
seriousmath
-
Compteur de contenus
1 734 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par seriousmath
-
-
effectivement tu as tout a fait raison !
C'est l'avantage de la bibliothèque ACCELSTEPPER, il y a un paramètre d’accélération que j'ai complètement omis de prendre en compte si tu fais le tour complet...
Je peux même réduire je suis sur mais comme disais j'ai des risques de décrochage.
-
Merci
je reçois d'autres arduino dans les jours qui viennent, je testerai ça directement avec des aimants de disques dur
limite trop puissant et il sont énormes ! De plus une galère pour les sortir du boitier.
Si jamais j'ai plein d'aimant de moteur en rab...
-
Concernant les capteurs analogiques as tu regardé ?
Avec les entrées Analog de l'arduino on peut récupérer une valeur sur 1024 pas donc une bonne précision.
Non j'ai placé mon capteur digitale avec déplacement de la roue d'un nombre defini de pas, la precision est excellente ainsi. Et comme a l'initialisation j'ai toujours cet ordre de filtre RVBXY je suis sur d'etre toujours bien en place.
Sur les vidéos, je vois que la roue tourne assez lentement.Avez-vous réussi à passer le test de conformité ASCOM ?
La roue mets 5sec entre chaque filtre donc 25 sec maxi pour faire le tour. Si je vais plus vite le moteur décroche.
Pour ascom je n'ai aucun souci une fois les parametres réglés.
Regardes ici elle est mieux
Moi je ne trouve pas que c'est lent, mais je n'ai pas d'autres références ! Par contre je constate une "anomalie", si on peut appeler ça comme ça, c'est du passage du "sans filtre" au retour "home" où le moteur repart en sens inverse alors que c'est le step suivant ... Mais peut être trop compliqué et source d'erreur pour le programme ???tout vient de mon code.
Je n'ai pas de capteur pour chaque filtre donc dans le code en gros tu as 5 positions qui sont en fait le 0 incrémenté d'une valeur entre chaque filtre donc si tu est sur un filtre le système repart en arrière et ne prend pas le chemin le plus court.
De mon côté, j'ai géré l'optimisation du déplacement.Je vous donne mon bout de code, qui a l'air de ne pas trop mal fonctionner pour l'instant.
C'est mon code modifié ou le tiens que tu as crée ? ca m’intéresse grandement. Par contre tu es sur d'utiliser la bibliotheque ACCELSTEPPER ??? jamais vu de fonction type FORWARD dans cette bliblio
Bon sinon j'ai noté un petit bug dans le système a chaque connexion d'un port usb, la roue s'initialise.
Il faut donc pour ca schématiquement câbler 2 nouveaux composants.
pin RESET arduino --> interupteur 2 positions ON/OFF --> condo 470µF 25V (borne -) --> condo borne + --> +5V arduino
Ce petit câblage empêche la réinitialisation intempestive.
++
-
salut !
j'en ai parlé dans mon tuto de la RAF motorisée dispo sur le forum.
Si tu veux un placement au poil garce au capteur il te faut prendre des capteurs hall analogique.
Tu va pouvoir détecter une variation de courant et pas un état.
Donc tu modifies ton programme pour que la roue s’arrête en fonction de la valeur lue par la pin.
Si tu utilise un capteur digitale tu n'a pas le choix de faire en fonction du delta donc comme tu disais ca détecte l'aimant avant que la roue soit en place.
C'est la méthode que j'ai utilisé, détection de l'aimant puis incrémentation du moteur d'un certain nombre de pas.
Dernière chose que j'avais précisé, dans les moteurs brushless de drone par exemple tu as des aimants extra puissant mais extra plats.
++
-
Salut !
J'utilise une 120MC avec Firecapture, paramètre en mode Lune et gain à 85%.perso j'ai la 120MM-S, la version noir et blanc.
85% de gain sur la lune je trouve ça énorme ! Meme avec le C8 à 4000 de focale je dois etre à 40% de gains maxi.
Si je pousse trop le gain, j'ai presque le meme effet que sur ta photo.
Pour tes poussières, il y a un bouton dans firecapture pour prendre automatiquement un flat avent de faire ta video.
-
salut
DRV8825_HW203_F, ça c'est le nom du firmawe (sketch) à transférer dans l'arduino, c'est la version full avec T°, bouttons poussoir, LCD....
