
Algeiba09
-
Compteur de contenus
36 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par Algeiba09
-
-
Salut à tous,
J'ai l'intention d'en construire une pour mon 300 et j'ai trouvé tout ce qu'il me fallait sur ce site.
http://www.reinervogel.net/index_e.html?/Plattform/Plattform_e.html
J'ai traduit une partie de la méthode de calcul des secteurs pour la table équatoriale ici
https://drive.google.com/file/d/1550ADo-x7zeSs6QE3CELSG6xAT1_1g5p/view?usp=sharing
J'espère que ça vous sera utile.
Bon ciel
-
Le 24/04/2018 à 17:20, patdut a dit :
Je pense qu'il faut adjoindre une horloge externe au système. Celle embarquée n'est pas suffisamment précise. De plus il existe des GPS qui peuvent être connectés via port GPIO.
Les drivers INDI "astroberry_diy" que j'ai "compatibilisé" avec la Tinkerboard devraient permettre de faire cela.
J'ai pas eu trop le temps de tester mais comme le port GPIO de la Tinker est pin pour pin compatible avec celui du Raspberry j'imagine que les composants annexes qui fonctionnent sur Raspberry devraient fonctionner aussi sur la Tinker.
http://pibot-maison.blogspot.fr/2016/01/installer-un-gps-sur-raspberry-pi.html
https://learn.adafruit.com/adafruit-ultimate-gps-hat-for-raspberry-pi?view=all
Salut Pat,
J'ai un GPS qui fonctionne sur un port USB on pourra le tester aux RAP avec la Tinkerboard, il fonctionne déjà sur tous les autres supports je pense que ça devrait le faire.
@++++
-
Bonjour Pascal,
Il est préférable d'être parfaitement de niveau, la première opération est de visualiser une étoile connue à l'oculaire et de synchroniser cette étoile sur Skysafari sur la tablette, tu peux faire deux étoiles pour être plus précis. Si tu n'est pas de niveau tu auras une erreur de pointage. Pour ma part j'ai fait une plateforme en contreplaqué marine avec trois pieds réglables pour mettre le télescope de niveau facilement. Attention au centre de gravité pour ne pas renverser le Dobson.
Autre point à bien prendre en compte c'est le jeu des patins des tourillons qui doivent avoir le moins de jeu possible quand tu déplace le télescope en azimut, c'est pour éviter les erreurs de pointage.
Bon ciel
Jacques
-
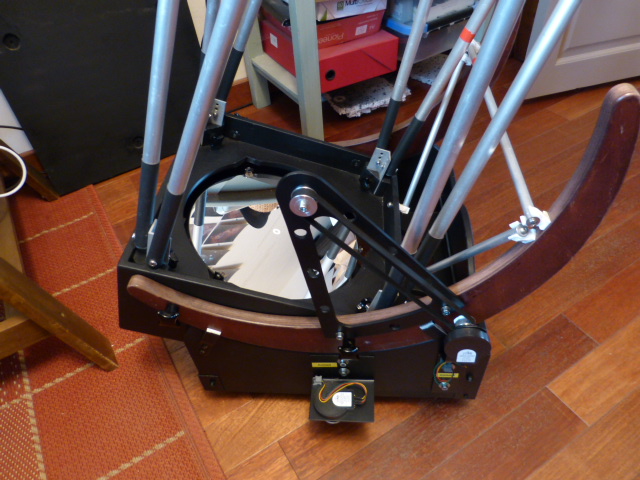
Salut à tous,
Je viens d'acquérir un Dobson 300 serrurier d'occasion, et comme je ne connais pas suffisamment les objets du ciel boréal (excusez mon ignorance et un peu feignant aussi) j'ai envisagé d'équiper mon télescope d'un système de pointage assisté.
D'abord merci à Patrick alias Patdut sans qui je n'aurais pas réalisé la partie logiciel sur le Raspberry Pi3, il avait déjà réalisé lui même ce type de système sur un Dobson 250 classique. Il me suffisait donc de trouver l’astuce pour l'installer sur un serrurier.
Nous avons fait les choix d'utiliser des courroies crantés et des poulies d'imprimantes 3D que l'on trouve à petit prix sur le site Aliexpress, les deux encodeurs utilisés sont de chez Astroshop ça reste l'élément le plus cher de la réalisation 240€ les deux.
