

damien7400
-
Compteur de contenus
51 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par damien7400
-
-
Salut,
je vous laisse mes scripts d'installation (sh ./sh) pour les raspberry sous raspbian
astropi = update, Kstars, Indi, astrometry.net, PHD2, + 2Gb de swap + autoremove des packet
astrometry = installation automatique des dalles astrometry-data-42xx-42xx_0.45_all de la 4203 à la 4219 (3 bons Gigas de téléchargement)
pour rappel, dans le terminal on lance > sudo sh astrometry.sh pour lancer le script si celui-çi est placé dans la racine /home/"mon nom ou ce que j'ai mis comme nom etc...."
Scripts à lancer le soir, avant d'aller au lit, ils auront fini au réveil...
")
-
Salut à tous
un petit retour d'expérience sur la PI4 4Gb
j'utilise un setup HEQ5-EQMOD + ASi183MMPro + Asi120 guidage + Focuser Htecastro DC
Une raspberry PI3B avec Indi-server sous Raspbian
Un PC Ubuntu avec Kstars, liaison via la livebox avec 2 nanostation (Pont Wifi)
Depuis deux semaines j'utilise une PI4 4Gb à la place de la PI3B,
ASI sur les ports USB3.0
EQMOD et Focuser sur les USB2.0
Pont wifi sur l'ethernet
Carte 64Gb, Rasbian Buster
Horreur du moment:
nouvelle prise micro-usb pour l'alim
nouvelles prises micro-HDMI pour l'écran
2 jours à chercher tout ça
Grande surprise:
Raspbian Buster permet de faire tourner Kstars/Ekos et PHD2
Résolution 1920x1080
j'utilise habituiellement Indiserver avec les photos qui s'enregistrent sur mon PC via kstars au chaud à la maison
PHD2 tourne sur la PI4 en local (contrôles avec VNC depuis le PC)
Pour résolutions problèmes, ou calibration, alignement polaire: j'utilise kstars directement sur la PI4 (VNC -> tablette pour l'interface), la vitesse de transfert des images est fulgurante en local (Sortie n&b 16b -> 20Mb en 3s), affichage temps réel fullsize très rapide pour les réglages
Température avec boitier compact aluminium < 40° avec Kstars et PHD2
Pour le remote: ayant des vieilles antennes nano2 d'ubiquiti je ne peux dépasser 1Mb/s (entre 960 et 780kb/s), donc pas d'amélioration sur le réseau
mais moins de perte sur la caméra dans PHD2 (timeout)
J'en suis très content, mais seul la qualité du réseau permet d’améliorer visiblement le pilotage complet, avec le vieux pont wifi je ne peux faire la différence entre PI3 et PI4
Si quelqu'un a eu le privilège de tester le port ethernet de la PI4 à plein régime .....
-
 1
1
-
-
salut,
rien trouvé
serait ce l'option flip dans le panneau de contrôle INDI, onglet de ta caméra, dernier onglet "controls" -> Flip ???
si la brume se lève je te teste ça, j'ai une asi120 sur lunette guide et une asi183 sur newton
-
Salut,
Attention aux "transfos", même si aujourd'hui la plupart des alims sont à découpage, triacs etc ...
en courant continu les alims ne délivrent pas de tensions 12v lisses continues à partir d'un courant alternatif (ça finit même en signal radio, parasitage de la CCD et pire encore)... mais quand elle est chère et de bonne qualité et à 60% max de ca capacité en Ampère alors ça doit être stable et "propre"
Il y a beaucoup d'alims différentes et plus ou moins chères, la plupart vont avoir (et ça faut le mesurer pour s'en convaincre) des variations de 14v à 10.5v en cours de séance.... pas bon
pour une monture qui consomme "2A", il faut une alim minimum de 5A voir 10A, bien contrôler sa tension en utilisation, si la tension sans charge (sans monture) dépasse 13V il faut jeter (alim style PC portable, appareil domestique...)
d'en avoir testé et démonté: peu tiennent le coup
Le soucis est d'alimenter des moteurs + électronique avec une seule alim -> batterie quasi indispensable
J'utilise deux batteries au gel 27Ah et 45Ah masses reliées pour alimenter les raspberry, cameras, refroidissement caméra (3A), monture (2A), focuser
-> la raspberry, l'eqmod et le sysncan (et la caméra usb: parasites évités) ont la même masse
avec un PC l'interface série EQDIR ou EQMOD peut (c'est quasi sûr) envoyer une tension bien décalée par rapport au reste alimenté par "transfo" (deux alims différentes + isolation galvanique), et là c'est le drame
Ne pas oublier que sur nos montures les masses de toutes les cartes/accessoires se relient bien souvent uniquement via les interfaces USB (500mA max aïe!).......
