi
Sur le raspberry pi, un programme en python lit le port série, garde un historique des valeurs lues et trace des graphes
Cordialement, Stéphane
-
Bonsoir,
Plutôt que d'utiliser un bandeau a LED, avec les problèmes que vous avez noté pour réduire le flux lumineux (avec risque de créer un effet de "variation" et d'apparition de bandes...), moi j'ai opté pour un panneau electroluminescent.
La luminosité est plus faible qu'un bandeau LED (pas besoin de réduire le flux), mais cela peut être un problème pour faire des flats avec des filtres sélectifs, cela augmente beaucoup le temps de pose (on peut alors avoir des flats de 3 secondes).
Exemple ici pour le panneau a flat pour mon C8
J'en ai aussi fait une version plus petite (diamètre 11cm) pour une lunette ED80, et avec une motorisation pour avoir un flip-flap (permet de faire les flat et les dark, ou d'ouvrir le capot pour faire les lights, le tout piloté par Kstars/ekos/indi)
Cordialement
-
1
-
-
Il y a 1 heure, TuxAstro a dit :
Curieusement, je le trouve très précis en répétition pour du banding, j'ai eu un peu la même chose en mettant un PWM sur la boite à flat Lacerta et ca donnait un peu la même chose...
Habituellement les bandeaux de LED on les alimente en 12V ou 24V continu, donc on n'est pas censé avoir de "clignotement", mais si il y a une alimentation à decoupage pour transformer du 230V alternatif en 12V continu alors il y aura un risque de variation de l'éclairage pendant que les rideaux de l'obturateur parcourent le capteur... Mais en utilisant une batterie 12V continu cela devrait corriger le problème
-
il y a une heure, TuxAstro a dit :
OK c'est pas dematricé mais je vois bien les lignes horizontales ...suis sur Siril en mode histograme, fichier 1.fit
Tu as tout a fait raison.
J'était resté en mode linéaire où cela n'apparait pas...

A priori c'est un classique sur certains modèles Canon (je n'ai pas ce phénomène sur mon Canon 80D), voir sujet ci dessous, cela ne viens pas de la boite a flat mais du capteur lui même.
Cordialement
-
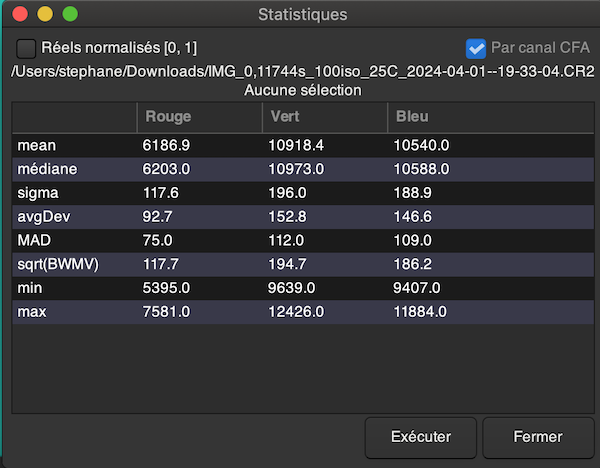
Bonjour,
@Hubus Ton flat me semble très bien, temps de pose approprié pour avoir un histograme equilibré, pas de pixels cramés
Ci dessous les stats données apr Siril
Sachant que l'APN Canon fait des fichiers RAW en 14bits, donc avec des valeurs entre 0 et 16384
La dominante vert/bleu par rapport au rouge est lié à l'utilisation de LED, une led ne produit pas un spectre équilibré...
@lionthom La dominante verdatre, c'est lié aux LED
Si on veut un flat blanc il faut d cela lumière blanche, les LED ne produisent pas un spectre équilibré --> sur la 2eme photo, moi je vois l'intérieur de la boite avec une dominante bleue
Concernant les taches, c'est bien sûr des poussières sur le capteur, le flat peut justement corriger cela (vue que l'on a les mêmes taches sur les lights), même si c'est mieux de nettoyer son capteur...
Ce n'est pas lié à la boite a flat. Eventuellement si problème avec la boite a flat on va avoir un défaut d'homogénéité de l'illumination, mais sur de grande zones (comme le vignétage).
