

Marquis13
-
Compteur de contenus
20 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par Marquis13
-
-
Bonjour Denis, j'ai mis une rési
il y a 30 minutes, denis-mgt a dit :Bonjour, Marquis13 pas de problème pour les résistance de 1W tu as de la marge.
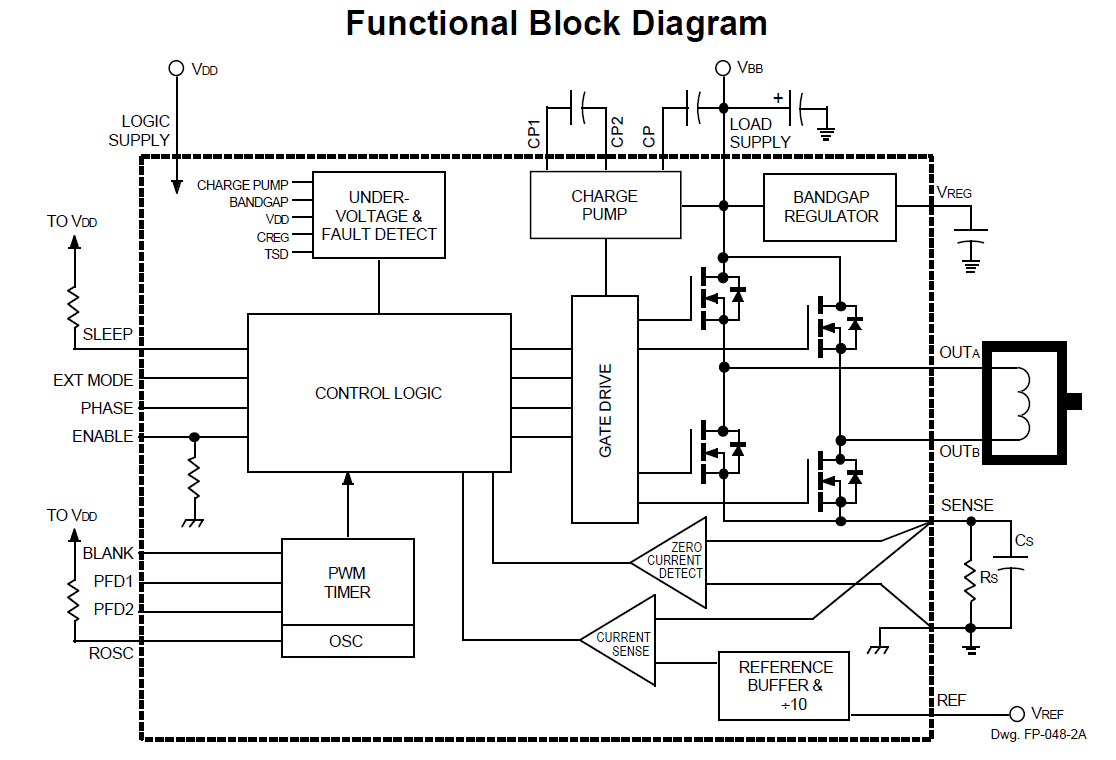
Selon la Doc ALLEGRO A3959SLBT
Le temporisateur PWM est basé sur un oscilateur réglé par une résistance connectée à partir du ROSC terminal à VDD.
La valeur typique de 4MHz est définie avec une résistance de 51 kΩ. la plage admissible de la résistance est de 20 kΩ à 100 kΩ.
Pour le potentiomètre sur ROSC pour ajuster la fréquence de vitesse des moteurs.
Ci je comprend bien tu as à supprimer la résistance de 51 kΩ, quelle plage la tu mis avec le potentiomètre ?
Bonjour, j'ai mis une résistance de 20K en série avec un petit potentiomètre de 75K
-
Le 08/05/2020 à 21:59, denis-mgt a dit :
Concepts sur les circuits analogiques élémentaires et la loi d’Ohm
La loi d’Ohm permet d’obtenir différentes grandeurs
- U la tension aux bornes de la résistance .
- I l’intensité du courant qui circule à travers la résistance .
- R la valeur de la résistance.
- W Puissance en Watts
- sous la forme U = R × I, elle permet de calculer la tension lorsque la résistance et l’intensité sont connues.
- sous la forme I = U / R, elle permet de calculer l’intensité lorsque la tension et la résistance sont connues.
- sous la forme R = U / I, elle permet de calculer la résistance lorsque la tension et l’intensité sont connues.
- sous la forme W = U × I, elle permet de calculer la puissance lorsque la tension et l’intensité sont connues.
Oui, la résistance RS "Résistor Sense" (résistance de détection de courant) n'est pas en analogique mais en fonction logique.
tu es dans le juste. Ce qui nous donne bien la formule suivante RS = U/I trip, soit 0,5/I = 0,5/0,73A = 0,680Ω.
Le courant fourni par la carte au moteur est d'environ 0,80 A / phase (± 0.06mA).
En ajoutant une résistance en parallèle voir même sont remplacement sur la Tension de détection de l'allegro (SENSE Voltage).
Avec une résistance de remplacement de 0.500Ω 1A par phases (± 0.06mA).
Avec une résistance de remplacement de 0.450Ω 1.1A par phases (± 0.06mA).
Avec une résistance de remplacement de 0.400Ω 1.25A par phases (± 0.06mA).
Avec une résistance en parallèle de 2Ω 1A par phases (± 0.06mA).
Avec une résistance en parallèle de 1.5Ω 1.1A par phases (± 0.06mA).
Avec une résistance en parallèle de 1Ω 1.25A par phases (± 0.06mA).
