

Corentin
-
Compteur de contenus
77 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par Corentin
-
-
Le robot étant développé dans le cadre du challenge DARPA, financé par l'armée US explique le nom choisis et la fonctionnalité.
Il n'y a rien à faire, toutes les technologies sont d'abord développées pour l'armée et ensuite retombent dans le domaine civil. (rappelons que le budget annuel de l'US Army est aux alentours de 650 milliards de dollars ...)
Les fusées et satellites sont avant tout issus de technologies militaires et personne n'a (encore) lancé un ICBM sur un autre pays.
Boston dynamics, qui est un des principaux collaborateurs sur ce projet de la DARPA, vient d'être racheté par Google donc on peut espérer que le côté guerrier sera vite mis éclipsé par les bénéfices sociaux.
A la base, le challenge requiert des robots participants de faire une série de tâches dans une simulation d'intervention sur site de centrale nucléaire endommagé. Ces tâches consistent en :
- conduire un véhicule utilitaire en évitant des poteaux
- monter des escaliers
- grimper une échelle
- dégager une porte bloquée par un éboullis
- utiliser une foreuse avec trépan pour trouer un mur
- actionner une clinche de porte
- fermer diverses vannes (manivelle ronde ou levier)
- autre chose dont je ne me souviens plus
Alors bon, c'est pas un rover qui va faire ça...
Et ce robot n'est pas fait pour travailler en gravité faible ou nulle (les contraintes dans ce cas sont très différentes et les articulations peuvent êtres bien moins costaudes).
Le fantasme de l'armée, c'est d'avoir ces robots pour servir de drone en lieu et place de soldats de la même manière qu'ils utilisent les UAV à la place d'avion de chasse/reconnaissance.
-
Il est maintenant obligatoire de prévoir la réentrée des étages supérieurs de fusée à la fin de la mission (Vega, Ariane 5ME).
-
Ils expliquaient que le train d’atterrissage n'était pas le modèle nominal mais un dérivé de celui du F-15 utilisé uniquement pour ce prototype.
Si tu mets un parachute, tu n'as pas besoin d'ailes sur ton vaisseau. Et même un parachute peut poser des problèmes si il ne se déploie pas correctement. En terme de survie des astronautes, c'est tout de même mieux un crash à 300 km/h (en horizontal) qu'un crash en chute libre verticale.
Pour l'IXV, qui est pourtant une simple mission robotisée, nous le faisons amerrir et lors de son drop test, les bouées ne se sont pas bien déclenchées car le choc sur la surface de l'eau fut plus doux qu'initialement prévu et les capteurs n'ont rien vu. C'est bien l'intérêt de faire des essais avec des prototypes avant de passer aux choses sérieuses.
-
Je suis effaré de voir la fusée partir dans un sens et la voir revenir à la base...
Je suis curieux de voir les réacteurs qui assurent la direction et/ou la forme du bas de la fusée...
C'est juste un problème de pendule inverse, un cas d'école bien courant. Ca ne nécessite rien de plus par rapport à une autre fusée.
Les tuyères des moteurs de fusées sont orientées par des vérins de vectorisation de la poussée comme sur Ariane 5 et Vega.
@ Jarnicoton, je ne comprends pas le but de ton message.
Quel est le rapport avec le sujet ?
La fusée de SpaceX est à 800m de haut et est donc soumise à de nombreuses perturbations (vent, rafales, ...) qu'il faut estimer pour un contrôle efficace.
Pour l'épisode Apollo, de quel film parles-tu avec la bannière étoilée au vent ? Le seul film que j'ai pu voir est tout à fait correct d'un point de vue physique, on voit que le drapeau est maintenu par une hampe verticale et horizontale (ben oui, sinon il tomberait mollement et empêcherait de voir le beau drapeau). Le fait qu'il bouge ne se fait que parce que l'astronaute donne des mouvements secs pour le mettre en place (l'effet d'inertie fait que le drapeau commence à bouger au niveau de son point d'attache), ensuite le bout du drapeau non tenu oscille pour rejoindre son point de stabilité et puis reste sans bouger.
-
Vu que l'on connait bien la mécanique orbitale, on essaie en général de lancer la sonde dans une direction avec un vecteur vitesse donné pour ensuite laisser la physique faire le reste (effet de fronde, etc). Il suffit alors de modifier le vecteur aux points clés pour passer d'une orbite à une autre sans trop se fatiguer (= consommer de l'énergie) vu que chaque changement de vecteur de vitesse consomme beaucoup de carburant.
Tout ceci est possible lorsque les astres sont dans une bonne position, c'est ce que l'on appelle la "fenêtre de lancement" qui est un créneau de temps permettant à la sonde de suivre la trajectoire requise. Je ne suis pas expert sur le sujet, mais par exemple, si tu veux aller sur Mars, il faut lancer la sonde dans une toute autre direction de façon à ce que la sonde et Mars arrivent au même endroit au même moment.
