
astronomixlegaulois
-
Compteur de contenus
105 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par astronomixlegaulois
-
-
Salut, et merci pour vos commentaires!
Je crois que tu as bien saisi ce que je décris @sixela. Je vais essayer de reformuler avec mes mots et une nouvelle visu qui m'aide à avancer dans ma compréhension. Dis moi si tu penses qu'on dit la même chose avec des mots différents
")
Deux petits schémas additionnels pour soutenir mon propos. Une vue générale et un zoom pour mieux comprendre.

Le segment bleu foncé est horizontal et passe par l'axe polaire (il est dans le plan médian de la table équatoriale). Sur ce dessin 3D j'ai "usiné" le secteur nord comme si une ponceuse avait été posée horizontalement, "le long de" ce segment bleu foncé. Dans ce cas mon secteur nord est une petite portion du cône dont le segment bleu foncé est une génératrice. P est le sommet de ce cône.
La droite bleue turquoise passe par le point P et le point G qui représente le contact entre le galet d'entrainement et le secteur nord.
Enfin, le segment noir est horizontal, passe par G, et est dirigé en direction de l'axe polaire. Si le galet d'entrainement était positionné exactement horizontalement, il devrait être positionné le long de ce segment noir.
Ce qu'on voit ici et que je suspectais un peu plus haut, c'est qu'il y a un angle entre les segments bleu turquoise et noir. Autrement dit, si on usine le secteur nord, en positionnant une ponceuse comme décrit habituellement (le long du segment bleu foncé donc), les galets ne devraient pas être horizontaux, mais très légèrement inclinés (le long de la droite bleu-turquoise, c'est à dire en direction du sommet du cône), sinon ils ne seraient pas bien en contact avec le secteur.
Bon, pour tempérer un peu ce constat, les segments bleu turquoise et noir ne sont ici espacés que de 1.6°. Avec un secteur de 15mm d'épaisseur, cela représente ici un "défaut d'horizontalité" de 0.4mm. C'est probablement négligeable par rapport à toutes les autres erreurs probables de fabrication.
Partagez vous cette analyse? Y voyez vous une erreur d'interprétation?
PS: Comme je compte imprimer en 3D le secteur nord, je compte tout de même imprimer la forme théoriquement parfaite (celle qui serait obtenue en positionnant une ponceuse le long du segment noir), de façon à pouvoir mettre mes galets à l'horizontale sans aucun scrupule! C'est l'avantage de l'impression 3D, on fait ce qu'on veut
 .
.

-
Alors si, je t'assure que sur mon 3d le segment n'est pas tangent. L'inverse aussi est vrai: si je simule une ponceuse à l'aplomb des galets, la surface n'est plus tout à fait horizontale au milieu du VNS (dans ce cas on voit un jour entre l'horizontale et le VNS). Mais je comprends de ta réponse que les deux situations devraient donner exactement le même résultat, c'est bien ça?
J'avoue que je n'ai qu'une confiance modérée sur les fonctions de révolution du logiciel avec lequel je fais mes 3d (Fusion360). Il m'a déjà fait des choses étonnantes à ce niveau.
Mais ça serait couillon que j'imprime la forme supposée parfaite en 3d, pour me retrouver avec une erreur de modélisation!...
Il y a 10 heures, JMDSomme a dit :une surface réglée (generatrices rectilignes) gauche ( generatrices non paralélles)
Petite question sur le côté: j'ai l'impression que tu as un bagage sur les coniques. Je n'en ai pas, mais aimerais me renseigner un peu plus. Aurais tu un ouvrage ou quelques mots clés à me recommander?
-
Ahah, ça me fait plaisir de voir que je ne suis pas le seul à me poser ces questions! Merci pour vos réflexions.
Le 10/12/2022 à 10:52, yannick78 a dit :Ensuite l’imprécision est sur le contact entre le roulement vertical et le secteur, mais en fait un sans fout ce défaut sera toujours plus faible que le défaut de mise en station ou d'entrainement
Le 10/12/2022 à 04:45, JMDSomme a dit :'il reste toujours kk chose d'un poil approximatif. Ce malgré de savantes épures en 3D et longues reflexions 🤣
Mais... une fois bien reglée, bien positionnée, ça fonctionne plutot pas mal.
En fait plus que les défauts d'entrainement, c'est plutôt la stabilité de l'ensemble qui me pose question. En gros je me demande si ça risque de "blobloter" çà ou là. Les multiples réalisation ont l'air de prouver qu'en pratique ça marche.