-
alors il faut regarder du coté des options Av (changement vitesses obturateurs auto selon photometrie) ou photométrie, auto expo, ou autre option cachée dans un coin de menu qui provoque un changement de vitesse d'obturation....
-
Le 29/10/2018 à 15:28, zombuy a dit :
Ekos ne peut pas reprendre la main une fois que l'APN est sortie du mode bulb?
Salut,
quelque soit le système d'exploitation, le logiciel, avec un APN CanonEOS par exemple, celui çi doit être paramétré correctement en manuel (Manu/Bulb/Format Raw ou Raw/jpg etc etc) AVANT d'être branché/connecté à un ordinateur ou tablette, PI etc etc...
Beaucoup d'options selon le modèle d'APN peuvent apparaitre sans pour autant être changeable/paramétrables via logiciel extérieur.
-
Linux et astro
dans Software
Bonjour Viloque,
je sais que je ressors un vieux post,
mais as tu l'INova fonctionnelle sous INDI/Ekos/Kstars ???
Pour ceux qui cherchent une solution rapide à l'astro-PI
, voici mon script d'installation pour:
Sous Ubuntu-Mate ou Lubunt, Xubuntu sur Raspberry-PI 2/3B
Sous Ubuntu Mate pour Raspberry 3B+ (Plus) -> Pb de drivers car trop récente -> image disque pour l'installation sur SD 32 GB: Torrent image carte SD Ubuntu Mate pour PI3B+
Lien vers le forum et le concepteur de l'image: https://ubuntu-mate.community/t/raspberry-pi-3-b-doesnt-boot/16424
Script pour l'installation de la suite INDI/Ekos/Kstars/PHD2
Le script installe
VNC-Server (noter votre IP ou passer en IP Fixe)
Update/upgrade
Kstars-Bleeding
Indi-full
PHD2
GSC
Astrometry.net
SwapFile 2 Gygabytes
Samba (partage fichier réseau Windows)
Auto-remove
Restera: la désactivation de l'automount pour les caméras dans le bureau
les mises à jours au démarrage de Kstars (assez long, "Extra-DATA", catalogues, thumbnails etc etc)
Les fichiers INDEX pour astrometry.net en mode OFFLINE sous Kstars
script d'installation des INDEXs de 2000 à 8 arcsecondes (SD 32Gb minimum)
L'ensemble fonctionne plus sereinement ainsi qu'avec une fluidité nettement meilleure avec la PI3B+, a suivre dès que les nuages feront un peu de place aux étoiles....
Pour augmenter la stabilité en remote depuis le salon jusqu'au jardin, ou en nomade avec commande depuis le smartphone j'ai opté pour l'adaptateur tp-link 722n, très efficace pour un prix honorable, il est livré avec un cable rallonge de 50/60cm qui permet d'éloigner l'antenne de l'electronique/moteurs/trépied d'un chouillat ce qui n'est pas négligeable

-
Salut,
pour le visuel j'utilise un setup rapide composé d'une alt-az Goto Skywatcher et d'un Mak 100/1400 Bresser (dont je suis épaté), une batterie gel 18Ah, oculaire celestron XCEL-LX 25, et 7, Barlow XCEL-LX x3, et un Plossl 32mm (livré avec le mak) , en gros un setup à 500-600€ (sans les oculaires) en surfant sur les périodes de promos.
J'ai un ciel très clair, et majoritairement transparent donc le 100/1400 passe très bien en CP et planétaire, toutefois si j'avais attendu 2 semaines les promos m'auraient permis d'avoir le 127/1500 au même prix...
A préconiser: le 127/1500 minimum pour beaucoup de bonnes raisons.
Les petites alt-az goto de skywatcher sont compactes et légères et tolèrent un Mak sur le nez, toutefois il faut bien organiser les câbles (imagerie planétaire, goto, alim ...) car là ça gigote quand même (rien qu'un poil de vent...)
Pas de collimation sur le Mak sauf accident, pour l'instant depuis plus d'un an j'ai toujours la tache d'airy au poil.