L'ensemble des pièces réalisées ont été faites sans matériel particulier, une perceuse sans fils et une scie sauteuse pour la découpe de la pièce de centrage.
La longueur des courroies est déterminé par celle de la taille du Rocker et pour chaque instrument il faut refaire les calculs.
Le plus grand soin doit être apporté à la pièce de centrage de l'axe d'altitude dans l'espace.
Tous les détails sont sur le lien ci-dessous n'hésitez pas à me contacter.
https://drive.google.com/file/d/1KfaUBJ1Ky7FnQUJCNP1oSYvlWPkWGTTR/view?usp=sharing
A vous de faire
@ Bon ciel
Jacques
-
J'ai adapté le système décrit dans ce lien avec deux encodeurs et cela marche bien :
Bonjour,
As tu un lien qui fonctionne pour voir cette réalisation.
Merci d'avance
Jacques
-
Bonjour à tous,
J'ai eu le plaisir de partager une mission avec Stéphane Férratfiat à l'observatoire de Saint Véran (Astrqueyras) et à cette occasion nous avons réalisé des transits d'exoplanète. Comme je n'était pas spécialiste du logiciel Muniwin, nous avons réalisé ensemble un tutoriel sur le sujet.
Stéphane est un spécialiste en la matière et son aide m'a été très précieuse pour réaliser et compléter ce tutoriel. Encore merci à lui et j'ai le plaisir de le partager avec vous.
Je pense qu'il n'existait pas encore une version en français d'un tutoriel sur ce sujet.
@+++++
Jacques
https://drive.google.com/file/d/1Kvqmo3YrTWKGqgs2LWv9tW5ADJwMLkXn/view?usp=sharing
-
Bonjour à tous,
Je suis entièrement d'accord pour les remarques sur les caméra couleurs et monochrome.
Pour avoir les deux types de caméra une MORAVIAN G2-4000 et la nouvelle ASI294 chacune a une fonction bien précise et dépend du choix d'imagerie.
J'ai utilisé en poste fixe la première CCD avec les contraintes des filtres pour chaque couleur et le temps passé pour réaliser une image, la encore c'est un choix personnel.
Je cherchais une caméra couleur pour me faciliter la vie et obtenir rapidement une image sympathique, comme avec un APN (très performant quand il fait froid)
J'ai été bêta testeur pour la nouvelle ATIK Horizon et j'ai été déçu par les choix du capteur 1600 de chez Panasonic et je n'ai pas gardé cette caméra.
Je viens de recevoir depuis quinze jours la nouvelle ASI294 et je dois dire que les premiers tests sont satisfaisant. Bon rapport signal bruit, un Fuul Well qui passe de 20Ke à 65Ke par rapport à la 1600, des photopsies qui passent de 3,8µ à 4,6µ et un ADC à 14 bits.
Je précise bien qu'il s'agit d'un choix personnel pour utiliser une caméra aussi bien en fixe que en nomade, la mise en oeuvre est aussi simple que l'APN, je gère le setup avec PRISM10 et tout fonctionne très bien.
Un point important il faut un PC à proximité de la caméra, elle fonctionne bien mieux en USB3 que en USB2, le petit défaut c'est qu'il n'est pas possible de passer par un HUB USB ou un Silex comme j'avais l'habitude.
Reste plus qu'a peaufiner les tests mais je pense que cette caméra a un excellent potentiel.
@+++++
-
Bonjour à tous,
Je reviens sur le forum pour vous présenter un boitier d'alimentation nomade qui intègre (un Pc Tinkerboard ou le Rasbery faut partager) un Hub USB Dlink 7 ports, 4 sorties 12 v, 1 sortie 9 v (pour focuser), 1 sortie 7,8 v (pour APN réglable), 2 sortie 5 V 3A.
L'alimentation 5 volts interne fait 50 w
Pour ceux ont un PC normal, il y a la possibilité d'installer une alimentation 12v/19v 150W
J'ai ajouté un fusible de protection de 10A, et un ventilateur super silencieux et sans vibrations pour refroidir le PC.