Bon mais ceci étant dit si la forme du secteur n'est pas approximée, comme évoqué ici...
Le 01/11/2022 à 16:40, astronomixlegaulois a dit :
... j'ai du mal à voir pourquoi mettre la ponceuse au milieu ou à l'aplomb de la position des galets donne un résultat différent (qu'on soit clair, j'ai aussi du mal à me convaincre du contraire hein 😁). J'ai simulé les deux situations en 3D. Ça donne une différence (très petite mais réelle).
Sur le dessin ci dessous j'ai simulé l'effet d'une ponceuse mis au milieu, comme suggéré sur le site de Magnitude 78. Les galets nord sont sensés être placés à l'aplomb du segment bleu:
Et si on zoome (beaucoup), on se rend compte que le segment bleu "passe" à travers le secteur:
Si quelqu'un a une interprétation, je suis intéressé!
Le 10/12/2022 à 15:08, sixela a dit :De toute façon il reste toujours une minuscule erreur avec des secteurs VNS
Est ce que tu penses que c'est le cas même si la forme du secteur est celle dessiné ci dessus (sans approximation par des plans)? Si oui pourquoi?
Bon, finissons sur une note un peu plus terre à terre: est ce que l'un d'entre vous aurait utilisé un servomoteur comme décrit sur le site de Magnitude78 et pourrait me donner les références dudit servo (surtout couple et consommation)? Alternativement, je zieutais sur cette bête là : https://www.gotronic.fr/art-moteur-28sth32-0674b-33331.htm avec un couple probablement surdimensionné...:
Au plaisir de vous lire!
-
Hello,
La réflexion se poursuit... avec quelques interruptions dans le calendrier, mais elle se poursuit tout de même!
J'ai une nouvelle question qui fait référence à la méthode usuellement employée pour réaliser les VNS. Je fais référence au montage décrit sur le site de magnitude 78 et qui consiste à réaliser la forme de la conique avec un montage à base de charnière et de ponceuse à bande:
Ma question est la suivante : la forme obtenue en positionnant la ponceuse comme sur ce schémas est elle strictement identique à celle qui aurait été obtenue en positionnant la ponceuse là où seront installés les galets?
J'ai du mal à m'en convaincre intuitivement et la modélisation 3D semble montrer une différence (certes minime) entre les deux situations... Qu'en pensez vous?
Il faut bien justifier le titre de ce post hein 😉
PS: Par ailleurs, plus j'avance, plus je me dis que j'aime bien l'idée de réaliser le secteur nord avec sa vraie forme. Faire ça en bois est probablement casse gueule alors je me dis que je vais le faire en impression 3D... Si ça débouche, je vous montrerai le résultat!
-
 1
1
-
-
Merci pour le lien hpspt!
JM, d’abord merci pour tes autres posts sur le sujet et les articles de ton blog qui m’ont inspirés sur pas mal de bricolages!
Je ne parlais pas du glissement « le long du secteur », mais plutôt « perpendiculairement au secteur », du fait qu’on approxime les secteurs par des plans.
En fait dans le fond, je me demande si il n’y aurait pas moyen de fabriquer de « vrais » VNS, dans le sens sans faire d’approximation géométrique. Quelque chose comme ça quoi:
J’y vois deux avantages (en plus de la beauté de la chose) : 1) ça doit rigidifier la planche et 2) en théorie ça peut permettre d’avoir un suivi légèrement plus long. Bon évidement ça serait au détriment de la facilité de construction. Mais avec une réalisation comme ceci il n’y aurait plus de « rippage transversal ». (Non?) Et puis quitte à faire cela au nord, pourquoi par faire ça aussi au sud?
Je n’ai pas trouvé de référence à ce genre de construction sur le net. Si vous avez déjà vu cela, les liens m’intéressent. Pour la réalisation pratique, j’imagine:
- découper la forme « vue de dessus » , par exemple quatre fois, dans du contreplaqué de 15 mm.
- Empiler et coller les morceaux ainsi obtenus. Ca devrait donner ça:
- Dégrossir la forme finale à la scie sauteuse (probablement rock and roll vu qu’un ne sera pas sur une surface plane)
- Finir avec la même méthode que celle décrite sur le site de Magnitude 78 (pivot et ponceuse) pour obtenir la forme finale.
Je me doute bien que ce que je propose ici est probablement assez overkill, en particulier pour un suivi en visuel. Mais à part cela qu’en pensez vous?