Pour ce qui est de la communication, on ne pilote pas une sonde "en direct", on lui envoie une série de commande de manoeuvre bien en avance et son ordinateur de bord les exécute quand l'heure de son horloge interne y correspond.
Ensuite, la sonde elle-même connait son orientation dans l'espace grâce à un chercheur d'étoile qui compare les étoiles qu'elle voit avec les étoiles de référence vers lesquelles elle doit pointer. (Comme on peut maintenant trouver sur des télescopes amateurs )
Pour un rover sur Mars, c'est un peu pareil, il ne s'agit pas de le piloter en direct. Chaque jour, l'équipe de pilotage analyse les photos pour trouver le meilleur chemin et planifier la route à suivre puis envoie les commandes. Heureusement, beaucoup de recherches sont effectuées dans ce domaine pour donner plus d'"intelligence" aux robots afin d'éviter eux-mêmes les obstacles (par exemple, chez Boston Dynamics).
-
Sisi, personnellement, je suis tous les jours mais il faut dire que celà devient banal.
Bien sûr, à chaque fois les systèmes découverts sont un peu différents avec des configurations qui ne cessent de démontrer que l'imagination des auteurs de science-fiction était finalement bien loin derrière la réalité.
Mais, à moins que de trouver quelque chose de vraiment fantastique sur lequel débattre, les gens se contentent de lire les articles sans commenter (du moins, c'est mon cas !
 ).
).En tout cas, Kepler-87 c semble effectivement être une bizareté vu sa densité.
-
-
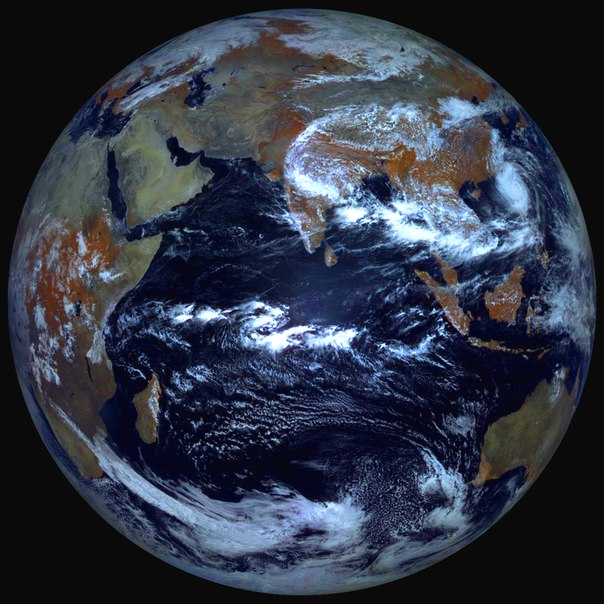
"планета", c'est le nom de la station de suivi/traitement de données en Sibérie qui dialogue avec le satellite Электро-Л (premier satelitte météorologique géostationnaire russe) qui a pris cette photo.
J'aurais plutôt appelé ce topic Земля ("Zemlia") qui est le nom russe de notre Terre. En tout cas c'est vraiment magnifique.
Ils disent que les images de ce satellite n'étaient pas prévu pour être mise dans le domaine publique mais que vu l'insistance des passionnés, ils ont rendus accessibles ces dernières en septembre.
Le commentaire russe qui va avec précise aussi, en plus des infos sur le fait que l'image a été prise lors du solstice en pointant à l'équateur :
Tout est comme d'habitude sur notre globe turbulent : un typhon sévit sur l'Asie du Sud-Est; sur la partie Européenne de la Russie des nuages et de la pluie; une tempête de poussière dans le désert du Taklamakan; il est minuit à Petropavlovsk-Kamtchatski (extrême est de la Russie).
(Mon russe n'étant pas fameux, je ne m'amuse pas à traduire le reste)
-
Petite question au passage. De la même façon qu'il y a des planètes éjectées de leur système solaire (planète "errantes"), peut-il y avoir des planètes / systèmes solaires / amas éjectés de leur galaxie hôte ? (et donc errants dans l'espace inter-galactique) ou bien les diverses forces en présence empêchent une telle situation de se produire ?
Je penses surtout aux événements perturbateurs comme une collision de galaxies où les objets les plus éloignés des centres galactiques pourraient se faire éjecter.
Merci d'avance,
Corentin
-
Juste mon avis à 2 balles :
- 100 milliards, c'est le coût de développement global du lanceur, qui risque de s'échelonner sur une bonne dizaine d'années (c'est le temps qu'il faut pour passer des spécifications préliminaires au premier vol pour une fusée comme Ariane 6). Il n'est pas dit que le programme ira jusque là et toutes les technologies développées/savoir faire acquis seront bons à prendre pour d'autres programmes plus réalistes.