Je n'ai pas suivi ce projet de focuser mais celui qui a servi à le créer, tu n'as pas besoin de typon ou autre à la base pour réaliser le système, il te faut juste un DRV8825 + moteur pas à pas + arduino
++
-
Merci

Pour des aimants pas chers, j'en ai trouvé dans les moteurs brushless HS de mon drone.
Il font 14mm x 4mm X 1,5mm, coupé dans la longueur c'est parfait.
Niveau puissance, je détecte avec le capteur analogique AH3503, une variation entre 2,3V et 5,1V, à un peu moins de 1cm du capteur. Ce qui est très précis.
J'ai pas ouvert ma RaF pour intégrer ce capteur et ces aimants mais si un jour j'ai le courage je les rajouterais dans le système car avec 5 aimants je serais au top niveau précision.
Dans l’immédiat le système est parfait à mon gout, quand le courage me viendra, je modifierais tout ça.
J'ai fais une vidéo où l'on voit le déplacement entre certains filtres et la fonction home.
Il est sur qu'un comparateur mesurant le positionnement serait plus parlant sur la vidéo mais franchement c'est déjà super précis avec le moteur pas à pas.
Bien plus qu'avec le pion de centrage d'origine et ses 2 mm transversaux de battement

"https://www.youtube.com/watch?v=V4JJE5ZBi-8" via YouTube ERROR: Si vous lisez ce texte, YouTube est hors-ligne ou vous n'avez pas installe Flash je suis toujours à dispo si besoin est
++
[EDIT] La balise YOUTUBE déconne plein tube sur le forum si jamais lol
-
Super pratique pour ceux qui restent à la maison
Dans n'importe quel cas c'est super pratique !
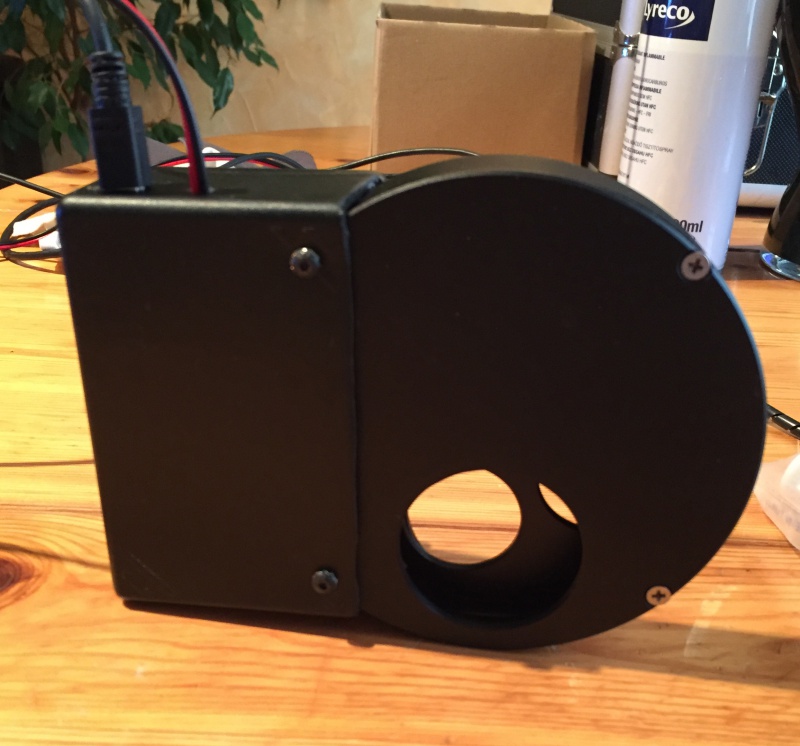
300€ une RaF motorisée dans le commerce astro
100€ de roue +10€ de composant pour mon système (qui de plus, est hermétique au même titre qu'une RaF du commerce)....
l faut le prendre de quelle taille pour qu'il rentre dans la roue zwole miens est un cylindrique 5mmx4mm
http://www.gotronic.fr/art-aimant-o5-x-4-mm-4089.htm
Plus gros ça passerait à l'aise ! Surtout que le capteur hall fait 2x3mm grand max, c'est tout petit...