A bientôt,
Daniel
-
1
-
-
Salut à tous,
Avec les oppositions de Jupiter et Mars, cela fait quelques temps que je me dis que c'est le moment d'équiper mon Strock d’une table équatoriale.
"Bah tu n'as qu'à suivre l'excellent tuto du site de Magnitude 78!" me direz-vous! Oui mais voilà, j'avais changé certaines cotes par rapport aux plans du Strock initial. Oh, pas grand-chose, quelques millimètres çà et là. Mais juste assez pour que je me dise qu'il serait quand même bon de réfléchir avant d'agir. Et puis ça me plait de comprendre ce que je fais avant de bricoler! Malgré un bon paquet d'heures à essayer de trouver des explications sur les principes des tables équatoriales, certains détails m'échappent encore. Alors je me suis dit que je ne serai peut-être pas le seul à me poser ces questions (même si je suis tout à fait conscient que certains de ces détails ne sont pas nécessaires à la fabrication d’une table équatoriale qui fonctionne) …
Voici donc une première question :
Lorsque l’on suit un principe de VNS (Vertical North Sector) avec lesdits VNS plans, il doit y avoir un glissement sur les galets. En pratique je me demande pourquoi cela ne crée pas de problème pour les entrainements avec galet motorisé ? Comme le galet doit « accrocher » le secteur pour l’entrainer, je m’attendrais à ce que ça fasse des « à-coups » lorsque le patin dérape latéralement.
Merci d’avance pour vos lumières
Daniel
-
1
-
-
Salut et merci pour ton retour! Ça alimente la réflexion mais ne répond pas vraiment aux deux questions que j'évoque. 😉
Tout de même intéressant!
-
Salut à vous,
Je rebondis sur ce topic parce que je suis exactement sur la même problématique et en train d'essayer de me faire une religion pour la motorisation de ma future table equatoriale: courant continu ou pas à pas.
Question subsidiaire quels sont vos éléments de réflexions pour le dimensionnement du moteur (couple)? J'ai l'impression que cela est souvent fait à l'intuition. C'est correct mais si certains d'entre vous ont poussé la réflexion mécanique, je suis preneur de vos retours d'expérience.
A bientôt,
Daniel
-
Ahhh, ça fait plaisir de voir la famille par ici! 😋
Daniel (le frangin en question)
-
2
-
-
Salut Oodini,
Oui c'est une idée qui n'est pas de moi. Tu peux jeter un oeil ici : http://www.astrosurf.com/magnitude78/telescopes/TelStrock/fabrication.html.
Bien sûr le lycra est agréable à l'emploi et, je trouve, assez joli. Mais c'est lourd et ça prend de la place. Techniquement ce qui me tire le plus soucis ce sont les virbations induites par le vent. C'est probablement la contrepartie d'alléger le tout. Je verrai bien. Je pense avoir plus à gagner qu'à perdre!
J'ai commandé mon miroir, mais ne le recevrai qu'en début 2020. J'ai donc encore un peu de temps pour coudre ma nouvelle jupe. J'ai acheté la toile, ai appris à me servir d'une machine à coudre, mais ne me suis pas encore lancé 😉
Daniel
-
Bonjour à tous,
Après une dizaine d'années de bons et loyaux services, le miroir de mon Strock 250 (f=1250mm) se fait vieux. Il s'oxyde et j'ai de plus en plus de mal à avoir de belles images. Par ailleurs il est lourd (4.1 kg) et en BK7. Je vais donc le changer par un miroir plus fin et plus léger (2.7 kg) de 255mm.
J'ai le choix entre f/4.5 ou f/5 et aimerais avoir votre avis sur la focale à choisir.
D'un point de vue équilibre, actuellement mon tube est équilibré lorsque j'utilise mes oculaires (Hypérions ~380g, mon chercheur point rouge~60g et la jupe en lycra~440g). Toutes choses égales par ailleurs, l'équilibre est un peu plus précaire lorsque j’utilise un oculaire Explore scientifique (~240g) : le télescope n'est pas loin de remonter vers le zénith lorsque je pointe un objet proche de l'horizon.
J'ai fait des tests d'équilibre en remplaçant mon miroir actuel par un poids de 2.7 kg:
- En gardant la jupe lycra, le tube est équilibré sans oculaire, ou avec l'Explore Scientific, mais tombe vers l'avant avec les Hypérions.
- Si je retire la jupe en lycra, le tube est équilibré avec l'ES et l'Hypérion, mais remonte vers le zénith si je retire les oculaires.
