Denver29
-
Compteur de contenus
12 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par Denver29
-
Table équatoriale pour Dobson MEADE LIGHTBRIDGE 10"
Denver29 a répondu à un sujet de Denver29 dans Les bricoleurs
La motorisation avance doucement mais sûrement. J’ai abandonné l’option du moteur entraînant directement une des poulie car le moteur entravait le mouvement du plateau supérieur… J’ai donc continué à cannibaliser l’ancienne imprimante 3D en récupérant un rail linéaire et une vis sans fin, le tout relié via un charriot imprimé 3D qui entraine la courroie! Reste à imprimer un support pour le moteurs et aussi placer 2 contact fin de course de part et d’autre du rail puis enfin écrire le code Arduino et monter proprement l’électronique 😅
-
Table équatoriale pour Dobson MEADE LIGHTBRIDGE 10"
Denver29 a répondu à un sujet de Denver29 dans Les bricoleurs
Rebonjour! Déterrage des sujet! Non le projet n’est pas mort mais entre un changement professionnel, plus un déménagement et les enfants à gérer c’était en stand-by sur une étagère du garage … À la faveur de l’été et du dépoussiérage du Dobson pour quelques observations estivales je me suis remis à réfléchir sur la motorisation et je pense avoir vu la lumière en faisant du tri/rangement dans le garage. En tombant sur des pièces d’une imprimante 3D HS j’ai récupéré une courroie GT2 que j’ai intercalé entre les roulements et les secteur nord. Ça semble bien faire le taf sans aucun glissement et ça permet de motoriser l’ensemble sans toucher au roulements actuels! Je projette donc de faire tourner cette courroie autour de 4 points. Les deux roulements sur lesquels repose le secteur nord, un troisième roulements sur la gauche qui pourra s’écarter grâce à une vis et ainsi régler la tension de la courroie et enfin la 4ème axe à droite qui sera une poulie sur l’axe du moteur ( il sera monté perpendiculaire au secteur sur un support imprimé 3D). Ces deux derniers axe seront plus bas par rapport aux deux roulements du secteur nord pour que la courroie en contact avec ce secteur ne frotte pas contre la partie antagoniste. Le moteur est un NEMA 17 de 200 pas/tour. Commandé avec une carte Arduino UNO via un driver TMC2208 (lui aussi récupéré de l’imprimante 3D) on peut, via un mode micro-step, obtenir 3200 pas/tour. Ensuite mon secteur nord ayant un rayon de 380mm contre 10 pour la poulie entraînant la courroie j’arrive 0,17 minutes d’angle par pas soit environ 1 pas toutes les 1,5 sonde en