
rpineau
-
Compteur de contenus
16 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par rpineau
-
-
Y'a aussi TheSkyX Pro (pas gratos... voir meme un peut cher, mais ca marche tres bien sur macOS).
-
Oops, oui SkySafari IOS ... comment ai-je plus oublier !! 😅
-
Pour Mac (macOS) :
- TheSkyX : https://www.bisque.com/product-category/software/
- Cloudmakers suite : https://www.cloudmakers.eu/xindigo/
- KStasr + Ekos : https://apps.kde.org/kstars/
- Starry night : https://www.starrynight.com/starry-night-8-professional-astronomy-telescope-control-software.html
- Stellarium : http://stellarium.org
- Carte du Ciel : https://www.ap-i.net/skychart/en/start
- Sky Safari : https://skysafariastronomy.com/skysafari-6-professional-astronomy-telescope-control-software-for-mac-osx.html
Et d'autre : https://www.macobservatory.com/mac-astronomy-software
Sur iPad si tu veux juste faire du planetarium y'a quelque truc comme Distant Suns, SkyOrbs, ...
Rodolphe.
-
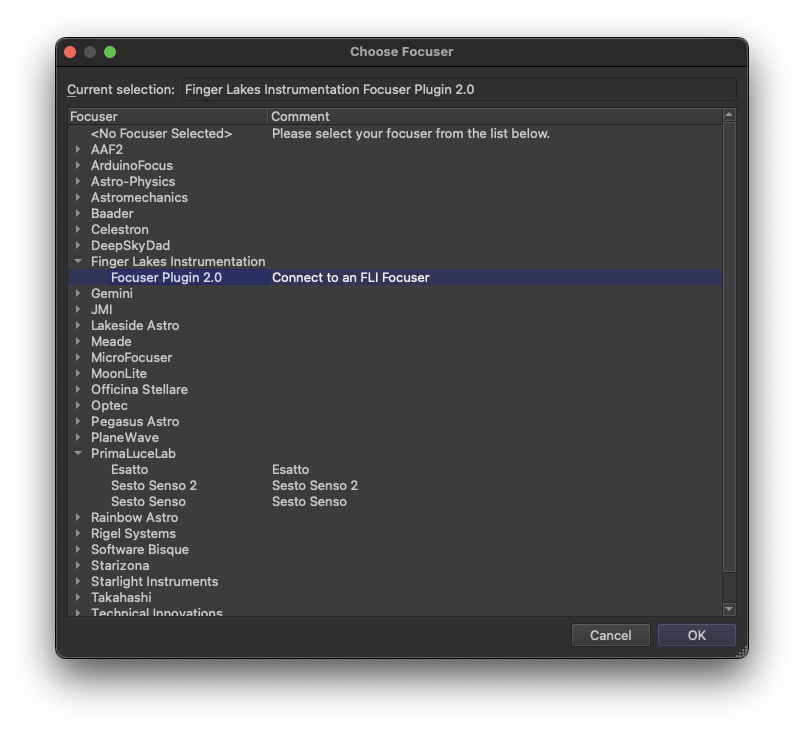
C'est effectivement une liste très réduite. Je viens de vérifier sous windows (ma copie écran original était sous macOS) et le choix est bien présent en version 32 bits et 64 bits.
Quelle version de TheSkyX as-tu ? (derniere version pour Windows est la 10.5.0 build 12243) .