Avec le nouveau miroir je compte changer la jupe en lycra contre de la toile de cerf volant (40g/m²).
Je me tatais donc à passer en f/4.5 ou rester en f/5. A priori, f/4.5 me donnerais un peu plus de confort à l'observation et le télescope aurait tendance à remonter vers le zénith sans oculaire (et je prends peut être un risque que cela se passe aussi avec l'ES).
Qu'en pensez vous? Également, est ce que je prends des risque optiquement parlant (obstruction, cercle de pleine lumière...)
Merci d'avance pour vos avis!
Daniel
-
Merci pour vos retours!
-
Salut Pancho61,
As tu continué l'investigation concernant Astroreflect? As tu eu d'autres retours?
Comme je suis en train de me renseigner pour changer le miroir primaire de mon Strock 250, l'info m'intéresse!
Daniel
-
Den, c'est exactement celle que tu as mis en photo que j'avais copié et que je trouvais trop lourde. J'avais beaucoup vu tes réalisations (impressionnantes du reste!).
Bon, je reconnais que le réglage de la hauteur n'est pas très simple.
Par contre Elki et Syncopatte, je ne suis pas fan des chaises à roulette reconditionnées parce que c'est quand même galère à transporter et pas très léger (tous les modèles que j'ai vu ont une partie en acier autour du verin). Et par ailleurs ça ne va pas très bas, or sur mon Strock je suis plus souvent à faible hauteur qu'en haut...
Après, peut être qu'un mix entre ce genre de tabouret et le monopode de hysot que je cite un peu plus haut pourrait être à creuser.
Je veux vraiment trouver un truc facilement transportable (de l'ordre du kg et pas plus gros que le tabouret replié), sinon, je me connais, je la prendrai pas.
J'aime bien ton idée aussi Den du tabouret à 2 positions.
Mais si on essaye de continuer sur a base de ce tabouret, que feriez vous pour l'améliorer (ou minimiser ses défauts suivant le point de vue!
)? Je me dit que c'est toujours intéressant de remuer un concept, c'est comme ça que viennent les bonnes idées non? :-)
-
Salut à tous,
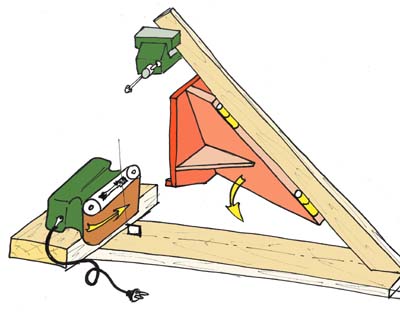
Ca fait un moment que je cherche une chaise astro réglable en hauteur pour mon Strock 250. Je ne compte plus le nombre d'heures à fouiner ici et là les idées astucieuses. Il y a quelques années, j'avais bricolé une chaise réglable un peu dans ce genre là :
Après une gamelle mémorable au premier essai (avec des amis en public!), et un petit renforcement de l'assise
 , l'engin était fonctionnel mais trop lourd. De fait il est resté à la cave et ne m'a quasiment jamais servi. Je n'aimais pas non plus son empreinte au sol (dangereux quand il y a des gens autours du télescope) et son confort assez moyen. Depuis, j'utilisais un tabouret de camping pliant et pas réglable en hauteur un peu dans ce gout là:
, l'engin était fonctionnel mais trop lourd. De fait il est resté à la cave et ne m'a quasiment jamais servi. Je n'aimais pas non plus son empreinte au sol (dangereux quand il y a des gens autours du télescope) et son confort assez moyen. Depuis, j'utilisais un tabouret de camping pliant et pas réglable en hauteur un peu dans ce gout là:

J'en ai eu récemment marre de me torturer le dos et le cervicales avec ce petit tabouret et me suis résolu de barrer cette fichue ligne de ma liste des choses à faire : "remplacer mon tabouret astro".
Les grandes lignes de mon cahier des charge sont:
- Réglable en hauteur: au moins 40 à 55cm de haut (plus bas, je peux m'assoir par terre ou me mettre à genoux, plus haut c'est inutile pour mon Strock au Zenith)
- Le plus léger/transportable possible
- Pas cher
Je pourrais rajouter nombre d'autres contraintes (faible empreinte au sol, élégant, facile à régler, assez confortable etc...), mais disons que les 3 précédentes serait déjà suffisantes pour remplacer mon tabouret actuel. En recommençant à lire les posts du forums je suis tombé sur celui là:
L'idée était bonne, mais je me disais qu'à la longue, un seul pied ne serait pas assez confortable. Alors, je me suis dit, pourquoi pas en mettre, 2, ou 3 ou 4... Ah tient, peut être que ça existe déjà! Je vous présente donc mon nouveau tabouret astro:


Il s'agit du modèle de la marque NRS Healthcare, que vous pouvez trouver à moins de 30€ sur un site célèbre de vente en ligne... Alors certes, il a un style...particulier... mais j'en suis bien content : il est léger (à peine plus d'1 kg!), il est réglable de 35 à 53cm, il se démonte avec 5 vis. Je n'avais jamais vu cette idée sur les forums astro, alors je me suis dit que ça pourrait en intéresser certains!