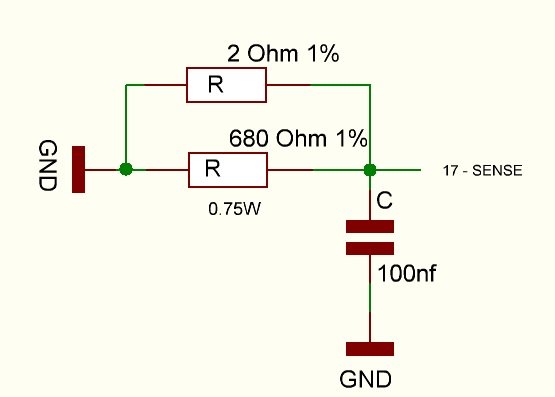
Cas de 2 résistances différentes en parallèle.
R1=0.680Ω et R2=2Ω, R=(0.680*2)/(0.680+2) = 300/40 = 0.507Ω. Dans tous les cas la résistance équivalente à un groupement de résistances en parallèle est inférieure à la plus faible de ces résistances.
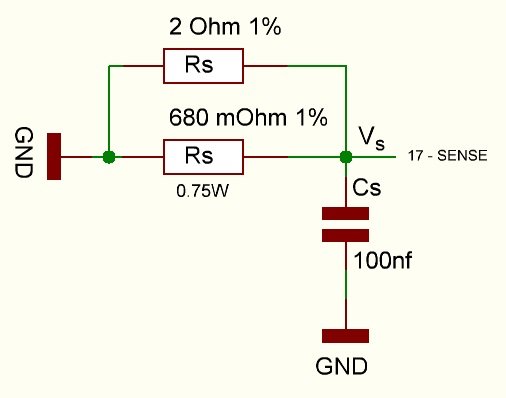
il y a une erreur sur le schéma précédent la résistance et de 0.680Ω non pas 680Ω
Voici le bon schéma

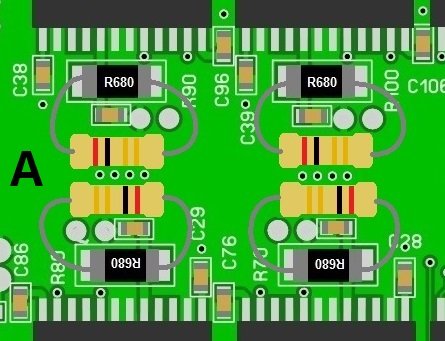
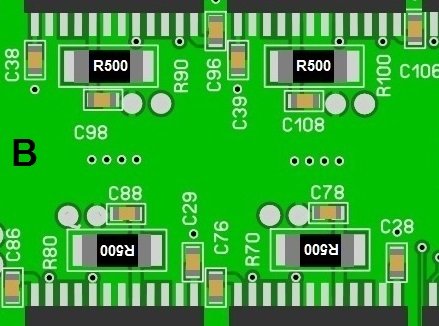
Sur les 2 figures A et B La valeur des résistances RS: R70, R80, R90 et R100 est de 0,500Ω cela me donne 1A par phases (± 0.06mA).
Ex: Image A résistance en parallèle R70=0.680Ω et R70a=2Ω = 500 mOhm
Ex: Image B remplacement des résistances par une R500 = 0.500 mOhm
Résistances de la série: E96. Valeurs dans la série E96 (± 1 %)
La puissance dissipé, par la ou les résistance, est de 500 mW par phase, au lieu des 370 mW avec une résistance de 0.680 mOhm.
Puissance par résistance dans ton cas 530mW
Bonsoir Denis, Non j'ai mis des 1W, j'ai aussi monté un potentiomètre sur ROSC pour ajuster la fréquence, ce qui me permet d'avoir la main sur la vitesse moteurs.
Ben à toi
-
Le 13/04/2020 à 12:23, denis-mgt a dit :
MODIFICATION DU COUPLE MOTEUR PLUS GRAND QUE CELUI D'ORIGINE
Cette de modification et faite pour des moteurs avec un couple > 0.40Nm à < 0.65Nm.
Le courant fourni par la carte au moteur est d'environ 0,80 A / phase (± 0.06mA).
La modification peut être fait sur un seul axe (RA) par exemple.
En ajoutant une résistance en parallèle voir même sont remplacement sur la Tension de détection de l'allegro (SENSE Voltage)
Avec une résistance de 2Ω 1A par phases (± 0.06mA).
Avec une résistance de 1.5Ω 1.1A par phases (± 0.06mA).
Avec une résistance de 1Ω 1.25A par phases (± 0.06mA).
Un courant plus important provoque une hausse de température des driver moteur, un dissipateur thermique sera nécessaire sur ceux-ci.
Le changement de courant nécessite un renforcement de celui-ci, avec changement de composant.
- d'un condensateur 2200 µF, 35 V Réf: EEUHD1V222.
- et d'une Inductance toroïdal 100 µH, 5 A, 0.035 ohm, ± 20% Réf: 747070
Exemple avec une résistance de 2 Ohm (RESISTANCE EN PARALLELE)
Cela reste de la théorie
Bonjour, je suis de retour après cette longue absence, faute de PC sous la main pour finir le tuto concernant mon projet de modif du Nexstar 11 GPS. J’utilise pour le moment une tablette pour apporter qlq corrections. Comme on peux le voir ci-dessous, la résistance RS "Résistor Sense" (résistance de détection de courant) n'est pas en analogique mais en fonction logique. Sa valeur se calcul suivant la formule U/I, sauf qu'en notre ce cas c'est la tension logique qu'il faut prendre en compte , ce qui nous donne la formule suivante RS = U/I trip, soit 0,5/I = 0,5/0,73A = 0,680Ω ce qui correspond a une résistance R680, (0,5/R pour le courant, 0,5/0,47 = 1,063A soit pour exemple une R470 ou 0,47Ω pour mon cas, suivant choix du moteur Nema14 0,4Nm, 1,5A limité à 1A volontairement pour ne pas trop solliciter la mécanique.