-
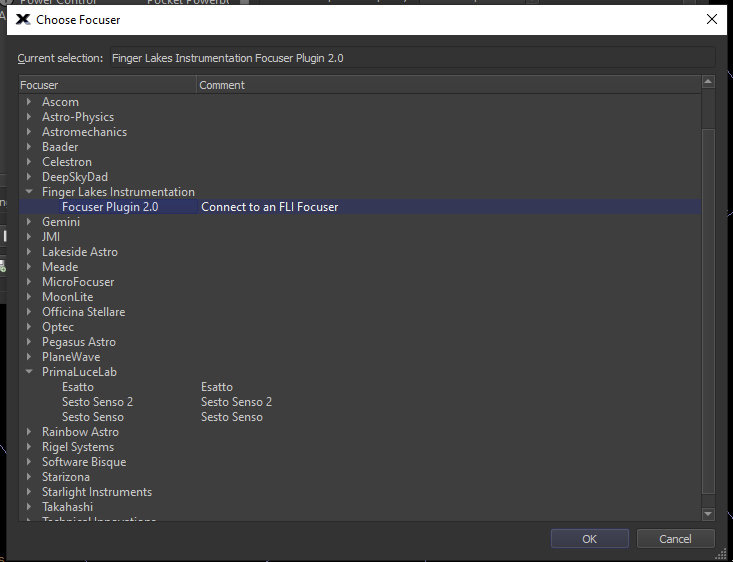
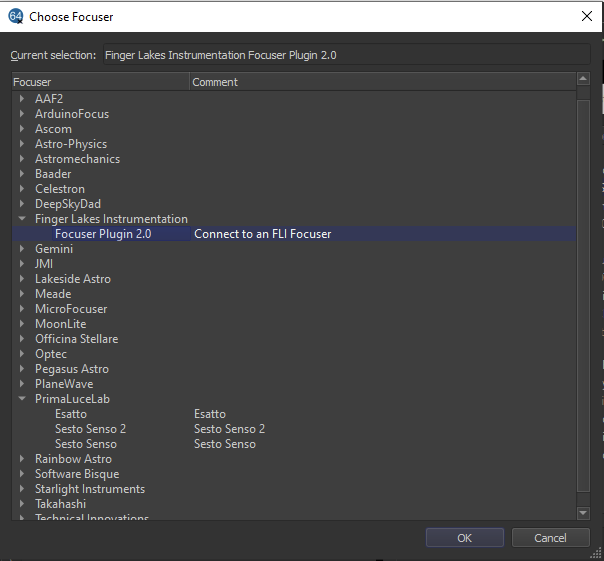
Pour le FLI Atlas, as-tu essayé la selection "Finger Lake Instrumentation -> Focuser Plugin 2.0" :

-
100% d'accord avec ce qui est dit au dessus.
Je ne me suis jamis inscrit sur Facebook et ne m'y inscrirais jamais.
J'ai mon propre petit observatoire et ai fait pas mal de truc moi-meme (comme le system de control complet dont la motorisation de la rotation, du cimier cimier, détecteur de pluie, ...).
Les forums dédiés à l'astronomie (qu'il soit Français ou autre, surtout pour moi qui ne vis plus en France depuis plus de 20 ans) sont l'endroit idéal pour ce genre de discutions.
-
 2
2
-
-
-
-
J'utilise une camera Moravian, une CCD, G3-16200 (KAF-16200 mono), donc même si j'ai vu les questions sur la C1 et C3, ne les ayant pas testé je me suis abstenu de répondre.
Ceci étant dis, la qualité des camera Moravian est largement au dessus de ce que ZWO ou QHY fait et si je devait changer de camera pour du CMOS je n'hésiterais pas a prendre une Moravian (je possède 2 camera ZWO ce qui me permet de juger la qualité
") ).
).
De plus, c'est une compagnie Européenne donc en cas de besoins , renvoyer al camera chez le constructeur pour une éventuelle réparation sera beaucoup plus simple.
Rodolphe
-
Oui.. diviser par 9.81 (donc 10).. désolé de l'erreur ... je devais avoir la tête ailleurs (N = mg ).
Mon contrôleur fait l'accelération et decelération donc c'est deja pris en compte
Bonne méthode pour trouver le couple minimum
Merci.
Rodolphe
-
Salut Philippe.
Effectivement trouver le bon moteur, surtout pour du moteur pas-a-pas, n'est pas toujours évident.
Si tu as accès a un dynamomètre tu peux déterminer la force nécessaire (en Newton) pour faire bouger le dome. Un fois cette valeur connue, en fonction du rayon de la roue cranté utiliser pour l'entrainemen,t tu peux determiner le moment de force (en Nm) nécessaire pour faire bouger le dome et donc te done une valeur en dessous de laquelle le dome ne bougera pas ( T = F.r , T =Torque , moment en Francais, F = force en newton pour faire bouger le dome, r = rayon de la roue en mètre).
Si le dome est lourd... il faudra surement passer a un moteur pas-a-pas au format NEMA 34 et avec une alimentation 48V avec un moment au alentour de 13 Nm et metre une boite de réduction d'au moins 10:1 ( la plupart de ces boite de reduction supporte jusqu'a 90Nm, soit 900Kg.m).
N'hésites pas si tu as d'autre question.
Rodolphe
-
1
-
-
Salut Philippe
Je vis au USA donc je vais donner les prix en $ comme j'achète sur mouser.com USA, mais ca se traduis facilement en €
il y en a environ pour $120 de composant pour la partie électronique (y compris le module XBee and l'Arduino DUE) pour faire tourner le dome. Faut ajouter le prix d'un bon moteur pas-a-pas et la boite de reduction pour avoir assez de force pour faire tourner le dome (coupole).