J'aimerai aussi avoir vos bonne idées pour l'améliorer. J'ai déjà un peu commencé:
-
Je vais remplacer les 5 vis cruci par des vis moletés (je nais que les têtes moletés pour l'instant ) :

- J'en ai profité aussi pour re-tarauder les inserts filetés qui étaient trop durs pour un vissage-dévissage régulier.
- J'envisage de m'acheter un feutre blanc (ou phosphorescent) pour repérer les 8 hauteurs et ne pas trop galérer à changer de hauteur dans le noir
- je compte me faire une petite pochette de transport (environ 40x40x3cm)
Avez vous d'autres idées? Que pensez vous de ce tabouret?
A bientôt,
Daniel
-
Je vais remplacer les 5 vis cruci par des vis moletés (je nais que les têtes moletés pour l'instant
-
Salut salut!
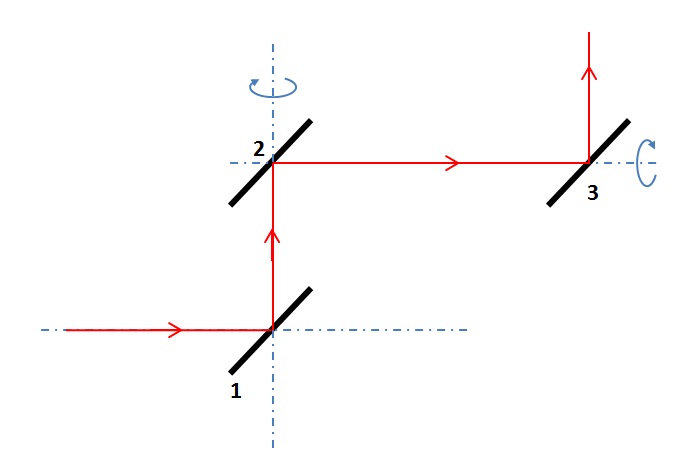
je ne suis pas sur de saisir toutes les subtilités de ton dernier message... des explications s'imposent !J'ai mis en pièce jointe un petit schéma explicatif. Le miroir 1 est fixe, le miroir 2 peut tourner sur lui même mais la gravité s'applique toujours de la même façon. Le miroir 3 peut tourner "dans tous les sens" (par rapport à la gravité).
1)Les miroirs sont assez gros (170 mm de grand axe). Comme effectivement on perd l'isostatisme avec 3 "points" de colle, autant en mettre plus.
Pour aller plus loin, pourquoi ne fait on pas la même chose sur les barillets classiques. J'imagine par exemple un primaire qui reposerai sur une plaque, par l'intermédiaire de plein de petits points de colle silicone. C'est alors cette plaque que l'on bougerai pour faire la collimation...
Questions subsidiaires :
2) Comment calculer la position optimale des points d'appuis d'un barillet sur un miroir primaire elliptique (bon, c'est une situation théorique
 )
)3) Savez vous comment sont maintenus les secondaires des gros télescopes Newton (où puis je trouver des infos à ce sujet)?
4) Est ce que les déformations calculées avec PLOP sont toujours "assez" valables si le primaire n'est plus vertical (si on ne vise pas au zenit avec un Dobson)?
5) Peut on imaginer un barillet pour gros secondaire fabriqué comme le montre l'autre pièce jointe : en bleu, la structure ; en vert, des plots de colle ; en gris, le secondaire ?
Voilou voilou, tous plein de question super tordues
 !