Nota: La valeur des résistances RS: R70, R80, R90 et R100 est de 0,680Ω 😀
Les beaux jours, comme la fin du confinement, et avec ceux-ci un nouveau PC puis la reprise de mon tuto sur la modif du Nexstar 11.
Cdt
-
 1
1
-
Bonjour à tous, et que dire de ce superbe travail. Merci encore à son auteur. J'ai de mon coté procédé à la MODIFICATION de mon Nexstar 11 GPS en Skywatcher, en implantant une carte mère EQ6 Pro Goto, après avoir supprimé toutes les cartes électroniques, les moteurs CC, réducteurs, etc du Nexstar. Un tuto de la modification générale électronique et mécanique) est en phase de rédaction, ce tuto sera dans la rubrique "les Bricoleurs".
Si besoins dans le domaine électronique, suis dispo.

-
Bonsoir, bonjour et merci pour l'info.
Je ne suis plus sur la recherche de matos ou infos en lien avec Celestron, comme dit sur mon premier post, je viens de modifier ou plus tot transformer mon télescope et fonctionne parfaitement. La gestion du télescope s'en trouve beaucoup plus simple, le guidage, suivi sidérale et Goto sont parfait. L'électronique comme la gestion des moteur, s'en trouve aussi peu gourmande en énergie ;-). Je suis surpris par la simplicité de la modification et le faible coup de celle-ci. Il me reste plus qu'à cerner le fonctionnement de la carte GPS, afin de pouvoir bancher et utiliser celle-ci avec la carte Skywatcher.
A bientôt donc pour un résumé en photos etc..
Marquis13
-
Bonjour à tous,
pour des raisons techniques et financières, suite aux différents problèmes de communications entre cartes, erreurs furtives intempestives, couts de la moindre pièces chez Celestron. J'ai commencé la modification de toute l'architecture (soft et hard), de mon Celestron Nexstar 11 GPS en suppriment les cartes électroniques, de manière à gérer le scop avec une seule et unique carte électronique (EQ6 de Skywatcher).