@TuxAstroje ne vois pas de lignes problématiques, tu as bien ouvert le fichier raw en cochant l'option "dématricer" ?
Cordialement, Stéphane
-
Bonjour,
Les satellites GPS nous permettent d'une part avoir une source temps (temps GPS, et en ajoutant les secondes intercalaires le temps UTC) , d'autre part de calculer notre position (en sa basant sur le temps de parcours de l'information entre les satellites et nous)
Pour ce qui est de la source de temps, il en existe d'autres que les satellites GPS, comme notamment les serveurs NTP (eux même alimentés par des références d'horloges atomiques, mais pas celles dans les satellites GPS) , donc en cela le GPS n'est pas une grosse dépendance pour l'accès à la mesure du temps
Pour ce qui est du calcul de notre position, effectivement il y a des usages multiples et la disponibilité du GPS est jugée pour certains usages comme non fiable:
- en cas de guerre un ennemi peut détruire ces satellites. Une IEM est possible, mais l'attaquant risque d'y perdre aussi ses propres satellites, par contre on peut aussi les détruites avec des missiles plus conventionnels (certains pays ont déjà testé avec succès, causant la multiplication des débris spaciaux) https://www.lesechos.fr/industrie-services/air-defense/destruction-dun-satellite-par-linde-un-acte-strategique-aux-consequences-imprevisibles-1004218#:~:text=L'Inde est devenue mercredi,évoluant autour de la Terre.&text=C'est une affirmation de,résonne dans le monde entier.
- mais en cas de guerre, le fournisseur du service GPS (l'armée US initialement) peut decider de couper la partie "publique" (une partie des infos sont non cryptée et publique permettant une precision "moyenne", l'autre partie permettant une precision plus important est cryptée). Initialement le GPS n'était utilisables que par l'armée US et autres services gouvernementaux US. Il me semble que c'est depuis la présidence de Bill Clinton que l'usage civil a été ouvert, mais l'armée US se garde le droit d'en couper l'accès en cas de besoin
Cela a poussé d'autre pays (y compris "alliés" des US) de chercher à ne plus dépendre du GPS américain: Glonass pour la Russie, Galileo pour l'Europe, Beidou pour la Chine, IRNSS pour l'Inde)
Pour certains cas d'usages l'accès au GPS n'est pas possible ou jugé non fiable pour determiner sa position exacte.
Par exemple, pour les sous-marins, on peut capter le GPS en surface pour faire un point sur sa position, mais en navigation sous marine, pas de GPS, il faut utiliser des centrales inertielles (il y en a plusieurs et depuis longtemps dans chaque sous marins)
Pour l'aviation commerciale civile, les avions de ligne sont dotés de 3 centrales inertielles (3 car en cas de panne et d'indication contraires, cela permet d'avoir un vote majoritaire à 2 contre 1), pour ne pas avoir a dépendre du GPS
https://fr.wikipedia.org/wiki/Centrale_à_inertie
Donc oui, le GPS est un outil pratique, mais soit rassuré, il n'est pas indispensable pour avoir accès à une source de temps fiable.
Cordialement, Stéphane
-
2
-
-
Bonjour @roger15,
Pour le GPS, le problème est simple, il n'y a pas de problème. Le GPS (et Galileo) ignorent les secondes intercalaires, donc le temps GPS est différent du temps UTC.
Pour Beidou, l'equivalent chinois du GPS, il ne tient pas compte non plus des secondes intercalaires (même si il n'a pas la même référence de temps que le GPS, chacun ayant comme référence sa data de mise en service.
Pour Glonass, l'equivalent russe, par contre il semble qu'il intègre les secondes intercalaires.
Pour les systèmes informatiques, le protocole NTP (Network Time Protocol) permet de se synchroniser avec des horloges de références (en tenant compte des temps de propagation de l'information pour aller chercher la dite information). La dérive est corrigé dans les deux sens, avance ou retard.