!Daniel
PS : Non, je ne suis pas fou
... enfin, je ne crois pas!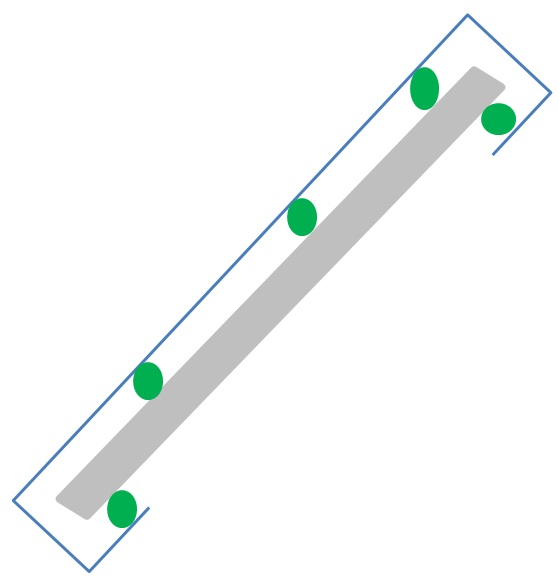
-
Il faut suivre la méthode de Serge Vieillard qui a fait ses preuves.
Tu parles du collage en silicone? En fait j'aimerai arriver à trouver quelques éléments quantitatifs sur le sujet.
hola , si je ne me trompe pas! il faut simplement en revenir au base, un verre de 1/6 d'épaisseur par rapport au diamêtre, c'est bon ,comme pour un principal tenue par trois point !que tu le soutienne par dessus( secondaire) ou dessous (primaire ) c'est pareil!aprés pour les grand diamêtre(100,155) de secondaire je met des pattes de retenue!
Les pattes de retenue, c'est pour le cas où (ou bien elles ont aussi un rôle de maintien)?
Le challenge est que ce miroir doit pouvoir bouger dans tous les sens à des vitesses relativement élevées (de l'ordre d'1 tour par minute) et respecter au moins lambda/4 (ds l'IR, à 1550 nm) dans toutes les positions.
En fait j'essaie de concevoir un système de scan ressemblant à un périscope (trois miroirs plans mobiles les uns par rapport aux autres). C'est surtout le troisième miroir qui doit pouvoir tourner dans tous les sens, les deux autres sont toujours à 45°, 1 la tête en bas, un la tête en haut.
Les miroirs sont légèrement sur-dimensionnés donc ils ne sont pas obligés d'être contraints strictement en translation dans leur plans.
Pour couronner le tout, le système peut être soumis a de fortes variations de température (une vingtaine de degrés d'amplitude).
Merci pour vos premières pistes,
Daniel
PS : je peux faire un petit schéma pour vous expliquer plus le fonctionnement du système.
-
Salut salut,
Je reviens sur le forum après une longue absence... Alors re-salut!
Je recherche une documentation technique sur les fixations des secondaires sur les Newton. Connaîtriez vous par hasard un logiciel équivalent à PLOP, mais qui pourrait prendre en compte des miroirs secondaire.
Je cherche a quantifier les déformations appliquées sur 1 miroir maintenu avec de la colle, et posé sur des points d'appuis, dans n'importe quelle position. De la même façon, j'aimerai comprendre pourquoi on utilise classiquement de la colle silicone, si c'est valable aussi pour les miroirs secondaires de gros diamètre etc...
Merci d'avance pour vos lumières!
Daniel
-
Bonsoir,
Je maintiens les vitesses proche du zénith
. Les valeurs que tu donnes sont les vitesses, mais exprimées en ''/sec. Il faut encore les diviser par environ 15 pour obtenir les vitesses en unité x .En ce qui concerne le signe -, je viens de refaire tous les calculs à la main, et il ne me semble pas m'être trompé. Pour cela j'ai utilisé la méthode de référence, mais ai reposé tous les changements de repère.
Bon, j'ai pu quand même me tromper, mais en tout cas mes calculs sont en total accord avec ceux du document de référence.
Ca serait intéressant de demander aux personnes qui t'on donné les formules, d'où elles vienne, pour pouvoir vérifier encore une fois.
Le signe n'est pas si anodin, surtout aux basses vitesses.
En tout état de cause, le juge de paix sera le ciel!

Daniel
-
Salut,
J'ai vérifié les formules. Sauf erreur de ma part, les formules sont celle ci :
Vaz = -sin(lat) + tan(hau) cos(az) cos(lat) (attention au signe moins)
Vhau = -sin(az) cos(lat)
Et en prime time, l'équation de rotation de champ :
Vrot = -cos(az)*cos(lat)/cos(hau)
Les conventions utilisées pour les angles sont celles classiques :
azimut : 0 au Nord et + vers l'Est
hauteur : 0 à l'horizon, + vers le zenith, et de -90 à +90
Toutes ces formules sont en fait dans le document http://www.obs-hp.fr/~lardiere/chapitres-controle-telescope.pdf,'>http://www.obs-hp.fr/~lardiere/chapitres-controle-telescope.pdf, mais il faut prendre une feuille, un crayon et pas se perdre dans les conventions d'angle!