- Pourquoi faudrait-il un but "utile" à un projet ? L'humanité a toujours travaillé sur des projets collossaux comme Stonehenge, les pyramides de Gizeh, les cathédrales, dont le coût est du même ordre, plusieurs centaines de personnes travaillant des dizaines d'années ... Il me semble plus intéressant de dépenser ce pognon dans un grand projet technologique que de dans des reality shows pourris et autres conneries du genre (quand on voit le cout de la guerre en Irak et en Afghanistan, on aurait put en faire quelques-uns de projets comme le SLS, ...)
Bien entendu, ça ne veut pas dire que je suis un défenseur pur et dur du vol habité. Avec un tel budget, je préfererais envoyer des sondes sur Encelade, Europe et Titan pour les inspecter plus en détails.
Il me semble juste intéressant de garder une population d'ingénieurs avec le savoir faire nécessaire (les gars de la Saturn V sont à la retraite depuis longtemps).
-
C'est surtout que c'est devenu une banalité.
Je regardais encore le manifeste mondial de tir de lanceur hier et avec au moins une fusée par semaine, il s'agit d'une activité devenue industrielle.
Les gens furent émerveillés avec les envols des premiers avions, maintenant on ne lève même plus la tête avec les centaines qui traversent le ciel chaque jour.
Je continues à regarder chaque lancement, mais uniquement parce que c'est ma passion et mon travail. (Travaillant sur les actuateurs des 4 étages de VEGA, j'ai l'estomac qui se noue lors du décollage en espérant qu'aucun problème ne survienne de ce côté-là)
Les lancements les plus intéressant sont les premiers où le risque de problème est le plus important. Ariane 5 est un lanceur mature dans sa configuration actuelle et sa fiabilité n'est plus à démontrer. Je travaille aussi sur les actuateurs du nouvel étage VINCI pour Ariane 5 ME et je suivrai avec intérêt le premier lancement (prévu aux alentours de 2017-2018).
-
Pour en terminer avec l'histoire de Bernouilli :
-
Il faut te dire que chercher un géostationnaire, c'est chercher un panneau solaire de 30 m à une distance de 36000km. Il faut déjà un beau diamètre pour les voir en visuel.
-
La SABCA y sera avec une maquette dynamique du système de contrôle des flaps pour la réentrée atmosphérique de l'IXV.
Pas tout à fait représentative la maquette vu que les vraies pièces sont bien gardées mais ça donne une bonne idée du projet (en plus, les actionneurs utilisés pour cette maquette sont ceux du troisième étage de la fusée VEGA).
J'ai aussi reçu un mail de l'ESA qui disait qu'il y aurait une maquette échelle 1:1 d'Alphasat, le plus gros satellite de télécom européen ( 7m de haut, 2.8 m de large pour 6.6 tonnes).
Alors, personne d'autre de l'industrie spatiale pour nous dire ce qu'ils ammènent ?

Merci pour l'info quetzalcoatl, je ne manquerai pas de jeter un oeil sur ces conférences (surtout si elles sont disponibles en différés !)
-
Vous pouvez toujours ironiser, il me semble que la rapidité du battement des ailes d'insectes est permise par leur petite taille. Une cigogne ne peut pas battre les ailes aussi vite qu'une libellule.
C'est une question de taille d'ailes. Si tu augmente la taille, tu augmente l'amplitude de déplacement et tu baisses donc la fréquence de battement pour une même énergie.
Si ta cigogne battait des ailes à la même fréquence qu'une mouche, l'accélération en bout d'aile nécessiterait une contrainte telle que ses ailes s'arracheraient.
-
Les gyroscopes sont les «*reaction wheels*» sur le schéma :
Un petit peu à la bourre mais juste pour préciser qu'une "reaction wheel" n'est pas un gyroscope mais moyen de controler l'attitude du satellite. En gros, c'est un moteur avec une roue à inertie et, lorsque tu le fais tourner, tu exerces un couple sur la roue mais donc aussi un couple de réaction sur le stator relié au satellite. Le satellite se met donc à tourner sur le même axe que le rotor mais avec une vitesse plus lente (suivant le rapport des inerties).
Si ta roue est bloquée, ben, tu ne peux plus tourner et donc plus suivre les étoiles que tu traques.
-
D'après mon expérience, je penses qu'ils ne veulent pas dire que le but de l'essai est de ne rien casser mais qu'il faut concevoir les stratégies d'essai avec une optique de protection de l'équipement.
En tant qu'ingénieur d'essai en environnement pour l'industrie spatiale, je fais ce genre de qualification en vibration en permanence et nous placons des "notchs" (diminution controlée du niveau injecté) aux fréquences de résonance de l'équipement pour ne pas l'endommager car le but est de vérifier sa capacité à encaisser un certain niveau de vibration mais pas aux fréquences de ses modes propres.