L'ensemble alt-az + Mak est vraiment rapide et efficace, pour le transport j'ai acheté un grand "tupperware" de 60 x 40 x 30 où je place le mak, batterie, synscan, accessoires etc, j'en suis resté scotché plusieurs mois au détriment de la photo
Sinon l'ensemble etant compact (comparé a un newton) avec le cache à visser sur le pare buée, monté sur monture/trépied ça ce porte tranquille sur l'épaule.
Les alt-az goto permettent l'alignement diurne (de jour) sur une planète, très pratique cet Eté avec toutes ces planètes, j'installais tout le soir avant le couché du soleil avec un alignement sur Vénus, Jupiter... (possible avec la lune également)
Les Bresser sont pas mal du tout, en tous cas le 100/1400 est épatant, je n'attendais pas une telle qualité/robustesse. Toutefois: j'ai enlevé la pt'ite molette trop molle de mise au point et remplacée par une roue (qui sert d'entrainement par courroie avec le moteur pas a pas collé au tube ) bien plus large pour avoir plus de force et de précision.
Maintenant, je suis au centre de l'allemagne et je n'ai pas besoin de filtre, les lumières sont éteintes à 23h30, le ciel est transparent > 25° d'alt, en dessous ça bullote sérieux, peut-etre qu'en Provence mon mak sera bien moins épatant...
Le Mak dort à la cave (17 à 20°C), ça aide pour la mise en température (30-60 minutes), car au début -l'habitude du newton- je m'étais demandé ... c'est quoi cette soupe ???? Il était stocké dans l'appart, bien 2h d'attente pour que le champ de vision soit correct (nuit fraiche, très fraiche...)
-
Salut à toi,
concernant Ekos/Kstars: beaucoup d'options sont déjà là pour le Dôme, le focuseur, l'astrométrie, pas de programmation si les drivers existent (là il faut bien vérifier)
Il y a une interface d'alignement, de prise de vue, de pointage, puis de séquenceur. Chaque interface peut servir à éditer des plans (où l'on a déjà tout préparé et sauvegardé), elles se lancent depuis le séquenceur, manuellement ou en fonction de la météo, de la Lune, de l'obscurité..... Bref: si les paramètres sont bons, le séquenceur lance l'ouverture du dome, unpark la monture, cherche la cible la plus haute dans la liste des objets prévus, lance l'astrométrie, corrige, lance l'autoguidage avec calibration, focus etc etc prises de vues et remballage.
Si le dôme n'a pas une interface connue dans la liste d'Indi, ou le focuser, ou autre.... là il faut scripter
-
Salut,
penser à relier les masses des batteries, sorties adaptateurs et régulateurs StepDown/StepUp. ça rajoute une araignée mais ça enlève de la friture sur le réseau, maintenant: avec de bons matériels la liaison équipotentielle des usb suffit, mais un StepUp/Down génère un peu ce qu'il veut, il y en a tellement sur le marché.
-> il faut penser à la réduction du bruit sur un DSLR Canon EOS par exemple, j'utilise un adaptateur secteur remplacé par un StepDown sur la batterie 12V, en sortie 7.42V, mais le signal n'est pas toujours propre: une simple masse reliée entre la 12V, l'HUB usb, le StepUp et je n'ai plus une seule reboot de la PI3B (trèssss sensible) et un signal plus calme au niveau du Canon.
Dernièrement: reboots intempestifs à cause de l'EQMOD, elle est sur l'HUB Usb maintenant et ça roule.
Pour les régulateurs il faut bien 5A (au moins), s'ils n'ont pas de radiateurs (même petit), ils risquent de se couper à cause de la chauffe, utilisés à 60-70% ils doivent tenir sans problème, à 100% on risque la µ-coupure
-
 1
1
-
-
Salut,
niveau infos c'est loin d'être pauvre, mais plutot dispersé en réalité
Premier lien pour démarrer: tutos Indilib
Evidement, il manque des explications générales qui décrivent "tous" les éléments, mais en cherchant sur les forums et les tutos on trouve ses réponses car les libs(drivers) utilisent pratiquement toutes les mêmes configs sous Ekos.
-
Salut,
ayant eu ce problème, je me permet d'ajouter qu'en se positionnant en direction de la Polaire, il suffisait de cliquer sur "Current" dans la ligne "Park" du Tab "Site Management" de la Monture sous Ekos, ne pas oublier de cliquer "write data" (toujours dans la ligne "Park") si vous utiliser un EQMOD.