Effectivement la complexité semble au premier abord divisée de beaucoup... mais ce n'est qu'en apparence. Cela revient strictement au même de convertir les coordonnées équatoriales en alt-az puis d'utiliser ces formules, ou bien d'utiliser directement les formules de vitesse en équatorial.
Enfin, même si les formules ci-dessus divergent vers le zénith, il faudrait déjà avoir pas mal de malchance pour vouloir suivre un astre qui va passer pil poile au zénit, mais aussi avant d'atteindre des vitesses prohibitives (disons plus que 300x), il faut être à moins d'un degrès du zénith... Ceci laisse donc pas mal de marge de manoeuvre.
Pour avoir un ordre d'idée, les vitesses necessaires pour s
Suivre un astre à une hauteur de 89.5° sont de l'ordre de 82x, et pour une hauteur de 89.9°, de l'ordre de 415x...
J'ai vérifié et revérifié mes calculs qui semblent correct, mais je ne suis pas à l'abris d'une erreur. Si Arnaud tu pouvais confirmer avec le fichier Excel ce serait bien.
Salut Coredump,pas de problème:
Vaz = sin(lat) + tan(hau) cos(az) cos(lat)
Vhau = -sin(az) cos(lat)
avec:
az: azimuth courant
hau: hauteur courante
lat: latitude du lieu d'observation
et l'unité est 1X soit env 15"/s.
le résultat de ces formules a été vérifié en les comparant à celles trouvées dans: http://www.obs-hp.fr/~lardiere/chapitres-controle-telescope.pdf sous Excel: le résultat est identique avec une complexité divisée par 5.
Pas de problème pour les implémenter dans PIC-ASTRO, le plus dur va être de contrôler les effets de bords: en cas de déplacement manuel ou automatique il faut prendre en compte les vitesses de suivi pour éviter de trop brusques variations de vitesses et ça va sûrement demander un traitement conséquent et difficile à controler.
Arnaud
-
Salut à tous, salut Arnaud,
Je viens de tomber sur cette discussion qui m'intéresse à plusieurs titres. Comme j'en ai déjà parlé ici il y a quelques temps, je suis en école d'ingénieur et mon projet principal (en binôme) pour cette année est de motoriser mon Strock-250 en respectant au mieux son aspect de portabilité. Après étude, seule une monture alt-azimutale pouvait y parvenir (ou peut être une monture trois axes, mais on n'est pas allé aussi loin).
On a un gros impératif de délais (juin). Par conséquent, la partie mécanique est presque terminée et la partie électronique (Pic astro vous l'aurez compris!)également!
Je passe donc maintenant au soft. Je ne connais que le JAVA (pas le C), mais ça serait bête de ne pas s'inspirer du boulot de Mel Bartel. Bon il y a quand même une grosse spécificité par rapport à ce dernier : le but ultime est de concevoir un soft capable de suivre l'ISS automatiquement, et ce de façon asservie (pas uniquement grâce aux TLE de la station, mais en faisant aussi une analyse d'image en temps réel). Par ailleurs je ne sais pas si le soft de Mel Bartel a une fonction autoguidage, mais le notre en aurra une! Je ne sais pas si un soft du genre a déjà été envisagé, en tout cas je n'en ai pas trouvé sur google...
Bon, les questions maintenant! :
1) CoreDump :
Merci pour les equations, j'aimerais bien motoriser un dob, mais sans avoir les inconvénients du systeme bartels.Quels sont-ils?
2) Pourquoi les fonctions LX-200 ne sont pas compatibles avec les logiciels standards de suivit et go-to alt-az?
J'ai pas tout compris dans :
Cette version devrait aussi être compatible avec certains logiciels de cartographie tournant sur PC autorisant les goto; il y a restriction sur ces logiciels, hors ceux qui utilise,t le driver ASCOM LX200 GPS car il faut que ces soft ou drivers fournissent les infos locales: date, heure, latitude du lieu d'observation. Ce dernier paramètre étant indispensable en autonome il sera ajouté dans le fichier de configuration.2) Super les formules Valt et Vaz en fonction uniquement des coordonnées alt-azimutales de l'objet. Ca permet en effet d'être indépendant du PC sans trop de calculs. Cependant dans la convertion des coordonnées équatoriales en alt-azimutales, tu es obligé de faire un calcul assez bourrin (Temps sidéral etc...). Tu comptes rentrer cela aussi dans le PIC? A ce moment le PC ne sert plus qu'à envoyer des coordonnées alpha et delta pour le go-to (et ne calcul plus rien) c'est ça?