Cordialement, Stéphane
Pour info:
https://first-tf.fr/wp-content/uploads/2017/09/2-2-50-ans-Seconde-Arias.pdf
edit:
http://leapsecond.com/java/gpsclock.htm
-
1
-
2
-
-
Bonjour
@astronomie_1009 A la lecture des échanges un doute me titille... Tu as bien compris que l'on parle ici du temps de pose "total" et pas du temps de pose unitaire des photos ?
Vu que ton telescope semble disposer d'une monture azimutale motorisée, la photo est possible mais il y aura de la rotation de champ, donc il faudra des poses unitaires pas trop longues (par exemple 30 secondes, en limitant le temps de pose unitaire cela va éviter la deformation des étoiles due à la rotation de champ).
Et il faudra faire plusieurs photos (par exemple 120 pour "cumuler" 1 heure de pose, avec des poses unitaires de 30 secondes), il y aura une petite rotation qui ira croissante au fur et a mesure des photos, mais les logiciels de traitement effectuerons la rotation nécessaire lors de la procédure d'alignement de photos, quite à recadrer le résultat pour couper les bords (par exemple en les traitant avec Siril)
note: un telescope "pas très ouvert" plus une monture azimutale, ce n'est pas le plus pratique pour faire de la photo, surtout sur des objets peu lumineux, mais il faut essayer 🙂
-
1
-
1
-
-
Lego
dans On fait une pause
Dans la même veine, pour ceux qui ont un anniversaire proche, ou a défaut pour Noël prochain...
Le rover Perseverance https://www.lego.com/fr-fr/product/nasa-mars-rover-perseverance-42158
Un Orrery Soleil-Terre-Lune https://www.lego.com/fr-fr/product/planet-earth-and-moon-in-orbit-42179
Cordialement
-
3
-
-
Bonsoir,
La dernière photo du post ci dessus montre un des "pied" de la sonde, qui a cassé, ce qui explique a priori le basculement de la sonde sur le coté.
Sur une autre photo, la 1ere des 4, on voit deux des pieds vus par le dessus pendent la descente.
Cordialement
-
1
-
-
@sixela Rien a voir avec le sujet d'origine sur les batteries, mais je vois que tu as toi aussi un Alkaid 10pouces. L'as tu déjà transporté en avion ? pas soucis lors des contrôles ? Il est annoncé comme compatible pour un transport en cabine, mais ayant peur de le voir refoulé je n'ai jamais osé l'emporter en voyage, donc si tu as tenté l'experience ton avis m'intéresse.
-
Concernant la consommation de ton materiel
Pour l'asiair mini la doc indique qu'il faut une alim 12V 2A, mais ici aussi 2A c'est la conso max avec des périphériques qui sont connectés sur les ports 12V OUT de l'asiair.
Et pour la camera 294MC pro, sa conso elle va dépendre du refroidissement
A ta place, ce que je ferais (si tu n'emmène pas le powertank) :
- alimenter l'asiair avec une batterie 12V 1.5A, et brancher l'aliéna de la monture sur l'asiair (elle va peu consommer en suivi)
- alimenter la camera avec la seconde batterie 12V 1.5A sans activer le refroidissement ou très peu (par exemple viser -10° au dessous de la temperature ambiante, pour avoir le refroidissement qui ne dépasse pas 50% de sa puissance max)
Si tu emmène ton powertank bresser tu n'aura aucun problème de capacité (et a priori pas de problème de transport selon @sixela qui a déjà expérimenté). L'asirair + monture + camera (avec refroidissement léger) ne devrait pas dépasser 3A de consommé sous 12V
Avec sa capacité de 155Wh, en 12V cela donne environ 12.9Ah, cela te donnera un peu plus de 4h d'autonomie (dans les faits on ne peut pas consommer 100% de la capacité, mais dans les faits tu ne tirera pas non plus 3A en continu)
-
il y a 5 minutes, niko94100 a dit :
Car ils sont généraux et non en fonction de la compagnie
Tu as raison, les contrôles son mutualités et effectués par l'exploitant de l'aéroport (ADP pour Roissy et Orly)
Dans ce cas c'est la règle IATA qui s'applique, voir ici: https://www.iata.org/contentassets/6fea26dd84d24b26a7a1fd5788561d6e/dgr-62-fr-2.3as.pdf
Concernant tes batteries Omegon, il faudrait du detail sur leur capacité (en Wh ou Ah)
-
Bonjour,