C'est tout bête, mais un peu dangereux pour le matériel si on lance un alignement sans savoir que le Park n'est pas fixé.
-
Salut,
j'ai installé le système équivalent: UBUNTU Mate 16.04
Tuto français (le mien...)Tutoriel Ubuntu Astro.pdf
PHD2, Kstars sont de la partie, le tout compatible EQMOD, Canon, ASI...... en WIFI, Bluetooth ..... Depuis le Salon avec VNC Viewer, bref: cool
Je ne reviendrais plus sous Windows pour l'Astro, je viens de passer l'eeePC en Ubuntu Mate (en gros, même installation sauf partions et allocation 3Gb swap -> +3Gb de Ram sur Disque pour faire tourner le Canon EOS sans soucis), La PI3B pour le ciel profond, le eeePc pour le planétaire (avec de l'usb qui cartonne l'ASI, mais: seulement 2 USB)
Petit lien sur mon forum "habituel", j'y laisse mes tests et retours d'expériences (rien de bien extraordinaire tout de même)
Le tout fonctionnant sur carte SD, celle çi doit vraiment être rapide et de bonne qualité, l'alimentation doit suivre (du 8Gb consomme beaucoup moins qu'une carte 64Gb -> Flash ROM),en RJ45 avec VNC c'est très fluide, plus que sur PC, mais en WIFI ça devient plus coton: toutefois sans bug contrairement à un sytème windows. Le boitier est très petit et léger, fixé à la monture sur l'axe DEC, il ne dérange pas. Utilisation depuis le Smartphone en 1920x1080 sans soucis ou depuis le PC du salon.
-
Salut à tous
Un poil nouveau parmis vous, mais content de trouver des utilisateurs de Linux !!
J'utilise une PI 3b pour le gros Setup Ciel Profond, mais pour le planétaire je viens de recycler un Asus eeePc, grâce à une clef USB, Ubuntu Mate 16.04 LTS, pour le reste ce fût l'install° complete comme sur la PI.
-> différe,nce avec la PI, l'Asus tournait en Windows 7, puis Windows 10
-> donc windows bloque depuis le Bios (je n'aurais pas trouvé seul) grace au démarrage rapide de celui ci, option qui shoote le démarrage depuis une clef usb .... alors qure le bios est configuré "démarrage sur lecteur externe" en priorité 1
1. dans le BIOS chercher une autre option de démarrage appelée QUIET BOOT ou QUICK BOOT
2. Passer l'otion (QUIET ou QUICK) à NON -> ne me demandez pas pourquoi QUIET sur certains PC et QUICK sur d'autres....
3. Sauver, rebooter
4. démarrage impeccable depuis clef USB (Avec image Linux Live)!!
-
Perso j'aime bien, c'est un exercice très sympa !
Ne reste plus qu'à faire toutes les constellations accessibles !
Albéric
J'ai commencé, je voulais faire tout le ciel.....

mais c'est chaud à traiter, surtout pour faire ressortir les couleurs sans gonfler le fond de ciel malgré les darks (80 darks en général), les étoiles ressortent un peu trop grises, trop de la même couleur...
Cette photo du Cygne est bien belle, les poses/guidages/mise au point sont bien maîtrisées, et ce n'est pas si facile !!
Bravo !
-
Salut,
j'ai fait pareil, mais l'utilisation de la Barlow assombrit vraiment, le problème est la taille du capteur de l'eos, les webcams ont des capteurs plus petit: cela réduit le besoin de Barlowtage.
Je fais toujours la Lune au reflex, la qualité est vraiment meilleure, mais pour les planètes, le temps entre chaques poses est trop long, la planète cible tourne + rotation de champ ....
-
Salut à tous,
faute de moyens, la photo + monture etc etc
j'ai une NEQ5 + motor° AD et DEC via Hand Controler équipé d'un port ST4
Le port ST4 est à contacts secs permettant juste d'apporter une masse sur AD ouest/AD Est/Dec Nord/Dec Sud etc etc
Ascom est pratique, mais ils ont limité le Pulse Guiding à 30 secondes, j'ai donc créé un logiciel Ascom de Goto qui transforme des ordres "slew" en "pulse" sur boucles de 30s, malheureusement incompatible avec stellarium et autres, n'ayant pas trouvé comment simuler la position etc etc, deplus ils envoient des infos de déplacement en SLEW, et non en pulse.