Je compte bien sur vous faire part de la modification, au travers de photos et explications diverses, tant dans les domaines mécaniques qu’électroniques. Pour ceux dont le télescope est un Skywatcher (EQ5, EQ6, etc) ou équivalent, je montrerai comment améliorer ou modifier la carte électronique en toute simplicité, pour adapter les valeurs de résistance de mesure de courant après remplacement des moteurs pas à pas, ou comment ajuster la vitesse de l'horloge avec incidence directe sur la vitesse des moteurs, afin d’améliorer par exemple: les vitesses de suivi. L'ensemble sera commandé en wifi par une Tablette Samsung Galaxy Tab A6 (SynScan Pro et SkySafari 6 Pro)
Éléments supprimées:
1 Raquette
1 Carte série
1 Carte moteurs
2 Moteurs CC: AD et DEC
2 Réducteurs de vitesse 62:1
Câbles divers
Prises diverses
Élément conservé:
1 Antenne GPS
1 Carte GPS
1 tube de 300mm
1 fourche
Nouveaux éléments:
1 Carte électronique EQ6 pro Skywatcher
2 Moteurs pas à pas: Nema14: 40Ncm, 1,5A, 4,2V (ref: 14HS20-1504S)
2 Poulies GT2: 12 dents, pas 2mm, largeur 10mm
2 Poulies GT2: 44 dents, pas 2mm, largeur 15mm
2 courroies de 140mm, 70 dents, pas 2mm, largeur 9mm
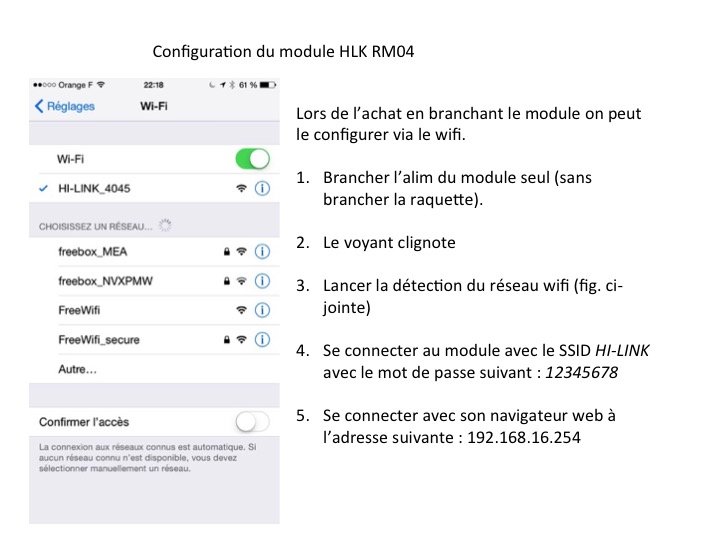
1 Module WIFI DT-06 ESP8285, ou ESP8266 (ou HLK-RM04)
1 Disjoncteur 4A réarmable
1 connecteur mini USB
1 DB9 male
1 DB9 femelle
Marquis13
-
Rebonjour,
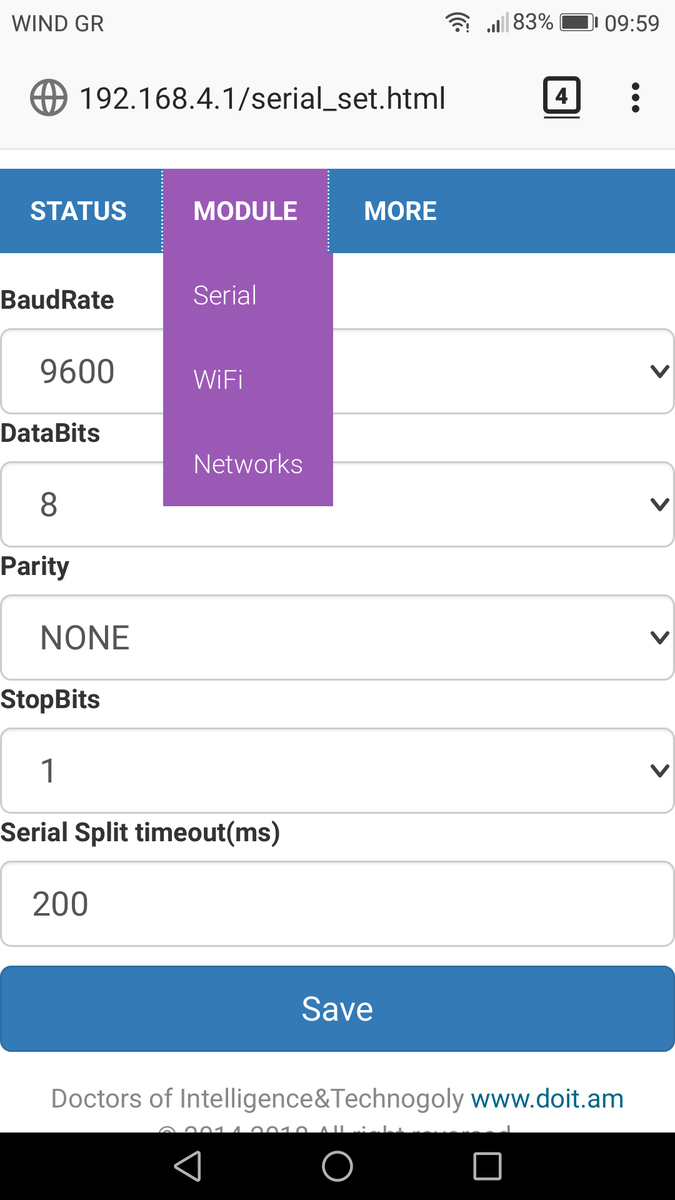
je vous fait part d'un moyen simple est efficace pour résoudre les coupures Wifi intempestives entre monture et tablette (ou smartphone) si le cas pour certains d'entre vous. Bien sur cela peut être différent suivant le type de module utilisé*.
Après connexion au serveur (suivant l’adresse propre a votre module TTL WIFI), comme sur la photo ci-dessous:
1 allez dans MORE,
2 cliquez sur RESTOR pour remettre le module en mode usine (ce qui supprime tout défaut dans celui-ci)
3 revenir sur MODULE
4 refaire les paramétrés nécessaire, pour (Serial), Wifi et Networks suivi d'un SAVE
5 revenir sur MODULE et faire un RESTART
5 se reconnecter au wifi et aux softs puis à la monture
6 ;-)) plus de coupures
*Attention, les différents paramétrés déposes, de ci et la suivant les divers échanges, sont propres a leurs modules respectifs.
-
Bonjour et merci a TOUS pour vos échanges et apports.
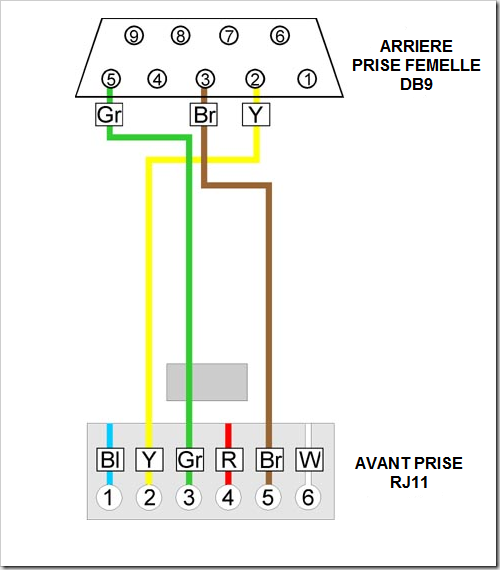
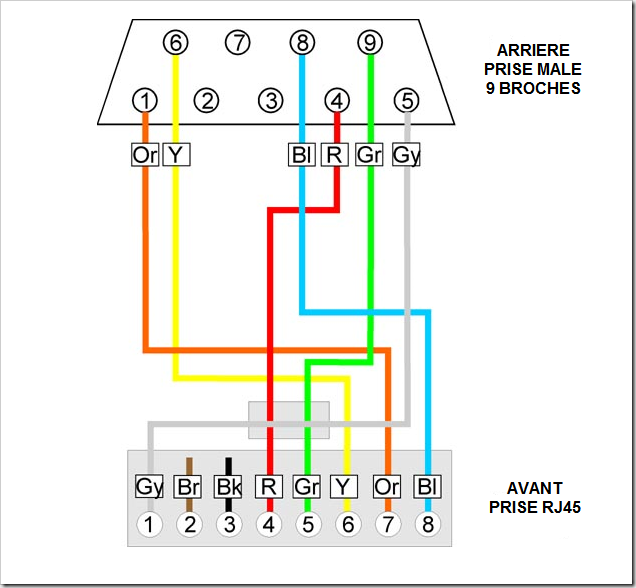
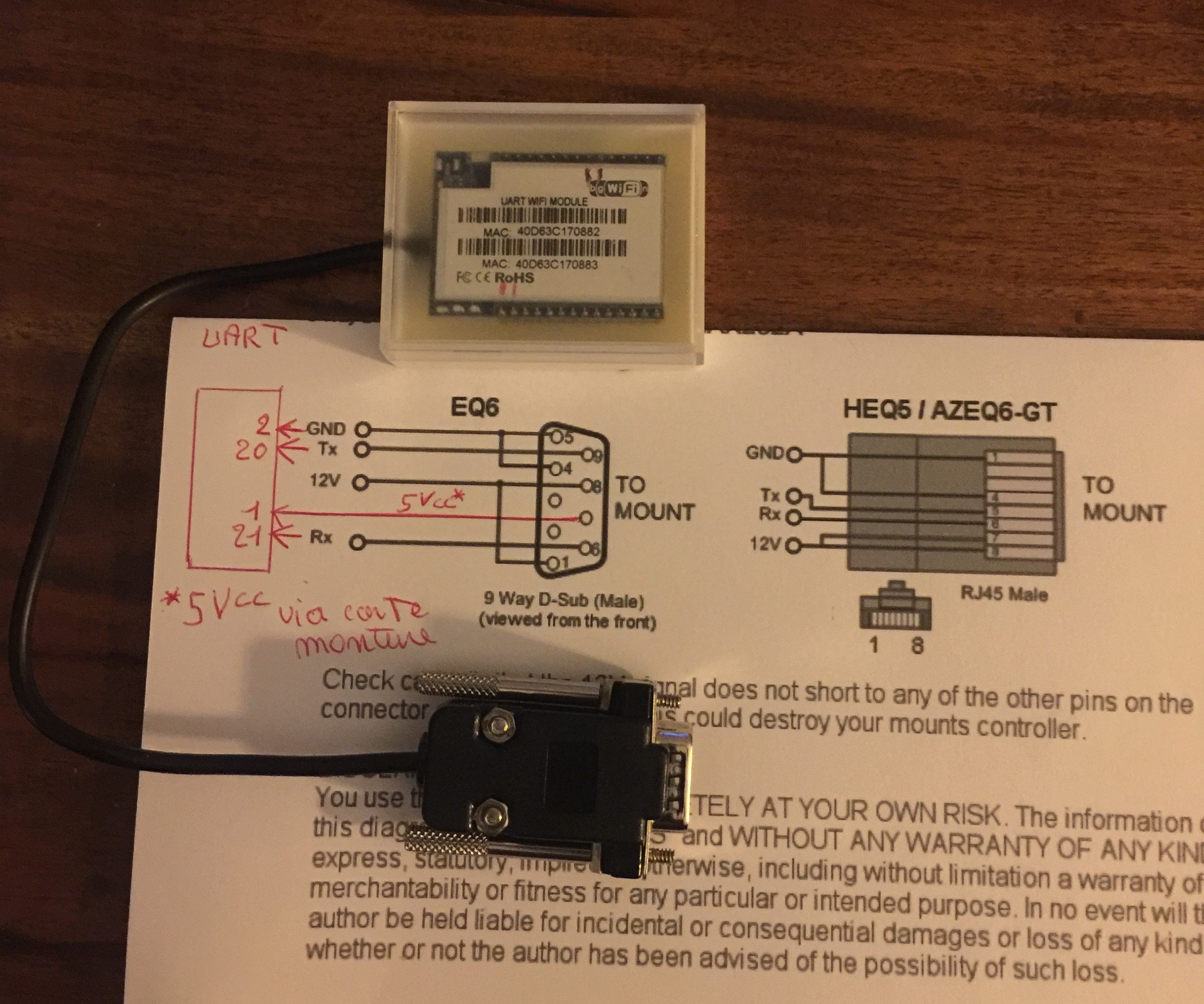
En réponse à FIXOO, le 5Vcc est branché sur la borne 7 de la DB9 de la monture pas sur la 5, ci-dessous 2 schémas pour du brochage des différentes prises, comme on peut le voir la broche 2, 3 et 7 sont libres:
-
Il y a 2 heures, carosegnior a dit :
bonjour
petit retour en arriere
je viens de tester cette solution pas à pas mais j'ai toujours un message d'erreur dans skysafari
pour info j'ai une HEQ5 goto.
faut il mettre la raquette en mode communication pc ou pas
merci d'avance pour le retour
cdlt
V
carosegnior
En principe mettre la raquette en mode RS232 (voir post en amont), j'imagine que tu as le module HLK-RM04
Fixoo,
Fixoo, autres précisions sur le régulateur
"Le L7805ACD2T-TR est un régulateur de tension positif, 3 broches, tension de sortie fixe, utilisable dans un large éventail d'applications. Ce régulateur peut offrir une régulation sur carte, éliminant ainsi les problèmes de distribution associés à une régulation à point unique. Il utilise une limitation de courant interne, un arrêt thermique et une aire de fonctionnement sécurisée, ce qui le rend pratiquement indestructible."