Il ne nous reste plus qu'à intégrer le pilotage du focuser (bientôt)
Le boitier se branche sur une batterie 12 v 70Ah pour moi, avec les connecteurs qui vont avec de ce type là :
https://www.achatbatterie.fr/batterie-varta-lfd60-12v-70ah-c100h-decharge-lente-c2x7150164
Il suffit d'un câble d'alimentation 12 v et du câble EQmode pour relier le boitier à la monture (et un câble USB pour ceux qui ont un PC).
La dimensions 200 mm/120 mm/ 75 mm pour 660gr il peut être installé sur la lunette, donc plus câbles qui pendent.
Le prix de revient moins de 90€
Pour celui que je présente en dehors du Tinkerboard je suis à 78€ (avec le Dlink) mais j'ai le fil de câblage, la soudure.
Je prépare le schémas et la liste des composants, c'est facile à réaliser environ 5 heures de montage.
Pour les connecteurs (par 50 pièces), et les convertisseurs tension je les achète chez Aliexpress.
Il serait possible de faire des achat groupés pour diminuer le prix de revient.
Si vous désirez plus d'information n'hésitez pas, tous les commentaires pour améliorer le boîtier seront les bienvenus.
Pour les photos suivez le lien :
https://drive.google.com/drive/folders/0B0jqgeIy0ThjY0pLTjJDN1Q2WXc?usp=sharing
Bon ciel
-
Bonjour à tous,
Je reviens sur le forum pour vous présenter un boitier d'alimentation nomade qui intègre le Tinkerboard (ou le Rasbery faut partager) un Hub USB Dlink 7 ports, 4 sorties 12 v, 1 sortie 9 v (pour focuser), 1 sortie 7,8 v (pour APN réglable), 2 sortie 5 V 3A.
L'alimentation 5 volts interne fait 50 w
J'ai ajouté un fusible de protection de 10A, et un ventilateur super silencieux et sans vibrations pour refroidir le PC.
Il ne nous reste plus qu'à intégrer le pilotage du focuser (bientôt)
Le boitier se branche sur une batterie 12 v 70Ah pour moi.
Il suffit d'un câble d'alimentation 12 v et du câble EQmode pour relier le boitier à la monture.
La dimensions 200 mm/120 mm/ 75 mm pour 660gr il peut être installé sur la lunette, donc plus câbles qui pendent.
Le prix de revient moins de 90€
Pour celui que je présente en dehors du Tinkerboard je suis à 78€ (avec le Dlink) mais j'ai le fil de câblage, la soudure.
Je prépare le schémas et la liste des composants, c'est facile à réaliser environ 5 heures de montage.
Pour les connecteurs (par 50 pièces), et les convertisseurs tension je les achète chez Aliexpress.
Il serait possible de faire des achat groupés pour diminuer le prix de revient.
Si vous désirez plus d'information n'hésitez pas, tous les commentaires pour améliorer le boîtier seront les bienvenus.
Bon ciel
Les photos ici
https://drive.google.com/drive/folders/0B0jqgeIy0ThjY0pLTjJDN1Q2WXc?usp=sharing
-
J'ai un usb focus charge lourde, l'usb sert pour le controle mais il y a une alim 12V pour l'alimentation du moteur pas à pas
Est ce que l'interrupteur sur le haut du boitier de commande est bien vers usb dans ton cas ?
Salut,
Oui j'ai la même configuration, moteur 12v avec alim externe.
-
Je viens de faire un essai en branchant le focuser directement sur le PC
le focuseur est alimenté en 5 V par une alim extérieure et il n'y a pas de HUB le même message d’erreur apparaît ??????????????
Patience patience, c'est la règle, on va y arriver !!!!!!!!!!!!!!!!!!!!!
 :cry:
:cry: -
bon, ça se passe là :
2017-09-10T17:25:20.938 - DEBG - Focus: "Focusing outward..." 2017-09-10T17:25:21.710 - DEBG - EQMod Mount : "dispatch_command: \":j1\", 4 bytes written " 2017-09-10T17:25:21.745 - DEBG - EQMod Mount : "read_eqmod: \"=000080\", 8 bytes read " (...) 2017-09-10T17:25:24.439 - DEBG - EQMod Mount : "dispatch_command: \":d2\", 4 bytes written " 2017-09-10T17:25:24.468 - DEBG - EQMod Mount : "read_eqmod: \"=350680\", 8 bytes read " 2017-09-10T17:25:25.043 - DEBG - Ekos: "Disconnecting INDI devices..."