Mon soft: il faut rentrer ce que l'on pointe (l'étoile sur laquelle on vient de faire sa calibration, mise en température, mise au point/collimation etc etc), et rentrer la cible. Il calcul les angles AD et DEC de déplacement, les convertit en durée d'impulsions (fonction vitesse raquette, pour moi: 16x max), qu'il divise en sections de 30s pour contourner la limite imposée par Ascom. Evidement, mieux vaut préparer sa soirée sur une étoile proche de sa/ses cible(s). Le goto prend rapidement 5-6minutes pour des déplacements comme Denebola->Vindemiatrix (lion->Vierge). Mais reste très précis et fiable, il suffit (et oui....) de taper un coeficient correcteur (x1.0014 ou x0.9994 par exemple) qui corrige la mécanique, après quelques soirées le goto est ainsi calé aux petits oignons si on est comme moi un poil perfectionniste.....
-
Salut,
pour les couleurs j'ai eu un pb similaires, identique même sur orion M42,
mauvais décodage RAW sous Iris
-
bonsoir à tous,
voici une tite orion M42 shootée entre les arbres du voisin et la brume montante de la plaine au Sud

http://www.astrobin.com/161449/B/
Canon 1200D non-défiltré + Correcteur de coma + Filtre Baader UHCS
11x300s 800ISO

et une tête de cheval qui passe toujours pas cause de brume de plaine qui arrive trop vite chaque nuit:

-
Bonjour, je dirait que
1: Ne pas laisser les câble pendre., surtout au niveau de la cam de guidage
2: Créer un léger déséquilibre en DEC, pour éviter le balancement du au jeux mécanique.
Après attendre d'autre avis de personnes, qui sont beaucoup plus expérimenté que moi en se domaine.
Yves.
Je pense avoir mis le doigt sur autre chose,
voui les oscillations viennent des boucles de mou des câbles rigidifiés, un pt'i coup de vent et hop effet ressort qui marche bien sur le câble USB de la lunette de guidage...
Mais surtout: décalage soudain et régulier vers le haut (l'étoile monte), peut -être à cause de l'approche de l'horizon, la réfraction atmosphérique...
A combien de degré d'alt au dessus de l'horizon la réfraction fait elle dévier les étoiles??
-
Bonjour à tous,
j'ai une NEQ5 motorisée AD/DEC + Raquette 0.5x, 2x, 16x pilotée par un module ZWO USB/ST4, Plb-Cx sur une zavarius 70/400 fixée avec des anneaux orion chers mais efficaces et stables. PHD2 au guidage sur un PC portable. La raquette est alimentée par une batterie Plomb 6V Panasonic 4.5AH avec voltmètre, 18H (3 nuits) d'autonomie même par -8°C.
L'imageur est un Canon EOS 1200D avec correcteur de coma skywatcher (0.95x) et filtre UHC-S sur un Skywatcher 130/650 Black diamond Crayford Dual-Speed motorisé. Imageur sur un autre PC Portable.
J'avais amélioré mon suivi grâce au démontage regraissage remontage (avec un serrage bien moins bourrin que celui d'origine, les vis étaient bloquées serrées avec des commandes vraiment dures qui accrochaient un peu).
Tout est amélioré, j'ai un petit jeu au motoréducteur DEC que je n'ai pas réussi à résorber, il pose pb sur 4s d'impulsion (style backlash) en vitesse x0.5.
Première question:
Le passage au méridien a t'il une influence sur la dérive en DEC?
Je guide soit en Nord soit en Sud, jamais en AUTO, je fais la MES par dérive jusqu'à 0.5" max, souvent vers 0.2" d'erreur qui correspond à une petite pente vers le haut ou le bas.
Le tout en automatique, je contrôle juste depuis mon ordinateur du salon, j'y reçois les photos du Canon.
Deuxième question:
comment faire pour les câbles ?
il y en a déjà pas mal, le problème: ils durcissent vite et bien dehors, cela déséquilibre la monture au bout de 2h....
J'ai essayer de les laisser pendre sans obstacles, ou de les attachés à la monture (partie basse) avec une belle boucle de mou.... mais ils deviennent durs et finissent par freiner la monture (oscillation AD voir DEC également).
J'aime bien avoir la monture équilibrée, ça me donne un bon suivi.
Troisième question:
Équilibrée ou déséquilibrée ?