Si oui, quand penses tu avoir rentré cela dans le PIC? (la vrai question est : est ce qu'on doit coder l'intéligence de suivi et go-to dans le soft, ou bien juste se concentrer sur l'ISS en te faisant confiance pour le codage des deux autres trucs d'ici fin Mai ou avant?)
Merci d'avance
Daniel PALETTI













Métaphysique des tables équatoriales
dans Les bricoleurs
Posté
Salut à tous,
Des fois, la métaphysique finit par devenir de la physique... J'ai le très grand plaisir de vous présenter ma toute nouvelle plateforme équatoriale!
Quelques rapides commentaires, en attendant de trouver le temps de décrire tout cela un peu plus précisément.
Les principes que j'ai suivi, sont très largement inspirés des plateformes équatoriales présentées sur le site de Magnitude 78 et les autres sites biens connus de Google si vous tapez "planche/planchette/plateforme équatoriale". La seule originalité que je n'ai trouvée nulle part dans mes recherches, a été de faire imprimer en 3D les secteurs nords à la forme théorique parfaite. Les secteurs ne sont donc PAS approximés par des segments comme cela se retrouve usuellement.
Les impressions sont en Nylon PA12. Je les ai faites faire chez PolyD (boite Italienne très sérieuse et compétitive) et Sculpteo (en région parisienne). Je vous recommande les deux enseignes!
Le moteur est un petit moteur pas à pas dont je vous joins la fiche technique. Il est tout riquiqui (2cm de côté), pèse vraiment pas lourd et a un couple plus que suffisant (même en ne l'utilisant pas à son couple maximum).
J'ai cherché à avoir la plateforme la plus compacte possible. Il y aurait probablement possibilité d'aller encore gratter 2-3cm en hauteur, mais au prix de compromis et d'efforts qui ne me paraissaient pas en valoir la peine. La plateforme est plus petite que la boite de mon Strock 250 (c'était un critère de design) et probablement moins haute que le couvercle (/socle) classique de celui ci.
L'entrainement est fait par friction. J'ai rajouté un fin morceau de chambre à aire (caoutchouc) pour n'avoir aucun problème de glissement.
J'ai également cherché à faire le plus léger possible. La plateforme est réalisée en contreplaqué de 12mm d'épais, évidée par endroit à la défonceuse.
La plateforme complète pèse au final à peine plus d'1 kg!
Qui dit moteur pas à pas, dit contrôleur. Qui dit contrôleur dit "ben pourquoi pas rajouter quelques capteurs pour se faciliter la vie"!
J'ai donc mis un inclinomètre (pour faciliter la mise en station) et une sonde PTH parce que... pourquoi pas, et bien sûr une recharge usb-c!
L'ensemble étant alimenté par 2 batteries 18650, ce qui me donne une généreuse autonomie de plus d'une dizaine d'heures.
Le micro-controleur est un XIAO RP2040 (géniale cette petite carte).
Je l'ai testée sur le ciel hier soir pour la première fois, ce projet de plateforme équatoriale étant en gestation depuis... pas loin de 3 ans. Que dire d'autres que "wow"... Le suivi change tout dans l'expérience à fort grossissement. Je peux enfin prendre le temps d'expliquer aux gens ce qu'ils sont en train de voir sans recentrer l'objet toutes les 30s. Je peux enfin scruter les détails des objets à volonté. Les mouvements sont parfaits. Je n'ai presque aucun jeu.
C'est juste magique!
J'ai certainement quelques détails que je vais encore peaufiner, et beaucoup d'éléments qui auraient pu être fait de façon plus simple ou approximative. Mais toutes les heures que j'ai passé à lire, essayer maladroitement de comprendre, dessiner, tester, à faire et refaire sont très largement compensées par la fierté du résultat, le plaisir d'avoir appris énormément de choses, et la sensation d'apporter ma petite pierre à l'édifice des concepteurs d'instruments.
J'espère que cette réalisation en inspirera d'autres. Évidemment si vous avez des questions sur la réalisation, je me ferai un plaisir d'y répondre!
Bons cieux,
Daniel
8HS11-0204S-PG90_Full_Datasheet-1.pdf