La platine (PCB) elle me est pas couteuse et j'en ai un dizaines pas utilisé encore (je les commande par 10 et ca me cour $50 en moyenne).
Si tu ne compte pas utiliser pa partie ethernet, tu peux construire la carte sans les composants pour cette partie et n'utilisé que la connection USB (Série). Le firmware détecte automatiquement quand le composant réseau est absent.
Coté assemblage, il y a des composant monté en surface dont soit faut avoir un petit four a refusion est préférable ( genre ca : https://www.amazon.fr/VEVOR-Refusion-Température-180x235mm-Circuits/dp/B08CD78RWB/ ) mais c'est faisable a la main si tu est bon a la soudure
Il faut aussi trouver un bonne courroie genre T10 ou T20 avec un roue cranté de diamètre suffisant pour mettre sur le moteur+boite de réduction. Et un bon controlleur de moteur pas-a-pas. En fonction du voltage que nécessite le moteur (12V, 24V, 48V ..) il te faudra le petite convertisseur que j'ai sur la page pour alimenter l'électronique en 12V car l'Arduino support un max de 16V en entré. Si le contrôleur de moteur pas-a-pas et le moteur sont en 12V, la carte peut alimenter le controlleur pas-a-pas directement.
La puissance du moteur est a déterminé en fonction de la force requise pour faire bouger ton dome. Un amis qui a un Exploradome utilise un moteur NEMA 24 avec un couple de 4Nm et un e boite de réduction de rapport 15:1 donc pour un couple maximum de 60Nm au niveau de l'axe.
Coté couroies, pas mal de personne utilise des couroie san fin T10 ou T20 avec un roue cranté de 44 (T10) ou 22 (T20) dents :
https://www.beltingonline.com/44-tooth-t10-pulley-al40t10-4998?zenid=3pahmsgpj9rbc7d0s4t81o0664
Su tu veux aussi automatiser le cimier il faut la 2eme carte avec la aussi un contrôleur de moteur pas-a-pas, moteur, boite de reduction, roue cranté et courroie ou chaine... et batterie , system de charge ...
La carte pour le cimier avec tout les composant reviens a environ $70 composant plus la platine (genre $5).
Je dirais en gros qu'il est possible de faire le tout pour moins de 500€
Rodolphe
Petite chose a noté : je n'ai fait que le plugin X2 pour TheSKyX.. donc si quelqu'un veux utiliser mon contrôleur avec ASCOM ou INDI .. quelqu'un devra écrire les drivers.. (je fait pas de dev pure Windows... 🤮 .. et j'utilise pas INDI..).
-
Je me suis fait mon propre contrôleur de dôme et voulais poster le lien au cas ou ça peut intéresser quelqu'un :
https://rti-zone.org/astro_dome_control.phpLa page est en Anglais.. désolé
Rodolphe
-
3
-
-
Celui de gotronic est ce qu'il te faut.
Si tu a besoins de plus d'une unité : https://www.amazon.fr/Elegoo-Pièces-ATmega328P-Contrôleur-Arduino/dp/B0722YYBSS/
-
Personnellement j'Utilise TheSkyX Pro ( https://www.bisque.com/product/theskyx-pro/ ) et comme pour faire de la prise d'image il faut le module camera, je dirais que la nouvelle version TheSkyX Imaging est probablement plus adaptée ( https://www.bisque.com/product/thesky-imaging-edition/ ).
TheSkyX n'est pas donné donc probablement pas ce que tu cherche pour débuter.
Ceci étant dit il y a plein de logiciel gratuit ou pas cher pout macOS :
Pour la prise d'image :
http://www.cloudmakers.eu/xindi/
http://www.openastroproject.org/
il y en a d'autre mais c'est un bon debut et sont les plus "connus".
Il y aussi l'option Kstar/Ekos qui utilise INDI : https://edu.kde.org/kstars/
Pour le traitement j'utilise PixInsight : http://pixinsight.com/
Par contre avec un webcam Logitech je suis pas trop sure que cela marche avec les applications de prise de vue macOS.
Rodolphe
-
1
-
Camera ceres c
dans Matériel astrophotographique
Posté
J'en possède une et ca marche tres bien. De plus Player One mets plus souvent ses driver a jours (et son SDK ce qui est bien en tant que developer).
Coté qualité de fabrication c'est excellent.