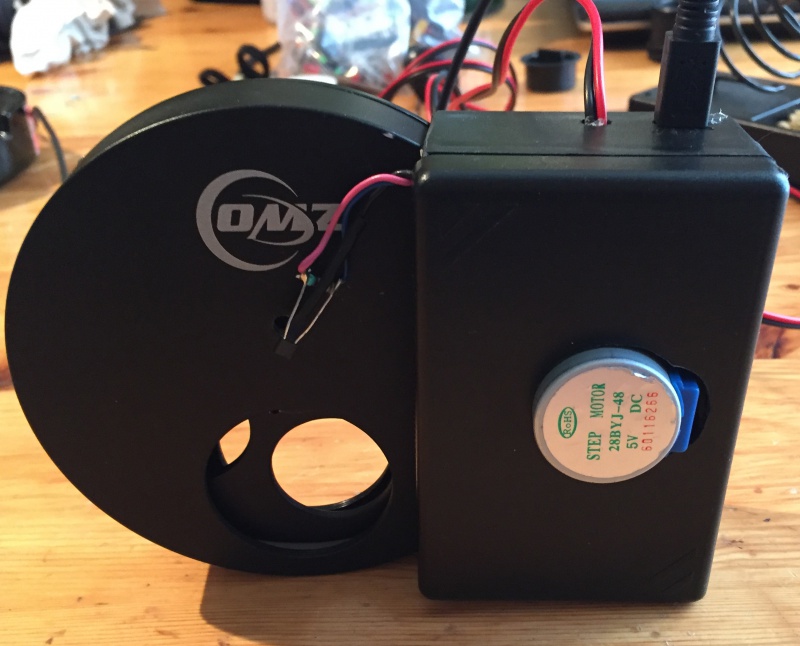
Tu l'as collé directement sur la roueOui il est collé avec un point de glue 3 sur la roue en direct. La roue est fermé mais je te fais un croquis pour te montrer sa position avec le capteur hall.
2/ Capteur hall analogique
J'en ai un aussi mais pas dans la roue (la flemme de modifier mon programme).
Celui ci va détecter la variation de courant dans le capteur.
C'est encore mieux car arrivé proche du capteur tu as une valeur qui va former une sinusoïde donc tu peux dire au programme arduino d’arrêter la roue quand elle arrive à une certaine valeur. Pas besoin de phase d'approche supplémentaire.