Est ce qu'une monture déséquilibrée dès le départ (de façon adaptée à la position de la cible et à son cheminement), permet de moyenner les défauts sur la totalité du suivi? Si la monture est équilibrée, le suivi est OK (parfois bien plat sans turbulence) pour 1h, ensuite des oscillations apparaissent en AD puis finissent par contaminer la DEC (durcissement des câbles ou approche du méridien???).
Je précise qu'en ciel top sans turbulences, je n'ai pas de pb notable, mais en ce moment ça turbule un poil, je laisse faire en général car la turbulence est très rapide: un simple suivi sans autoguidage permet de constater si une vraie dérive est à corriger. J'arrive toutefois à améliorer la qualité des photos grâce à l'autoguidage, après 1h de suivi sympa..... ça se corse.

Des petites questions pratiques, qui peuvent servir à beaucoup je pense, parfois je grogne contre PHD2 mais.... rien que les câbles qui durcissent par exemple suffit à créer des défauts..
-
 Belle constellation
Belle constellationSalut,
très belle image, mise au point à pofiner (perso... j'ai toujours pas réussi à trouver le truc sur EOS1200D, c'est jamais parfait).
Essai en poses plus longues, ça doit passer vu ce résultat là
C'est déjà un top!
-
Bonjour,
Merci à tous de vos commentaires et conseils, ça console un peu de savoir que je ne suis pas le seul mais le problème reste entier.
Pour ce qui est d'éventuels mauvais serrages côté guidage je ne vois pas ce que je peux faire de plus ( j'ai d'ailleurs déjà cassé 2 vis sur les anneaux.... )
Quant à l'équilibrage j'espère que je n'ai pas tout faux.
Comme je vise à l'ouest je mets un léger déséquilibre est en déplaçant légèrement l'un des c/p vers la monture
Salut
je n'ai pas beaucoup d'expérience mais je réussi des poses de 600s avec une neq5 motorisée guidée par PHD2 (PLB-Cx sur lunette zavarius 70/400).
Je dis peut etre une bétise mais tes premières images me choquent un poil
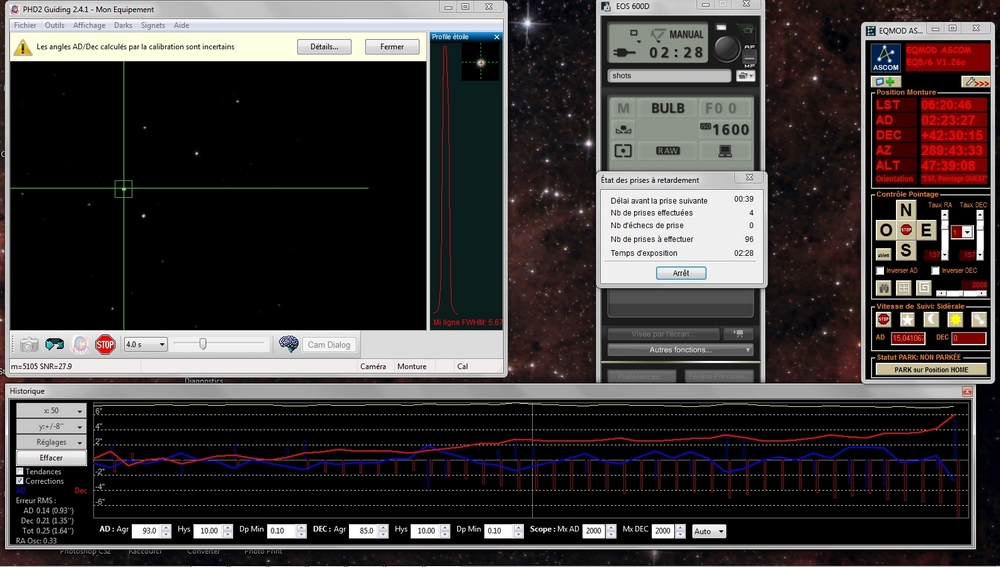
les réglages que je vois sous le graph de PHD2 ne me permettraient pas de faire de l'autoguidage, pas jusqu'à 600s... par contre je n'ai pas de réglage agressivité DEC comme toi.
Une étoile guide sur 4s... c'est chaud, PHD2 perso tourne correct de 1.5s à 3s au delà.... ça coince.