En gros, le focuser envoie son statut (focusing)
Ensuite la monture fait son job, elle baragouine des trucs,
Et d'un coup, paf, Ekos lache l'affaire.
Il y a peut-être des interactions bizarres entre les deux flux série focuser/monture.
Tu peux indiquer sur quels ports sont branchés la monture et le focuser (les /dev/tty***) ?
Edit :
Rassure-moi : le boitier de l'usb focus est bien branché à une alim dédiée, n'est-ce pas ?
Essaie de le brancher à un autre port USB sans passer par le hub, juste pour voir...
Bonjour,
Oui tout est branché sur un HUB alimenté, ce matin j'ai fait un essai avec un second HUB et c'est le même problème.
J'ai fait une mise à jours de la carte avec Patrick pour voir si le problème persiste la réponse est oui.
J'ai enregistré deux logs de INDI sur le Focuser pour voir le soucis ici
https://drive.google.com/file/d/0B0jqgeIy0ThjNVBnSGVWbzhOaUU/view?usp=sharing
https://drive.google.com/file/d/0B0jqgeIy0ThjbmxaYXpLek9FYVk/view?usp=sharing
Pour l'instant pas de solution est-il possible qu'il y ait un soucis avec le driver Indi du focuseur
A+++
-
Autre question :
les histoires d'USB qui partent en sucette, ça peut aussi être lié à l'alimentation.
Est-ce que tu utilises un hub USB alimenté ?
Essaie aussi de séparer les problèmes :
Teste chaque appareil séparément, entouré de simulateurs pour les autres
genre ccd simulator avec ton focuser et telescope simulator, puis ton Canon avec focuser simulator et telescope simulator, etc...
Petite idée : sur les driver Gphoto (et dérivés Canon/Nikon), on peut régler le focus de l'objectif.
Je n'ai jamais pratiqué, mais ça explique sans doute que tu retrouves ton Canon dans les focuser :
Ce n'est peut-être pas un bug !
Si je branche tous les périphériques sans le focuseur tout fonctionne correctement.
Ce n'est que quand je connecte le focuseur que le problème apparait.
Le hub USB est alimenté 5v 3A c'est un Dlink 7 ports
-
Autre question :
les histoires d'USB qui partent en sucette, ça peut aussi être lié à l'alimentation.
Est-ce que tu utilises un hub USB alimenté ?
Essaie aussi de séparer les problèmes :
Teste chaque appareil séparément, entouré de simulateurs pour les autres
genre ccd simulator avec ton focuser et telescope simulator, puis ton Canon avec focuser simulator et telescope simulator, etc...
Petite idée : sur les driver Gphoto (et dérivés Canon/Nikon), on peut régler le focus de l'objectif.
Je n'ai jamais pratiqué, mais ça explique sans doute que tu retrouves ton Canon dans les focuser :
Ce n'est peut-être pas un bug !
Si je ne connecte pas le focuseur tous les autres périphériques fonctionnent correctement sans soucis.
Mon hub USB est alimenté ( 5VDC 5 A) c'est un Dlink 7 entrées ce qui ce fait de mieux en astro je pense et en fiabilité. Le PC a une alimentation 5VDC 10 A
-
ça fait beaucoup de logs à regarder.
Tu peux nous dire quel est celui qui correspond à un plantage ?
J'ai regardé le dernier (17-19-40)
En dernier à la fin, on dirait que tu prends une image, et que Ekos se déconnecte tout de suite après :
ça correspond à ce que tu as fait ?
Gilles.
Oui c'est exactement ce qui c'est passé, sur le dernier et l'avant dernier aussi.
-
Dans les essais que je mène est-il normal que dans la fenêtre du Focuseur j'ai le choix entre le USB FOCUS V3 et le CANON APN ???????
Est ce qu'il n'y aurait pas un soucis de conflit de port USB ????
Ci-joint le lien pour l'image
https://drive.google.com/file/d/0B0jqgeIy0ThjSjFydmp4cG16Mmc/view?usp=sharing
A+++++
-
Salut,
Ça m'intéresse, car j'ai vraiment trop de câbles !
Salut,
Je pense que vers la mi octobre j'aurais finaliser le boitier et je le mettrais sur le site.