Ce qui compte c'est la capacité de la batterie en Wh et pas la puissance quelle peut débiter en W
Les règles distinguent d'une part la capacité et d'autre part font la distinction entre une batterie amovible ou pas
- Dans tous les cas les batteries de 160Wh ou plus, amovibles ou pas, ne sont pas autorisées, ni en cabine, ni en bagage en soute
- Pour les batteries entre 100 et 160Wh, cela peut varier entre les compagnies car il y a la règle globale IATA, puis chaque compagnie peut la transposer dans son règlement en la rendant plus restrictive (mais pas moins), si elles sont amovibles il faut les transporter en cabine, si elles sont non amovibles on peut les laisser dans les appareils en cabine ou en soute, mais seulement si les appareils sont éteints. Certaines compagnies limitent le nombre à 1 ou 2 batteries (exemple Cathay Pacific), certaines autres demandent à être contacter en avance pour autorisation préalable (exemple Air France)
- Pour les batteries de moins de 100wh , ce sont dans la plupart des cas des batteries amovibles, il faut les transporter en cabine, si possible dans leur emballage d'origine, ou a défaut dans des pochettes individuelles, ou a défaut mettre du scotch isolant sur leur connecteurs --> ce qu'il ne veulent pas c'est des piles battons rechargeables en vrac dans un sac, car il y a des risques de court circuits entre les connecteurs... La plupart des companies fixent un nombre de batteries maximum (exemple 20 pieces pour Cathay Pacific)
note: j'ai un peu creusé la question car en avril je part aux US avec une StarAdventurer (et 2 lots de 4 piles lithium rechargeables, 3.5Wh par pile), et mon reflex Canon avec 4 batteries (16.2Wh par batterie)
Voyager en avion avec un PowerBank, je pense que la probabilité qu'il atteigne sa destination est proche de zero...
Cordialement
Exemple sur le site Air France https://wwws.airfrance.fr/information/bagages/produits-interdits-et-reglementes#4
Selon la compagnie qui va te transporter, voir sur leur site c'est certainement précisé. Si il y a plusieurs compagnies il faut prendre les règles les plus restrictives de chacune.
EDIT: si ton modele de Powertank c'est celui ci https://www.bresser.de/fr/Electronics/Alimentation-electrique/Source-d-Alimentation-Mobile-BRESSER-100-W.html
Sa capacité est de 155Wh (à 5Wh près il serait interdit de vol, hors transport fret)
Il se nomme "100W" car il est capable de débiter 100W de puissance sur sa prise 230V (donc 0.43 Amperes)
Si on utilise ses prises 12V, il peut débiter une puissance de 180W (donc 15 A)
Mais comme sa capacité est de 155Wh, si tu tire une puissance de 100W alors cela va tenir 1.5heures, et en 12V, si tu tire 180W alors il tiendra 3/4 d'heure
La camera ASI294MC pro est refroidie, c'est pour cela que ZWO indique d'utiliser une alimentation 12V 3A, mais cela indique le max de consommation avec le refroidissement au max, dans les faits tu consommera moins
Mais si tu ajoute la conso de l'asiair, alors a mon avis il faudra du 12V3A pour le cumul des 2 appareils
-
MY fp pro
dans Les bricoleurs
Bonjour,
Le problème semble venir du fait que d'une part l'include porte sur le fichier "myAFMotor.h" et que d'autre part le fichier téléchargé via le GitHub se nomme "AFMotor.h".
Modifie la directive d'inclusion en supprimant le "my" en trop...
Si c'est juste un problème de nom de fichier cela devrait être ok, par contre le risque c'est que le nom de fichier soit different car ce n'est pas la bonne librairie, et là il y aura d'autres erreurs de compilation si le code référence des objets (variables, fonctions) qui ne sont pas dans le code de la librairie
Cordialement
-
Bonjour,
1) concernant la video, j'ai l'impression qu'entre la position 1min50 et 6min20 il montre comment démonter/remonter différentes pièces qui n'ont rien a voir avec la batterie (ou sinon je n'ai pas compris la logique), mais la logique c'est peut être utile pour ceux qui ont d'autres composants à changer dans leur téléphone...