A mon sens, il faut éviter les régulateurs en boitier TO 220 passe partout (chauffent trop) ;-(
-
-
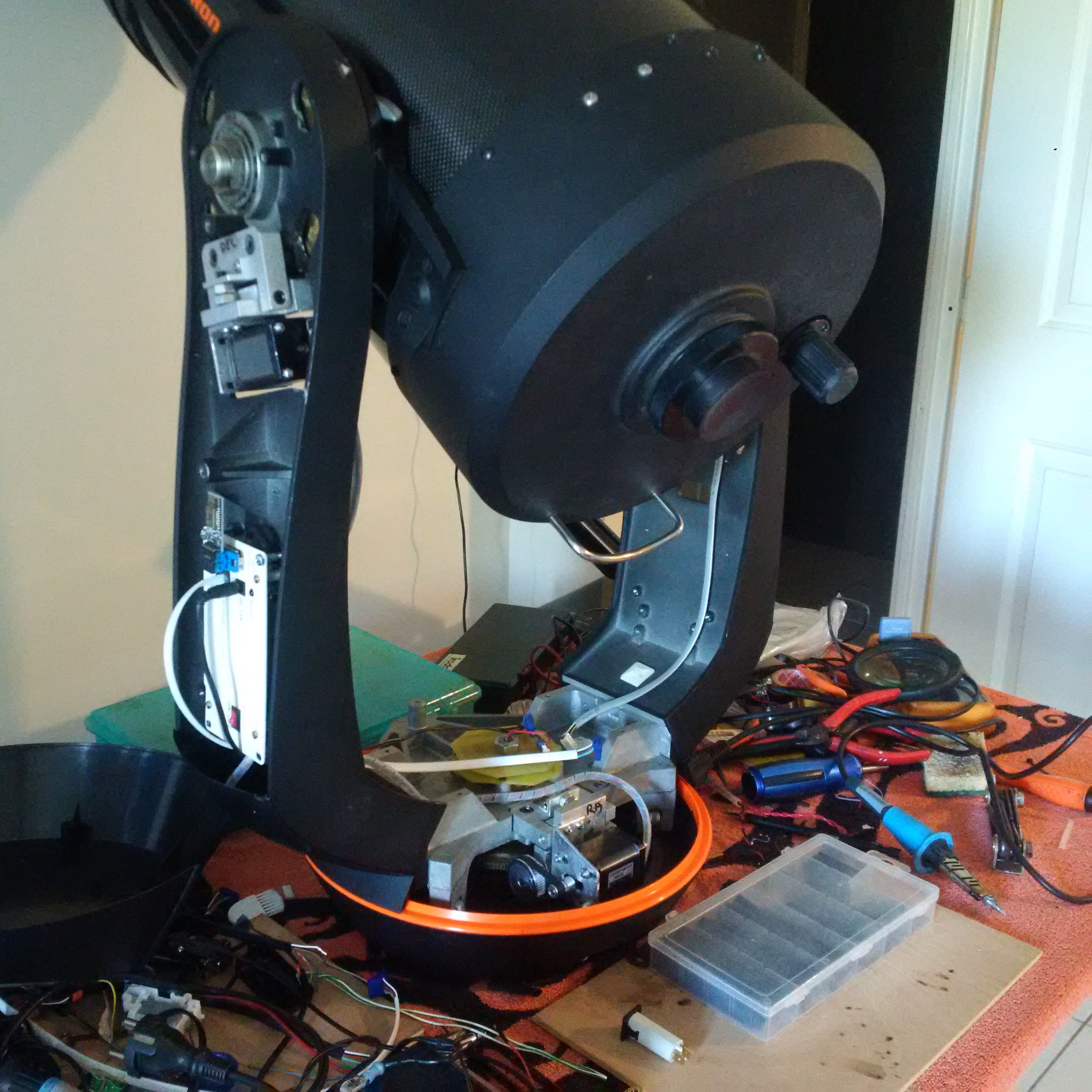
Bonsoir Fixoo, désolé pour mon silence. Voici mon application, le brochage est sur la photo en rouge, je n'utilise pas le circuit imprimé mais uniquement l'UART (Microcontrôleur) du module HLK-RM04 comme tu peux le voir sur la photo, il en va de même que pour les autres ESP8266 et le tout dernier EPS8285 (mon préféré par sa petite taille et performances).
Ce montage convient a toutes les montures sans exception, seules les prise (DB9 ou RJ45) font la différence 😉
Le 5Vcc et récupéré sur celui de la carte mère de la monture via la broche 7 de la DB9 restant libre.
CDT
-
Bonjour,
revoir tes branchements, mais aussi l'image jointe. En effet " Unknown ssid " signifie que le module wifi est non localisé, pas trouvé?. Inspires toi de l'image jointe, en repartant du point 1 à 5, voir surtout les points 4 et 5.
CDT
message pour Fixoo
-
Bonjour, tout est dit:
The Sky-Watcher/Orion SynScan hand controller is now available as an app on your smart device. Use this app to control the AZ GTi mount or other Sky-Watcher/Orion telescope mounts fitted with a SynScan Wi-Fi adapter.
This is the Pro version of the SynScan app and is suited for expert users using equatorial mounts.
This app supports ASCOM on Windows PC. Driver can be downloaded from www.skywatcher.com
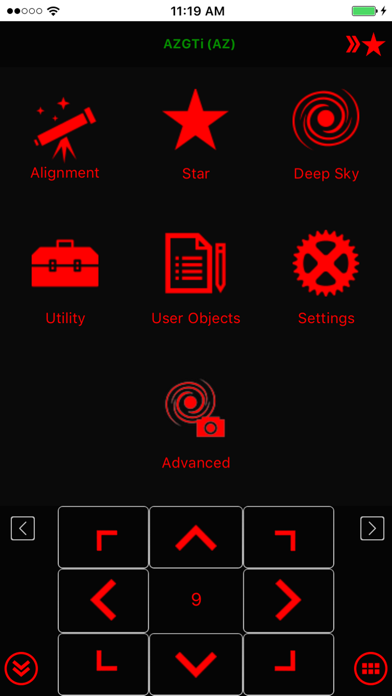
Foctionne sur IOS, Android et Windows
-
Bonjour,
mettre du cellophane (faire 2 ou 3 tours, sans couvrir les cotés, de manière a protéger le dessus et dessous uniquement.