A+++
-
Salut,
Je viens de faire plusieurs essais et je vais essayer d'être clair.
Je connecte tous les équipements.
Sous Kstars je configure les "logs"pour le Focuseur et les autres périphériques.
Je fais fonctionner le focuseur normalement "IN" ""OUT" par 100 pas aucun problème.
Je lance des poses avec l'APN pas de soucis.
Au bout de 5 minutes je n'ai plus la main sur le focuseur les action sur "IN" "OUT" ne font pas bouger le focus, mais je peux toujours utiliser l'APN
Au bout d'un moment je n'ai plus la main sur le PC
Je reboute le système et je refait la même manipulation que ci-dessus au bout de 5 minutes idem, mais je ne fais plus de manipulation je déconnecte les équipements, je relance Indi et là je m’aperçois que le focuseur est reconnu comme l'APN (voir la photo jointe)
https://drive.google.com/file/d/0B0jqgeIy0ThjX0RjZTMwVWVMR1k/view?usp=sharing
Dès que je fais de nouvelles manipulations sur l'APN ou le Focuseur je plante le PC
Je mais le lien pour les fichiers logs
https://drive.google.com/drive/folders/0B0jqgeIy0Thjb1BQRndrZEU4R1k?usp=sharing
J'espère que mon explication est claire.
A+++++
-
Re,
Quand je branche et débranche le Focuseur voici le message :
834967] usb 1-1.2.4.4: USB disconnect, device number 8
[ 410.493391] usb 1-1.2.4.4: new full-speed USB device number 10 using dwc2
[ 410.596050] usb 1-1.2.4.4: New USB device found, idVendor=0461, idProduct=0033
[ 410.596070] usb 1-1.2.4.4: New USB device strings: Mfr=1, Product=2, SerialNumber=0
[ 410.596092] usb 1-1.2.4.4: Product: USB_Focus
[ 410.596104] usb 1-1.2.4.4: Manufacturer: USB̔USB_F
[ 410.597446] cdc_acm 1-1.2.4.4:1.0: ttyACM0: USB ACM device
nafa@tinkerboard:~$
-
1:1.255/0003:0BDA:481A.0001/input/input1
[ 5.867866] usb 1-1.2.4.1: New USB device found, idVendor=04a9, idProduct=3218
[ 5.867877] usb 1-1.2.4.1: New USB device strings: Mfr=1, Product=2, SerialNumber=0
[ 5.867890] usb 1-1.2.4.1: Product: Canon Digital Camera
[ 5.867897] usb 1-1.2.4.1: Manufacturer: Canon Inc.
[ 5.928156] hid-generic 0003:0BDA:481A.0001: input,hiddev0,hidraw0: USB HID v1.11 Device [Generic USB Audio] on usb-ff500000.usb-1/input255
[ 5.945370] usb 1-1.2.4.2: new high-speed USB device number 6 using dwc2
[ 6.047509] usb 1-1.2.4.2: New USB device found, idVendor=03c3, idProduct=120a
[ 6.047523] usb 1-1.2.4.2: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[ 6.047531] usb 1-1.2.4.2: Product: ASI120MM
[ 6.047538] usb 1-1.2.4.2: Manufacturer: ZWOptical company
[ 6.047545] usb 1-1.2.4.2: SerialNumber: 00000
[ 6.125079] usb 1-1.2.4.3: new full-speed USB device number 7 using dwc2
[ 6.241255] usb 1-1.2.4.3: New USB device found, idVendor=0403, idProduct=6001
[ 6.241276] usb 1-1.2.4.3: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[ 6.241298] usb 1-1.2.4.3: Product: TTL232R-5V
[ 6.241316] usb 1-1.2.4.3: Manufacturer: FTDI
[ 6.241335] usb 1-1.2.4.3: SerialNumber: AL00A77I
[ 6.244371] ftdi_sio 1-1.2.4.3:1.0: FTDI USB Serial Device converter detected
[ 6.244596] usb 1-1.2.4.3: Detected FT232RL
[ 6.245506] usb 1-1.2.4.3: FTDI USB Serial Device converter now attached to ttyUSB0
[ 6.281075] EXT4-fs (mmcblk0p1): mounted filesystem with writeback data mode. Opts: (null)
[ 6.325035] usb 1-1.2.4.4: new full-speed USB device number 8 using dwc2
[ 6.428317] usb 1-1.2.4.4: New USB device found, idVendor=0461, idProduct=0033
[ 6.428345] usb 1-1.2.4.4: New USB device strings: Mfr=1, Product=2, SerialNumber=0
[ 6.428364] usb 1-1.2.4.4: Product: USB_Focus
[ 6.428382] usb 1-1.2.4.4: Manufacturer: USB̔USB_F
[ 6.430385] cdc_acm 1-1.2.4.4:1.0: ttyACM0: USB ACM device
[ 6.485856] systemd[1]: System time before build time, advancing clock.