2) Tu trouvera sur Amazon pour une vingtaine d'euro une batterie compatible avec ton telephone, souvent vendue avec les outils nécessaire à l'ouverture du téléphone
Personnellement j'ai changé en décembre dernier la batterie d'un iPhone 6s datant de 2015. Cela m'a couté 19€99, batterie, outils et livraison comprise.
Ce qui est important c'est de trouver une video bien faite qui décrit le process. Celle que tu donne en lien n'est pas un modèle du genre, et plus ton telephone est "rare" et moins tu trouvera de tutos en ligne
3) de toute façon, quite a avoir un telephone en panne, risquer une vingtaine d'euros pour tenter de le réparer, a mon avis il ne faut pas hésiter, si tu l'abime plus et bien tant pis, tu ne perdra pas plus..
EDIT: par exemple, cette video me semble beaucoup plus didactique (sauf la musique qui est insupportable...)
Cordialement
-
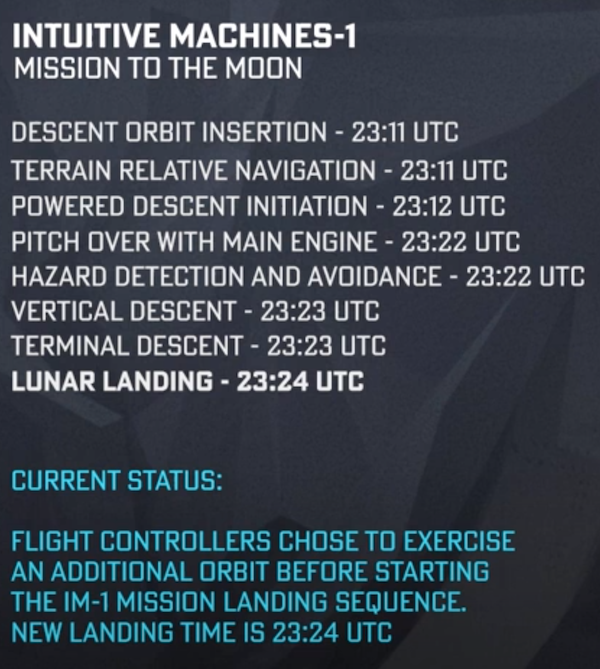
Merci pour l'info.
Nouveau planning publié, décalage de 2h (1 orbite de plus avant désorbitation)
-
Il y a 3 heures, chris33930 a dit :
Vous avez des techniques pour passer tout ca en tirant et sans abimer les prises?
Il y a plusieurs possibilité:
1) si tu n'a pas encore fait la tranchée pour emmener les cables à l'observatoire
Lorsque tu fera ta tranchée, pour y mettre une gaine, il faudra la choisir de diamètre suffisant pour y passer facilement les cables électriques + la fibre + un tire fil, le tire fil étant en prévision du futur si besoin d'ajouter un cable ou de remplacer le cable ou la fibre existante
important: habituellement les gaines électriques grises font 16/18/20 ou 25mm de diamètre, c'est insuffisant pour pouvoir y glisser ensuite un cable réseau avec sa prise RJ45 !!!. Il faut préférer des gaines de 40 ou 60mm de diamètre, même si c'est plus cher. Toujours penser aux besoins futurs.
2) Si tu as déjà fait les travaux, avec une gaine et les cables électriques ET QUE TU AS PENSE A METTRE UN TIRE FIL
Si le diamètre de la gaine est suffisant tu va pouvoir tirer la fibre ou un câble rj45 via le tire fil
Pour éviter que cela coince, la technique est de recouvrir l'embout (connecteur fibre ou connecteur rj45) avec du scotch solide pour donner une forme effilée pour mieux glisser dans la gaine, et ne pas hésiter a y vaporiser du lubrifiant au silicone
3) Si tu as deja fait les travaux, que tu n'as pas passé de tire fil pour les usages futurs (c'est pas bien !), mais que tu pense que la gaine à un diamètre suffisant
Il te faudra trouver un tire fil de longueur suffisante (c'est un peu cher), ils sont le plus souvent en plastique plutôt rigide mais avec un peu de flexibilité pour pouvoir être poussés dans la gaine, la suivre sans se tordre (sans se coincer en travers), mais flexible pour suivre facilement les courbes faite spar la gaine
Une fois que tu aura pu passer un tire fil tu te retrouveras dans le cas numéro 2
4) Si tu as déjà fait les travaux, avec une gaine trop petite pour y passer autre chose, il ne te reste plus qu'a rouvrir t tranchée pour y passer une 2eme gaine... avec un cable RJ45, ou avec une fibre (et un tire fil pour les usages futurs)
Cordialement
-
Le 16/02/2024 à 12:43, chris33930 a dit :
Donc du coup mettre un switch gigabit et me connecter dans la maison au switch gibabit et non plus a la box 100 mb? dans ce cas je comprends mieux?