CDT
-
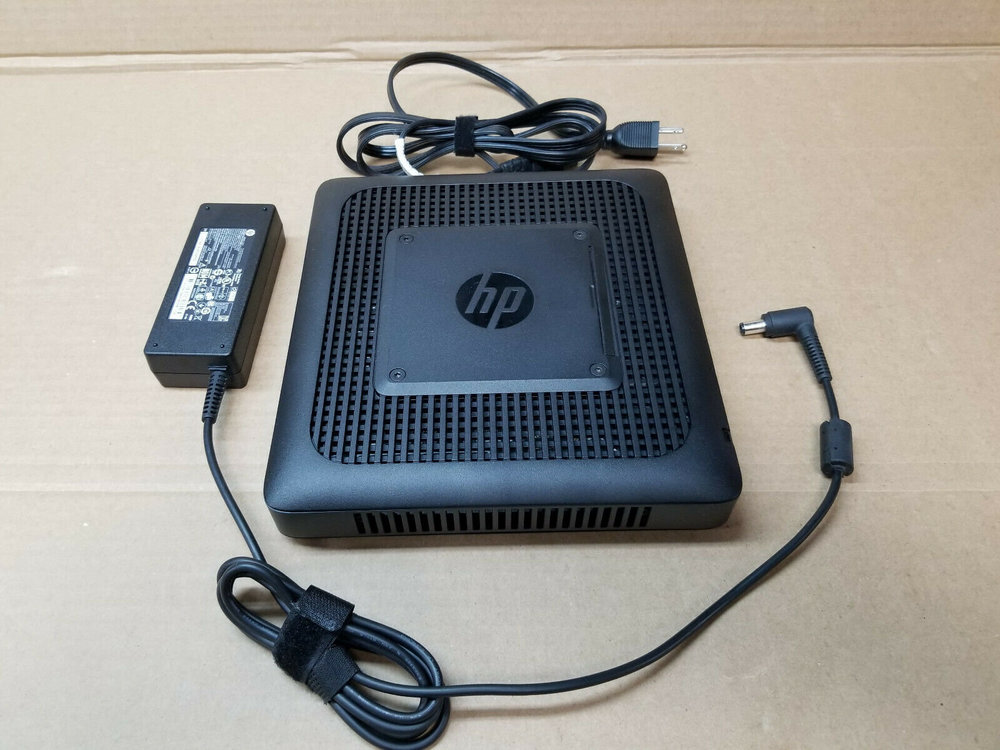
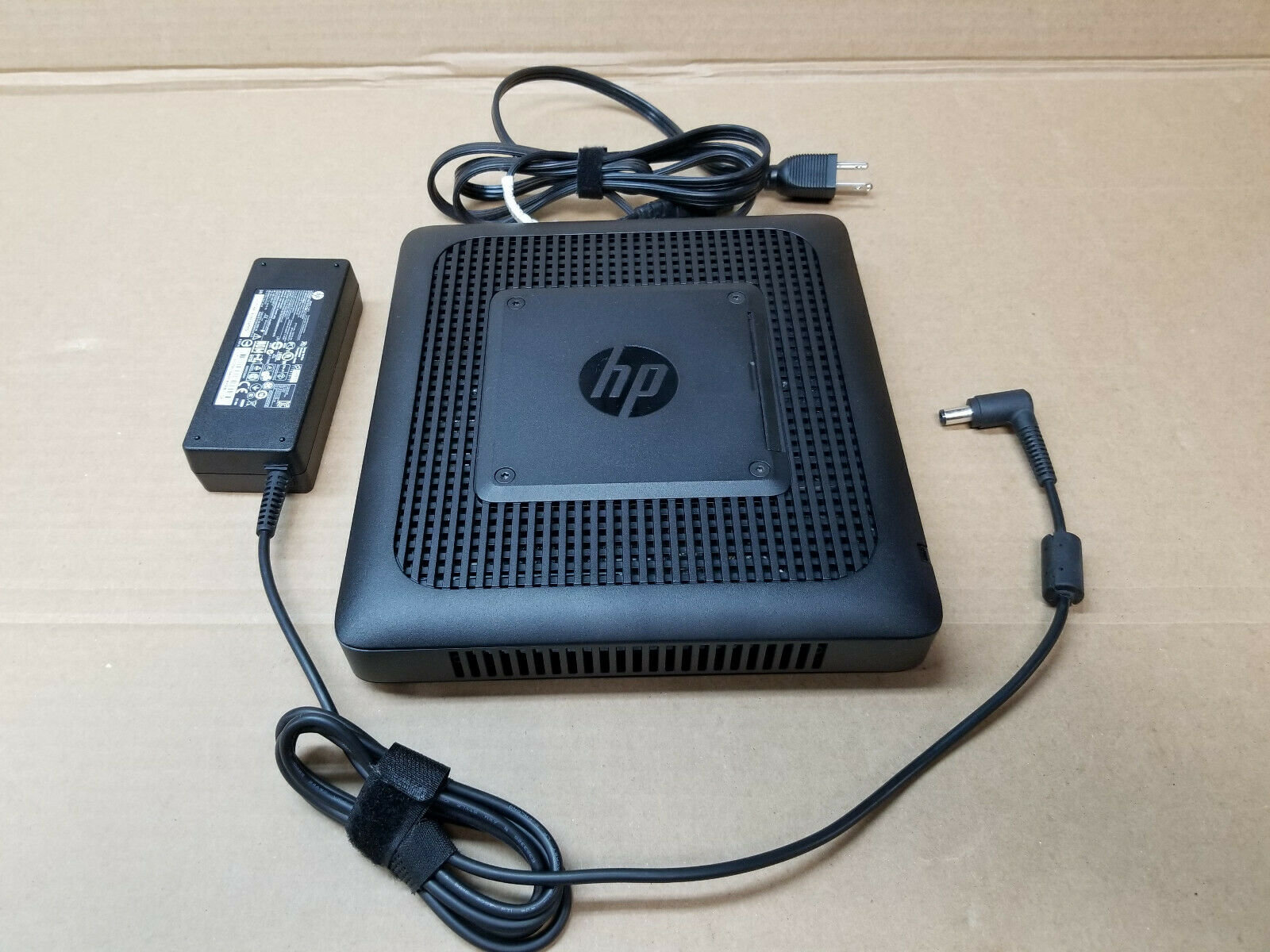
Bonjour,
il y a aussi le petit HP T620 destiné aux pro, que l'on trouve un peu partout pour un cout inférieur a 200Euros voire moins, alimentation entre 12 et 19 Vcc. S'il faut changer le DD, mettre un SSD M.2 (il a aussi l'avantage d’être équipe d'un RS232 et 6 USB). Voir si besoin toutes les caractéristiques sur le site https://support.hp.com/fr-fr/product/hp-t620-flexible-thin-client/5404706/manuals.