[ 6.488771] systemd[1]: Failed to insert module 'autofs4': No such file or directory
[ 6.532374] systemd[1]: systemd 229 running in system mode. (+PAM +AUDIT +SELINUX +IMA +APPARMOR +SMACK +SYSVINIT +UTMP +LIBCRYPTSETUP +GCRYPT +GNUTLS +ACL +XZ -LZ4 +SECCOMP +BLKID +ELFUTILS +KMOD -IDN)
[ 6.533811] systemd[1]: Detected architecture arm.
[ 6.558344] systemd[1]: Set hostname to <tinkerboard>.
[ 7.007757] systemd[1]: Listening on udev Kernel Socket.
[ 7.025419] systemd[1]: Reached target Remote File Systems (Pre).
[ 7.045269] systemd[1]: Reached target Remote File Systems.
[ 7.066153] systemd[1]: Listening on /dev/initctl Compatibility Named Pipe.
[ 7.088116] systemd[1]: Created slice User and Session Slice.
[ 7.106933] systemd[1]: Listening on Journal Socket.
[ 7.126489] systemd[1]: Listening on Syslog Socket.
[ 7.146445] systemd[1]: Listening on Journal Socket (/dev/log).
[ 7.167764] systemd[1]: Created slice System Slice.
[ 7.237710] systemd[1]: Starting Load Kernel Modules...
[ 7.265475] systemd[1]: Starting Create list of required static device nodes for the current kernel...
[ 7.289653] systemd[1]: Starting Set console keymap...
[ 7.305422] systemd[1]: Reached target Slices.
[ 7.325705] systemd[1]: Listening on udev Control Socket.
[ 7.345472] systemd[1]: Reached target Encrypted Volumes.
[ 7.345694] RTL871X: module init start
[ 7.345703] RTL871X: rtl8723bs BT-Coex version = BTCOEX20151223-654a
[ 7.365367] systemd[1]: Started Dispatch Password Requests to Console Directory Watch.
[ 7.385359] systemd[1]: Started Forward Password Requests to Wall Directory Watch.
[ 7.385664] RTL871X: hal_com_config_channel_plan chplan:0x20
[ 7.388386] RTL871X: rtw_ndev_init(wlan0) if1 mac_addr=f0:03:8c:2d:93:7f
[ 7.389336] RTL871X: module init ret=0
[ 7.445172] systemd[1]: Mounting Debug File System...
[ 7.466986] systemd[1]: Listening on fsck to fsckd communication Socket.
[ 7.486303] systemd[1]: Starting Remount Root and Kernel File Systems...
[ 7.498885] EXT4-fs (mmcblk0p1): re-mounted. Opts: commit=600,errors=remount-ro
[ 7.507375] systemd[1]: Mounting POSIX Message Queue File System...
[ 7.525503] systemd[1]: Created slice system-serial\x2dgetty.slice.
[ 7.545270] systemd[1]: Started Trigger resolvconf update for networkd DNS.
[ 7.606328] systemd[1]: Starting Nameserver information manager...
[ 7.626488] systemd[1]: Reached target Paths.
[ 7.645186] systemd[1]: Reached target User and Group Name Lookups.
[ 7.670002] systemd[1]: Starting Restore / save the current clock...
[ 7.692235] systemd[1]: Mounted POSIX Message Queue File System.
[ 7.705298] systemd[1]: Mounted Debug File System.
[ 7.726357] systemd[1]: Started Load Kernel Modules.
[ 7.769052] systemd[1]: Started Create list of required static device nodes for the current kernel.
[ 7.799450] systemd[1]: Started Set console keymap.