On coinçoit les équipement en prévision des fréquences d'excitation qu'ils verront lors du lancement/atterissage (chaque lanceur ayant sa signature propre, il est important de le choisir au moment de la conception de la charge utile) or, lors d'un balayage sinus, on passe par toutes les fréquences comprises dans la tranche (en général, 5 Hz à 150...200 Hz pour les gros équipements/satellites et 5 Hz à 2000 Hz pour les sous-équipements).
-
Info étrange et aucune source sérieuse facile à trouver.
Cette mission existe bien sur le site de la NASA. Par contre, les "magnetic portals" dont ils parlent me semblent assez vague. Il faudrait voir ce qui se cache derrière ce terme mais surement rien à avoir avec ce que l'on imagine dans les ouvrages de science-fiction.
-
Par définition, biodégradable veut dire qu'il faut une activité biologique pour dégrader le matériau et vu que l'on a rien trouvé s'approchant de ça sur Mars pour l'instant ...
Pour le skycrane, il faut se dire qu'un atterissage en douceur requière beaucoup de carburant pour contrer la gravité alors que s'écraser ne demande rien. Je ne sais pas si ils avaient encore assez de carburant et il est plus facile de n'emporter que le nécessaire pour descendre curiosity et puis de mettre plein gaz pour être sûr que l'impact n'endommage pas le rover.
-
Skylon
dans Astronautique
Je suis tombé par hasard sur cette machine en développement et je n'ai pas vu de message sur le forum en parlant.
Donc, est-ce que quelqu'un connait un peu le SKYLON ? A part les infos wikipédia et le site de la société qui le développe.
http://www.reactionengines.co.uk/
En gros, il s'agit d'un avion capable d'aller en LEO et de faire des réentrées en utilisant un moteur hybride pouvant fonctionner soit en moteur avion (air atmosphérique) soit en moteur fusée (oxygène liquide).
Il a un petit air de SR71 en plus évolué.
Le but, c'est de réduire drastiquement les coûts de mise en orbite, un peu comme la navette mais avec des coûts de lancement moindre puisque ça décolle comme un avion, donc économie de poids/carburant. Après, ils annoncent des coûts de mise en orbite de 650 £/kg au lieu des 15000 £/kg actuel. (vu les déboires de la navette, j'ai quelques doutes sur ces chiffres mais pourquoi pas)
-
Moi je te conseillerais plutôt de chercher du matériel correct dans les petites annonces.
J'ai acheté un oculaire William Optics SPL 6mm à 50 euro il y a deux ans, ce n'est pas la même chose qu'un skywatcher.
J'ai aussi acheté un filtre DGM Optics Nebulae pour 35 euro qui est un des meilleurs filtres type UHC.
-
Une adresse mémoire corrompue aurait mis l'ordinateur en boucle et le système a réagi correctement en basculant sur l'autre machine. Formidable architecture quand même!
Cependant, les différents sites ne se concordent pas tous, parlant d'un basculement manuel d'ordinateur 'A' à 'B'. Mais alors, si 'A' était dans une boucle, comment a-t-on communiqué pour demander au système d'activer le 'B'. Y a-t-il un système "régalien" qui gère les A et B tout en communiquant ?
Le plus simple étant d'envoyer un technicien sur place pour appuyer sur "reset"...
Je ne connais pas l'architecture de Curiosity mais normalement la redondance se fait à plusieurs niveaux. Il doit y avoir, comme tu le dis toi-même, une partie de gestion de la redondance indépendante du reste capable de switcher du module A au module B sur commande manuelle. Normalement, il devrait y avoir aussi un watchdog qui déclenche en cas de boucle pour passer automatiquement sur le module redondant.
-
Oui, ils ont purgé les systèmes avec de l'hélium ce qui semble avoir débloqué le problème. Reste maintenant à trouver l'origine (corps étranger comme pour Ariane 5 ? ).
-
Problème résolu, mais apparemment pas d'arrimage demain comme prévu (dimanche ?)
Pas tout à fait, ils n'ont pas encore récupéré les pods 2 et 3.
Apparemment, ils disent qu'ils ne feront rien avant début de la semaine prochaine.
Les panneaux ont été déployés car ils craignaient que le mécanisme ne se grippe en descendant trop bas en température.
SOURCE : le podcast en direct sur le site de la NASA
Valkyrie, le Iron Man de la NASA
dans Actualité
Posté
Difficile d'obtenir des infos sur ce robot mais suivant l'article suivant (http://nasawatch.com/archives/2013/12/nasa-jscs-valky.html), il serait arrivé en dernière place à la première manche du concours DARPA ...
Ils en sont tellement gênés qu'il n'y a aucune informations officielles du JSC et qu'ils ont enlevé leur site de la toile.
Reste à savoir pourquoi les performances furent si mauvaises.