Ce qui est important sur ta box pour la vitesse du réseau domestique c'est la vitesse des ports du switch intégré, pas le débit vers le net.
Si ta box dispose de ports 1Gb alors tu peux les utiliser pour ton réseau interne qui sera en gigabit même si ton accès internet est en 100Mb, voire moins de 16Mb si ADSL et pas fibre.
Par contre si ta box dispose de ports 100Mb (mais c'est de plus en plus rare avec les box qui supportent la fibre) alors autant ne pas les utiliser et mettre un switch gigabit, comme cela ton réseau interne sera en gigabit et la limitation à 100Mb sera seulement pour aller sur le net
-
Il y a 11 heures, chris33930 a dit :
si tu dis que ta box n est pas Gigabit comment en ajoutant un autre equipement le reseau peut il avoir la vitesse Gigabit?
Bonjour,
La remarque de @HPMâdest pertinente
Il faut distinguer la bande passante dont tu as besoin sur ton réseau domestique et la bande passante dont tu as besoin vers/depuis internet
Tu peux très bien te construire un réseau interne à base de switches 1Gbit, qui aura un accès internet via une box 100mb.
Les flux entre la maison et l'observatoire seront en 1gb, mais tes téléchargements seront limités à 100mb par la box pour joindre le web
Si ta box est une box Gigabit, comme la mienne alors utiliser son switch interne ne limitera pas le débit interne, mais par contre si la box dispose de ports 100mb (comme celle de @HPMâd alors il vaut mieux coté maison installer aussi un switch gigabit, sinon non seulement tu auras un debit vers internet en 100Mbits mais les flux entre maison et observatoire seront aussi limités à 100Mb
note: pour illustrer le propos, ma box et mon réseau interne sont en Gigabit, mais le lien CPL entre elles 2 étages est en 600Mbits seulement (1200Mb théoriques, 600Mbits rééls), ce qui limite le débit entre elles 2 étages, et si le PC à l'étage veut télécharger sur le net il est aussi limité à 600Mb
On peut avoir un réseau hétérogène avec des liens ayants des vitesses différentes, mais pour aller d'un point A à un point B le débit sera limité par le tronçon le plus faible
-
Bonjour,
1) Pour les raisons déjà précisées de distances et de risques électriques, une fibre optique entre la maison et l'observatoire c'est très bien
Il te faudra un lot de 2 extender fibre/RJ45 (50 euros sur la zone) (recherche sur google: extender ethernet fibre)
Selon les extenders choisis ils utiliserons soit de la fibre mono mode soit multimode (le plus souvent du mono mode qui supporte plus de distance)
Vérifier le type de connecteur pour la fibre, soit SC (gros connecteur) soit LC (petit connecteur)
Et une fibre, le coût dépend de la longueur, compter 75 euros pour une fibre de mono mode à connecteurs SC de 100m de long
2) N'importe quel switch fera l'affaire. Selon le nombre d'équipements à connecter à toi de voir si tu prend un switch 5 ports, 8 ports ou 16 ports
1 des ports sera utilisé par l'extender, les autres ports pour le PC, le raspberry, la camera, etc...