[ 7.820730] systemd[1]: Started Remount Root and Kernel File Systems.
[ 7.906392] systemd[1]: Started Restore / save the current clock.
[ 7.928904] systemd[1]: Started Nameserver information manager.
[ 7.977515] systemd[1]: Time has been changed
[ 8.164022] systemd[1]: Reached target Network (Pre).
[ 8.226004] systemd[1]: Activating swap /var/swap...
[ 8.263081] systemd[1]: Starting Load/Save Random Seed...
[ 8.297776] systemd[1]: Starting udev Coldplug all Devices...
[ 8.317408] systemd[1]: Starting Create Static Device Nodes in /dev...
[ 8.337260] systemd[1]: Mounting FUSE Control File System...
[ 8.356802] systemd[1]: Mounting Configuration File System...
[ 8.362960] Adding 131068k swap on /var/swap. Priority:-1 extents:1 across:131068k SS
[ 8.376679] systemd[1]: Starting Apply Kernel Variables...
[ 8.397155] systemd[1]: Mounted FUSE Control File System.
[ 8.415150] systemd[1]: Mounted Configuration File System.
[ 8.435977] systemd[1]: Activated swap /var/swap.
[ 8.462690] systemd[1]: Started Load/Save Random Seed.
[ 8.523806] systemd[1]: Started Create Static Device Nodes in /dev.
[ 8.546198] systemd[1]: Started Apply Kernel Variables.
[ 8.664073] systemd[1]: Started udev Coldplug all Devices.
[ 8.728329] systemd[1]: Reached target Local File Systems (Pre).
[ 8.807365] systemd[1]: Mounting /tmp...
[ 8.835593] systemd[1]: Starting udev Kernel Device Manager...
[ 8.843835] systemd[1]: Reached target Swap.
[ 8.874634] systemd[1]: Mounted /tmp.
[ 8.945927] systemd[1]: Reached target Local File Systems.
[ 9.025753] systemd[1]: Starting Set console font and keymap...
[ 9.047190] systemd[1]: Starting Armbian enhanced Log2Ram...
[ 9.070221] systemd[1]: Starting Raise network interfaces...
[ 9.090332] cfg80211: World regulatory domain updated:
[ 9.090342] cfg80211: DFS Master region: unset
[ 9.090346] cfg80211: (start_freq - end_freq @ bandwidth), (max_antenna_gain, max_eirp), (dfs_cac_time)
[ 9.090353] cfg80211: (2402000 KHz - 2472000 KHz @ 40000 KHz), (N/A, 2000 mBm), (N/A)
[ 9.090358] cfg80211: (2457000 KHz - 2482000 KHz @ 40000 KHz), (N/A, 2000 mBm), (N/A)
[ 9.090363] cfg80211: (2474000 KHz - 2494000 KHz @ 20000 KHz), (N/A, 2000 mBm), (N/A)
[ 9.090369] cfg80211: (5170000 KHz - 5250000 KHz @ 80000 KHz, 160000 KHz AUTO), (N/A, 2000 mBm), (N/A)
[ 9.090374] cfg80211: (5250000 KHz - 5330000 KHz @ 80000 KHz, 160000 KHz AUTO), (N/A, 2000 mBm), (0 s)
[ 9.090381] cfg80211: (5490000 KHz - 5730000 KHz @ 160000 KHz), (N/A, 2000 mBm), (0 s)
[ 9.090390] cfg80211: (5735000 KHz - 5835000 KHz @ 80000 KHz), (N/A, 2000 mBm), (N/A)
[ 9.090396] cfg80211: (57240000 KHz - 63720000 KHz @ 2160000 KHz), (N/A, 0 mBm), (N/A)
[ 9.103704] systemd[1]: Started Entropy daemon using the HAVEGE algorithm.
[ 9.106276] IPVS: Creating netns size=1496 id=1
[ 9.129444] systemd[1]: Started udev Kernel Device Manager.
[ 9.366399] systemd[1]: Started Set console font and keymap.
[ 9.393721] systemd[1]: Created slice system-getty.slice.
[ 9.427470] systemd[1]: Reached target Sound Card.
[ 9.565827] systemd[1]: Started ifup for eth0.
[ 9.641194] systemd[1]: Found device /sys/subsystem/net/devices/eth0.