AD et HYS sont ok, DP Min pourrait descendre à 0.15, DP Min en DEC à 0.08, et surtout les ordres max à 2000ms, signifient qu'un seul ordre bloque toute compensation pendant 2 secondes... sur un autre axe, ou dans le sens inverse. 400 à 1200ms fonctionnent bien, il faut juste descendre le DP Min si on descend le MxDec ou MxAD.
4s de pose + 2 secondes de compens... ça fait long...
Pour la calibration: le max possible pour les pas: 2000ms je crois, mais 400ms en 0.5x à la raquette (pas de goto) me donnent ce genre de messages (sourtout en DEC). De toutes façons, plus le calibrage est long, meilleur sera la gestion du biniou... Je pense que ton soucis viens de là, si la MES par dérive donne un écart < 11", PHD2 devrait fonctionner mais avec une bonnecalibration. PHD2 ne semble pas trop aimer les caméras trop désaxées par rapport à l'AD et au DEC.
Ayant encore des soucis en DEC, je viens à l'instant de démonter le support queue d'arondes (2 vis), le boitier vis sans fin DEC (4 vis), et voilà... tout est propre et bien graissé, et tout frottent car les vis sont souquées (cad vissées bloquées comme mes ecrous sur les amortos du kangoo), impressionnant la force pour défaire les petites vis, mal equilibrées, certaines fortement bloquées, d'autres plus laches... idem pour l'ecrou de maintien de la vis sans fin qui comprimait les roulements comme un dingue, alors qu'il a un contre ecrou pour tout bloquer proprement sans frottement.... bon c'est une NEQ5 Skywatcher faite en Chine ou par là bas...
20 min de boulot et maintenant ça tourne sans frottements, test avec moteur: idem, plus de ralentissement à chaque tour de la VSF. Test moteur, les impulsions de 50ms passent en inversant le sens Nord/Sud, avant il fallait au moins 400ms pour basculer dans l'autre sens. Reste l'AD...

AD: pire, la vis sans fin était collée a la couronne dentée, j'ai du faire levier, la VSF a donc depuis le début repoussé la graisse dans un coin du compartiment en laissant la courrone bien sèche, bien propre...
Ecrou de blocage VSF encore une fois serré comme un dingue... maintenant les impulsions à 50ms passent très bien, changement de sens également !
Mais j'ai peur que la courrone ne soit bouffée.... Monture quasi neuve de Novembre... Reste à tester tout ça, même si j'ai gagné en efficacité sur les impulsions courtes, reste que PHD2 est un défit d'imagination pour le faire tourner toute une nuit sans bizarerie...

-
Courbe tout à fait normale avec l'erreur à 600 secondes qui correspond à une giration de vis sans fin.
Les erreurs entre 0 et 150 secondes de fréquence sont liées à la pignonerie ou au réducteur. (Ce sont elles qui peuvent être les plus gênantes en autoguidage et qui te donne une courbe noire très chaotique.)
Par contre, il y a un soucis...
Soit c'est durant un autoguidage
Soit il y a un problème d'échelle dans les valeurs en arc sec.
Soit tu as une EQ5 qui tourne aussi bien qu'une ASA.
Les deux premières solutions me semblent plus plausibles...
Pour réduire ça, pas de miracle.
De la bonne grosse graisse dans le réducteur peut lisser les choses mais le vrai truc c'est de passer vers une transmission avec poulie et courroie à la place des engrenages.
La monture était autoguidée, j'ai récupéré le log de la dernière nuit.
Merci pour vos commentaires,
peut on utiliser ces données pour pofiner le guidage ?
PI 4 et remote
dans Raspberry, Tinkerboard, etc...
Posté
Salut,
update après essais méchant de la PI4
J'ai rajouté une PI3B (l'ancienne) avec Ubuntu Mate avec l'asi224 pour faire tourner PHD2
un switch pour relier les PIs au pont wifi
PHD2 + Kstars sur une seule PI reste un problème, Kstars avec son autoguidage interne fonctionne très bien par contre
Il semble que les deux asi (183 et 224) rentrent en conflit dès que PHD2 est lancé, mais parfois ça tourne au top...
L'asi224 n'a pas d'alim, elle pompe pas mal sur le port usb de la PI
Gain: un usb de libre sur la PI4 pour mettre le disque dur (stockage portable des photos)
Test sous VNC:
alignement de la polaire avec kstars, avec l'asi183 sans latence, 4s par image le temps de tourner les vis alt/az, pas mal du tout, résultat 0"55 d'erreur pour le moment après 10 minutes de dérive + réglages.
A+