pas besoin de prendre un switch "managé"
Personnellement j'utilise des switches 5 et 8 ports Netgear, modèles GS105 et GS108. Il y a aussi des versions avec PoE plus cher, mais je ne vois pas l'intérêt
3) normalement sur ta box internet ADSL/Fibre il y a plusieurs ports RJ 45, plus du Wifi
Tu auras donc
Internet <-> ADSL ou fibre <-> BOX <-> Wifi (avec pleins d'équipements connectés au wifi)
... BOX <-> RJ45 <-> extender fibre 1 <-> fibre 100m <-> extender fibre 2 <-> RJ45 <-> switch observatoire <-> RJ45 <-> PC (et autres)
Important: ce montage implique qu'il y a à l'extérieur de ton domicile une prise réseau (le switch dans l'observatoire) ayant accès a ton réseau domestique, avec les problèmes de sécurité que cela pose. Lorsque tu n'utilise pas ton observatoire tu peux cependant déconnecter le cable qui part vers l'observatoire au niveau de ta box
4)Le switch de l'observatoire n'a pas d'adresse IP a lui (sauf si tu prends un switch manageable), il se contente d'étendre le réseau géré par ta box
Par défaut les périphériques sont configurés en mode DHCP, c'est la box qui gère le réseau et qui distribue les adresses iP sur le LAN domestique, mais tu peux si tu le souhaite mettre des adresses IP statiques
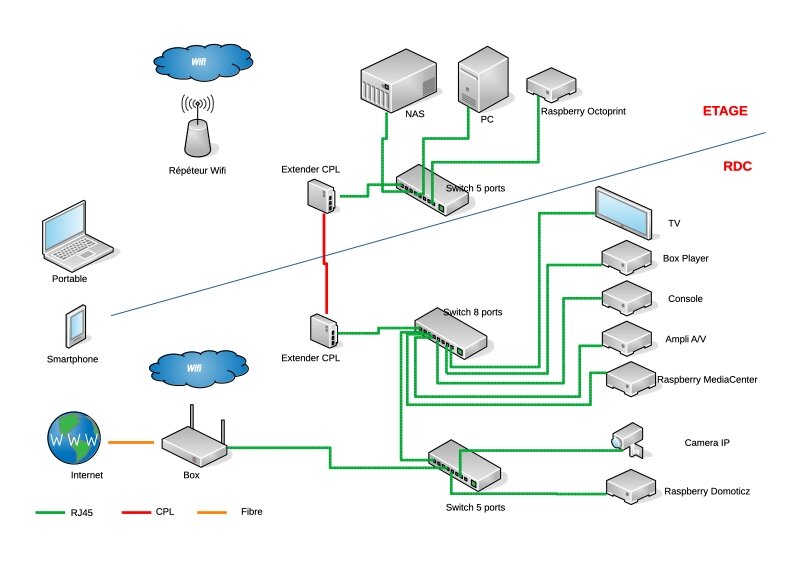
Exemple de montage réseau que l'on peut réaliser avec un extender (ici un extender CPL entre 2 étages, on peut aussi le faire avec un extender fibre si la distance est importante )
Exemple lot extender monomodes (47€)
Exemple fibre optique 100m (76€)
Exemple switch 5 ports (24€)
Cordialement, Stéphane
-
2
-


















Eclipse du 8 avril 2024, depuis l'Arkansas
dans Astrophotographie
Posté · Modifié par keymlinux
@NeandBonjour. Que de questions ... 🙂
Pour être synthétique dans la réponse, en fait c'était ma première eclipse totale (ben oui), celle de 1999 j'était au boulot (jeune débutant avec pas beaucoup de congés, et a l'époque pas de RTT, mais on avait pu monter sur le toit de l'immeuble pour observer ce qui restait pour moi une eclipse partielle) , et en 2017 j'avais hésité a faire le déplacement vers les US et cela ne s'est finalement pas fait... Cette fois ci j'ai combiné le déplacement pour l'eclipse avec une semaine de vacances à NY 🗽.
Et comme c'était la première je voulais surtout en profiter visuellement, et les photos c'était bonus si cela ne compromettait pas le visuel.