[ 9.659732] systemd[1]: Found device /dev/ttyS2.
[ 9.747214] systemd[1]: Listening on Load/Save RF Kill Switch Status /dev/rfkill Watch.
[ 9.845805] systemd[1]: Starting Load/Save RF Kill Switch Status...
[ 9.885094] [bT_RFKILL]: ENABLE UART_RTS
[ 9.888584] systemd[1]: Started Raise network interfaces.
[ 9.995000] [bT_RFKILL]: DISABLE UART_RTS
[ 9.995033] [bT_RFKILL]: bt turn on power
[ 10.002382] systemd[1]: Started Load/Save RF Kill Switch Status.
[ 10.017148] systemd[1]: Started Armbian enhanced Log2Ram.
[ 10.095344] systemd[1]: Starting Journal Service...
[ 10.218456] systemd[1]: Started Journal Service.
[ 10.327989] systemd-journald[671]: Received request to flush runtime journal from PID 1
[ 12.256266] IPVS: Creating netns size=1496 id=2
[ 12.619296] IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready
[ 12.633072] IPv6: ADDRCONF(NETDEV_UP): wlan0: link is not ready
[ 13.677608] IPv6: ADDRCONF(NETDEV_UP): wlan0: link is not ready
[ 13.981170] IPv6: ADDRCONF(NETDEV_UP): wlan0: link is not ready
[ 14.025255] RTL871X: assoc success
[ 14.025626] IPv6: ADDRCONF(NETDEV_CHANGE): wlan0: link becomes ready
[ 15.623201] dwhdmi-rockchip ff980000.hdmi: Rate 0 missing; compute N dynamically
[ 15.632351] dwhdmi-rockchip ff980000.hdmi: Rate 0 missing; compute N dynamically
[ 16.005432] rk_gmac-dwmac ff290000.ethernet eth0: Link is Up - 100Mbps/Full - flow control rx/tx
[ 16.005461] IPv6: ADDRCONF(NETDEV_CHANGE): eth0: link becomes ready
nafa@tinkerboard:~$
-
Salut à tous,
Je me présente, Jacques Croiziers pour ceux qui ne connaissent pas mon pseudo.
Avec l'aide de Padut je teste la carte Tinkerboard avec Kstar
L'ensemble fonctionne plutôt bien, astrométrie, imageur, guidage à valider.
Concernant la mise au point j'utilise un USB Focus V3 et celui-ci pose un petit soucis.
La connexion ce fait bien, deux ou trois manipulations du Focuseur et puis il plante la carte, plus aucun accès.
Est-ce que quelqu'un a rencontré ce problème, Patrick a fait remonté l'information mais pas de réponse pour l'instant.
Pour information je prépare un petit boitier avec les alimentations nécessaires au raccordement de tous les équipements, il intégrera en plus la carte Tinkerboard, et le UB Dlink 7 entrées.
Merci pour vos réponses.

-
Bonjour,

Je viens d'installer Backyardeos v3 sur mon PC avec Windoss 7 et je n'arrive pas à communiquer avec mon APN Canon 600D (alors que avec EOS Utility je fonctionne correctement)
Je suis branché sur un port USB avec le câble de connexion Canon
Quel q'un a t'il une idée du problème.
Merci Jacques
-
Bonjour,

J'ai enfin réussi la mise en station et l'initialisation jeudi soir et j'ai pu chouter M42
Pour les débutants je vais faire un petit tutoriel pour ne pas confondre initialisation et mise en station.
Jacques:be:
-
Bonjour à tous:),
Et merci à Alain (Breal), en effet la méthode fonctionne, je pense que je confondais mise en station polaire et initialisation.
J'ai fait l'essai ce matin dans mon bureau et ça fonctionne, après la mise en station polaire (à peu prés) et la position d'initialisation le réglage sur la première étoile était bon.
Merci encore pour vos conseils, ne pas confondre vitesse et précipitation.
Jacques:be:
QUi sera présent en Mai aux RAPs ?
dans Raspberry, Tinkerboard, etc...
Posté
Salut à tous,
Très bon cru ce 20° anniversaire et des échanges sympa avec beaucoup de convivialité.
Un petit souvenir de l'équipe et un clin d’œil à Gilles
@++++
Jacques