suivi! J’arrive pas trop à me représenter ce que ça peut donner en terme de suivi (saccadé ou pas? Suffisant pour du visuel mais de la photo?). Je suis preneur de vos avis et suggestions avant d’aller plus en avant dans cette voie 😊 Sinon j’ai rajouté des molettes imprimées 3D pour réglé les pieds et la mise à niveau du plateau le tout contrôle par un p’tit niveau à bulle circulaire et la boussole pour l’orientation. Et désolé pour les quelques erreurs que je découvre en me relisant …
-
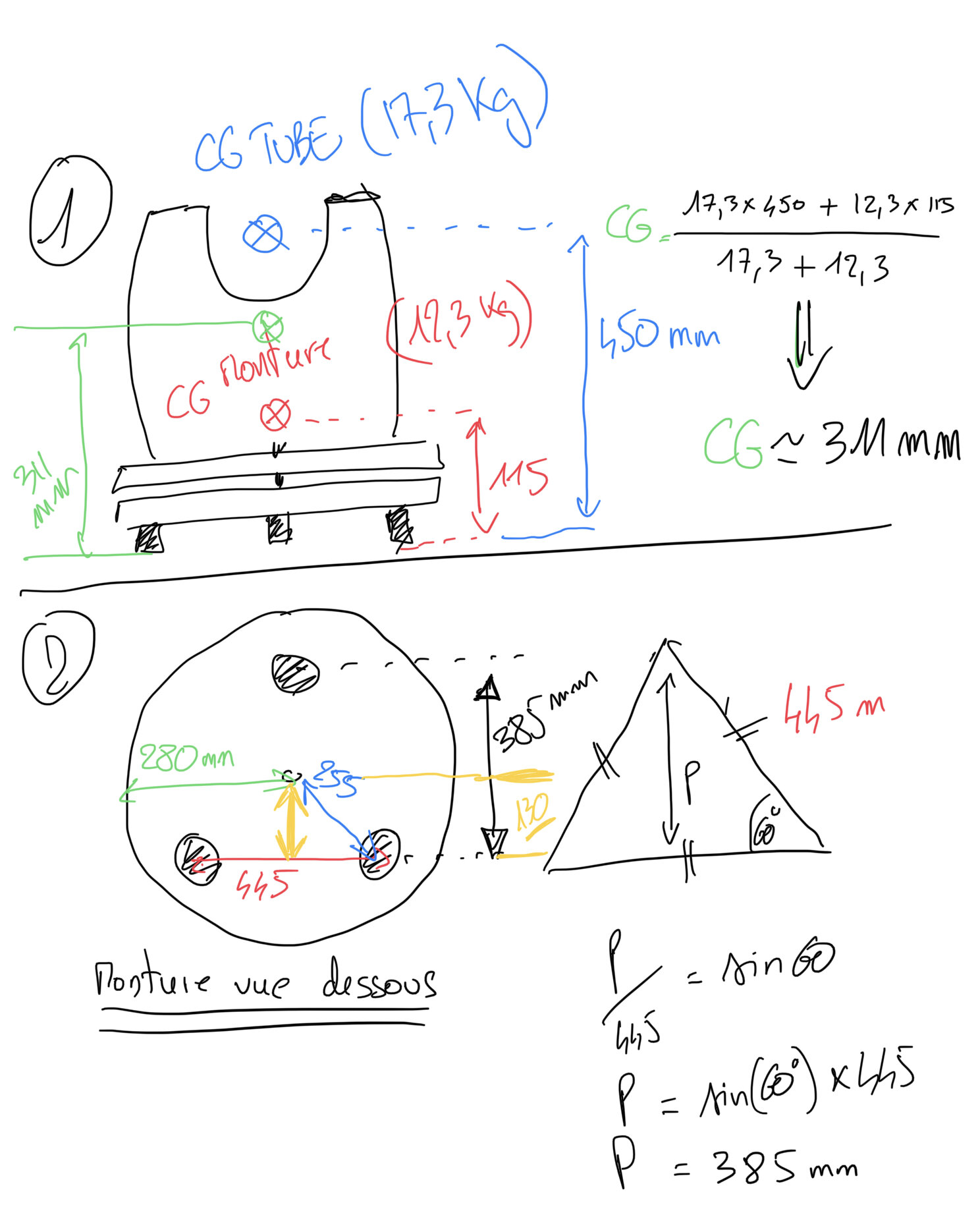
Bonjour Alors voila, tout nouveau sur le forum (je viens de me présenter dans la partie dédiée), je viens à vous pour partager et surtout prendre conseil pour la fabrication d'un table équatoriale destinée à accueillir un dobson meade lightbrige de 10" (254/1200mm) ... mais çà le titre vous l'apprenais déjà Pour l'instant j'en suis à fouillé le net sur tout ce que je peux trouvé sur le sujet (et ça renvoie souvent sur ce forum au final pour les francophones) et j'ai déjà quelques idées non vérrouillées sur ce que je compte faire mais si le but premier est juste d'avoir du confort visuel je me dit autant anticiper l’éventuelle suite avec un peu d'astrophoto et donc essayé de faire quelque chose de qualité. Pour la configuration j'ai pas encore fait mon choix entre secteur circulaire ou VNS pour le nord et rotule ou secteur circulaire pour le sud, le but étant de pouvoir assurer 1h de suivit si possible Pour la motorisation pareil j'hésite entre galet ou vis sans fin mais je compte utiliser du moteur pas à pas car j'ai des nema 17 d'une ancienne imprimante 3D que j'avais fabriqué à l'époque autant les récupérer Mais avant toute chose faut déjà que je calcule les dimension de tous çà et j'en suis là (voire photos) et je me pose déjà des questions: - les pieds du dobson doivent-elle idéalement se retrouver au dessus des roulement des secteurs? - le centre de gravité de l'instrument doit-il se trouvé pile sur l'axe polaire ou bien légèrement en dessous ou au dessus (pour une histoire de stabilité que j'ai pas bien saisi) ? - Comment calculer justement la taille, notamment épaisseur de la table qui va finalement conditionner à la fois le rayon et la partie utilisable du secteur (donc le temps disponible de suivit) mais doit aussi élever le centre de gravité du télescope à la bonne hauteur par rapport à l'axe polaire - enfin si quelqu'un à déjà réalisé une table pour le même type de télescope je suis preneur de son retour