CDT







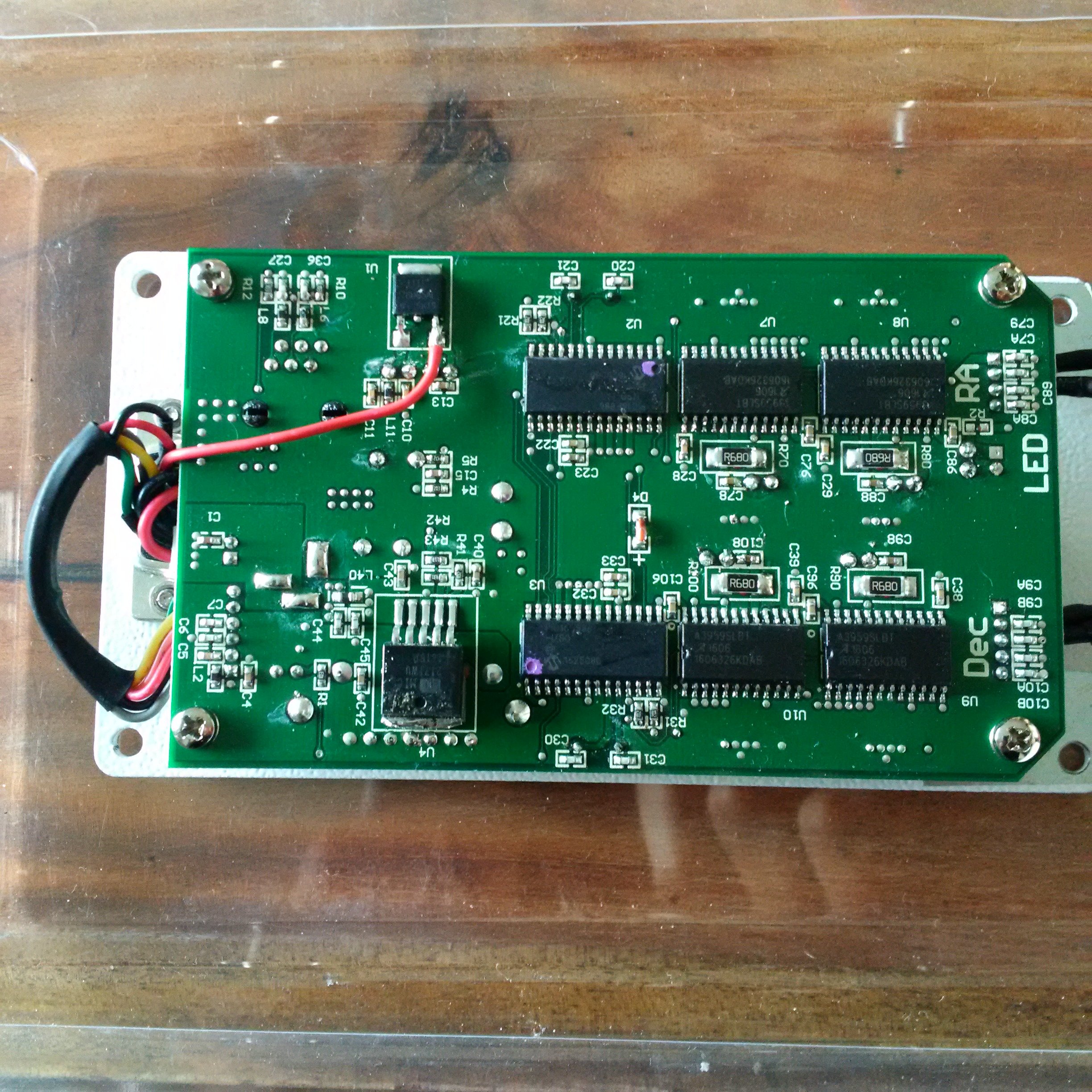



Carte contrôleur Eq6 en détail
dans Les bricoleurs
Posté
Parfaitement, tu es rapide. Ceci dit en passant, quel soft utilises tu pour tes schémas, pour ma part j'utilise Proteus Professional 8.9 SP2. La nécessité de monter un potar, me permettra de rattraper le décalage de dérive en suivi suivant le jeu de réduction poulie/couronne, en ajustant la vitesse moteurs via la fréquence. Cet ajustement aura lieu lors de mes prochains essais.