Donc comme il était indispensable de ne pas passer mon temps la tête dans la technique entre l'apn et la monture, mon choix s'est porté sur une automatisation du process de capture, et d'emmener ma Star Adventurer (c'était la première fois qu'elle prenait l'avion), ce n'est pas indispensable, mais si cela éviter d'avoir à recadrer manuellement c'est çà de gagné (et il n'était pas question d'embarquer l'AZ-EQ6 !)
Comme je fais de l'astrophoto en automatisant au max la prise de vue avec Kstars/Ekos/Indi, j'ai voulu automatiser un max ici aussi. Comme j'ai un macbook je me suis d'abord tourné vers Gphoto2, pour pouvoir "scripter" la prise de photo.
Puis en cherchant sur le net des tutos et conseils pour avoir les bons paramètres de prise de vue, je suis tombé sur le site de Xavier Jubier, qui d'une part propose un calculateur en ligne et d'autre part propose un soft tout fait "Solar Eclipse Maestro"
La calculatrice:
http://xjubier.free.fr/en/site_pages/SolarEclipseExposure.html
Solar Eclipse Maestro (sa tombe bien c'est compatible avec mon vieux macbook):
http://xjubier.free.fr/en/site_pages/solar_eclipses/Solar_Eclipse_Maestro_Photography_Software.html
Si tu as un PC "windows", il y a un soft équivalent ici:
http://moonglowtechnologies.com/products/EclipseOrchestrator/index.shtml
J'ai testé, et finalement j'ai adopté le dit logiciel (il me reste à faire une petite donation à l'auteur), qui permet de scripter facilement toutes les étapes de la prise de vue (et de tester). Oui, l'important c'est de s'entrainer avant et de tester. Cela m'a notamment permis de valider toute la séquence de prise de vue et de valider que la batterie de mon macbook et de l'APN tiendraient toute la séance (cela peut toutefois varier en fonction de la temperature extérieure, mais il ne faisait pas froid...). La contrainte c'est que cela oblige a emmener un ordi sur le terrain.
Au final j'ai:
- 100 photos pendant la phase partielle croissante (1pour chasse % de variation)
- 133 photos pendant le phase totale
- 100 photos pendant la phase partielle décroissante (1pour chasse % de variation)
Pour la monture, je n'ai pas fait de vrai mise en station, je l'ai orienté en gros vers le nord avec une boussole et en gros réglée à la latitude du lieux d'observation. Un peu de décalage ne me gênait pas. Pour le suivi, la SA dispose d'un suivi "Solaire" en plus du suivi "Sidéral"
Concernant les paramètres de prise de vue, globalement c'était f/11 et ISO100, puis faire varier le temps de pose.
Pour certaines photos j'ai testé du ISO400 et du f/16, mais aussi du f/8. Si c'était a refaire (et je compte bien le refaire 🙂 ) je resterais à f/11 en variant seulement le temps de pose. Et comme mon objectif reste bon à f/8 j'aurais aussi pu tout faire à f/8
Au passage, d'autres conseils sur les temps de pose disponible ici:
https://www.mreclipse.com/SEphoto/SEphoto.html
Donc au final, OUI on peut profiter visuellement ET faire des photos, mais seulement si on AUTOMATISE un max la prise de vue, et qu'en cas de problème technique divers (cela peut arriver) on fait le choix de RENONCER aux photos. Si tu loupe tes photos, tu en trouveras toujours faites par d'autres, mais le visuel et l'émotion qu'il procure, personne ne pourra le faire à ta place.
Des photos de l'installation, sur le parking du motel, orienté plein sud, surélevé par rapport à la route a coté
Le trépied photo est très léger mais cela tremblote un peu, en stabilité on a vu mieux, et j'avais oublié de le lester (il y a un crochet en bas de la colonne centrale, c'et fait pour). Sous la veste il y a le macbook ouvert, la veste c'est pour protéger et pour voir l'écran sans mettre la luminosité au max (ce qui ne permettrait plus de tenir 3h !)
EDIT: le cable noir qui traine par terre c'est un cable USB pour connecter un dongle GPS en l'éloignant des interferences du macbook, il est posé sur l'herbe...
Support de filtre et chercheur solaire faits maisons(impression 3D). Par contre c'est une piece en metal qui tient le chercheur sur le socle du flash de l'APN
Cordialement, Stéphane