Dans les 2 cas comme je disais c'est super précis, ca va être la conception mécanique de la roue le plus déterminant.
Si les chinois ne percent pas les trous des filtres à valeur d'angle égale la roue ne sera pas positionnée exactement au bon endroit entre le 1er et dernier filtre.
J'ai de la chance leur commande numérique fonctionnait bien, sinon il faut mettre un capteur hall analogique par filtre et là, tu place chaque filtre comme tu le souhaite.
Je peux te faire une vidéo de ma séquence home et le déplacement des filtres pour que tu te rende compte de la précision.
++
Math
-
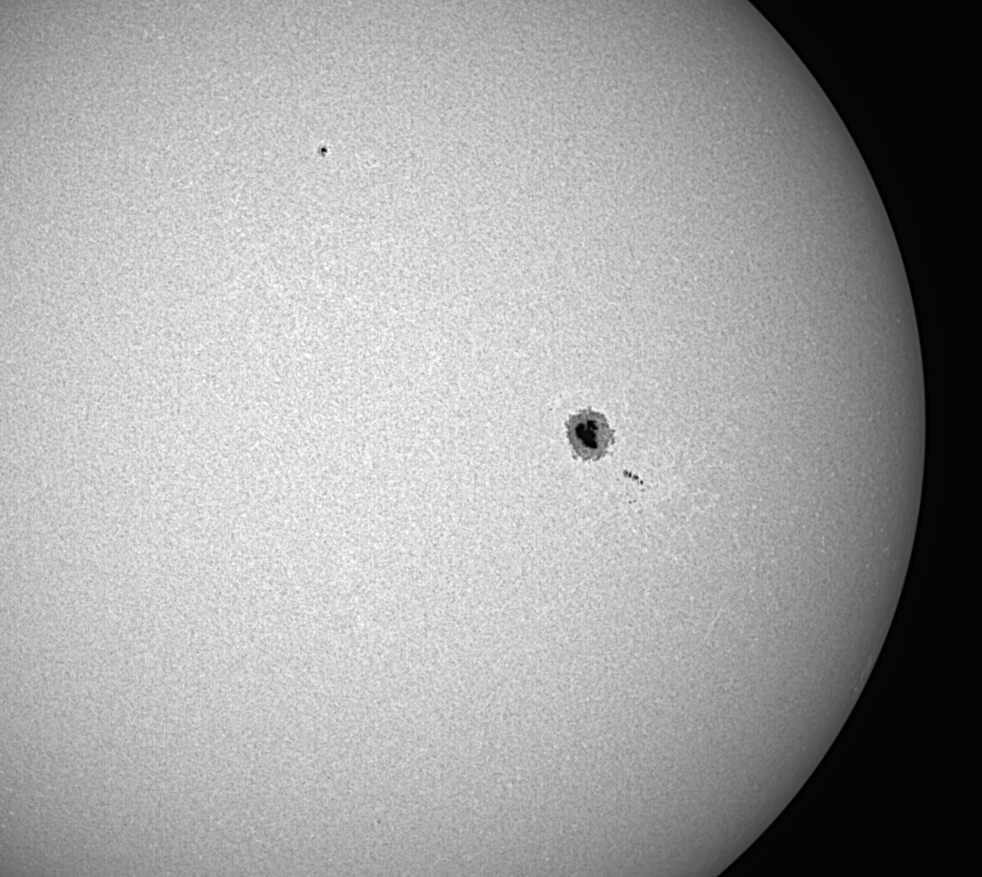
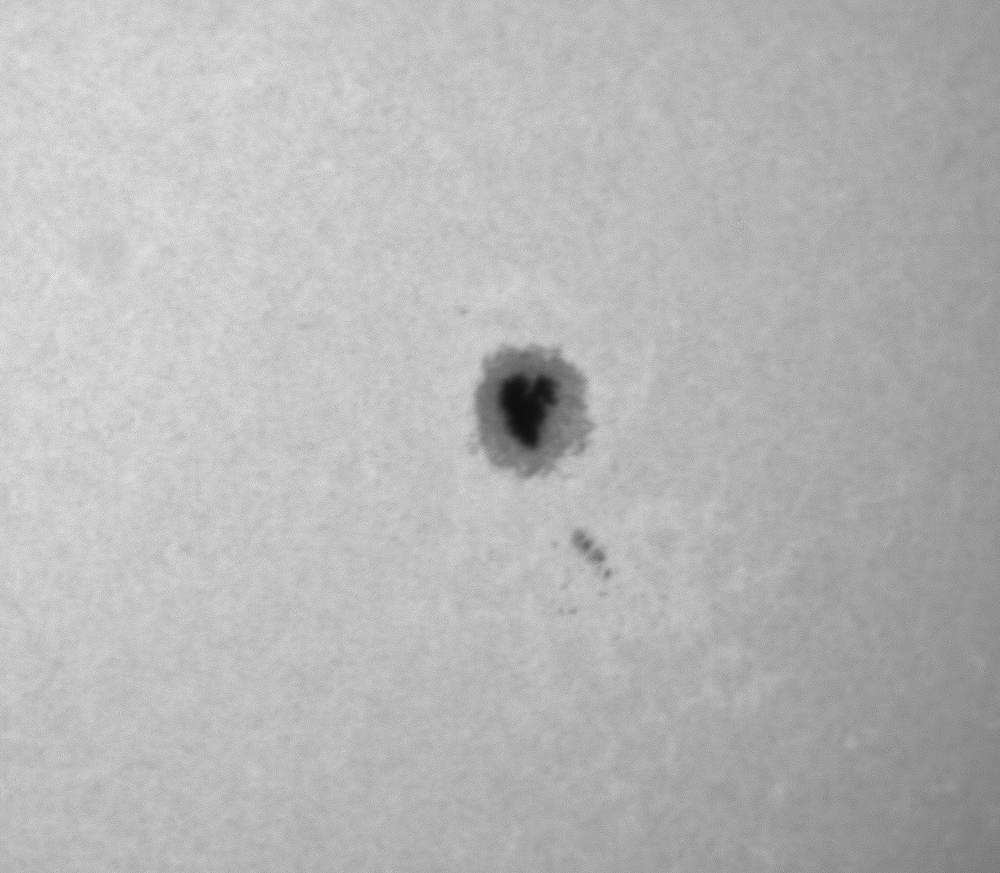
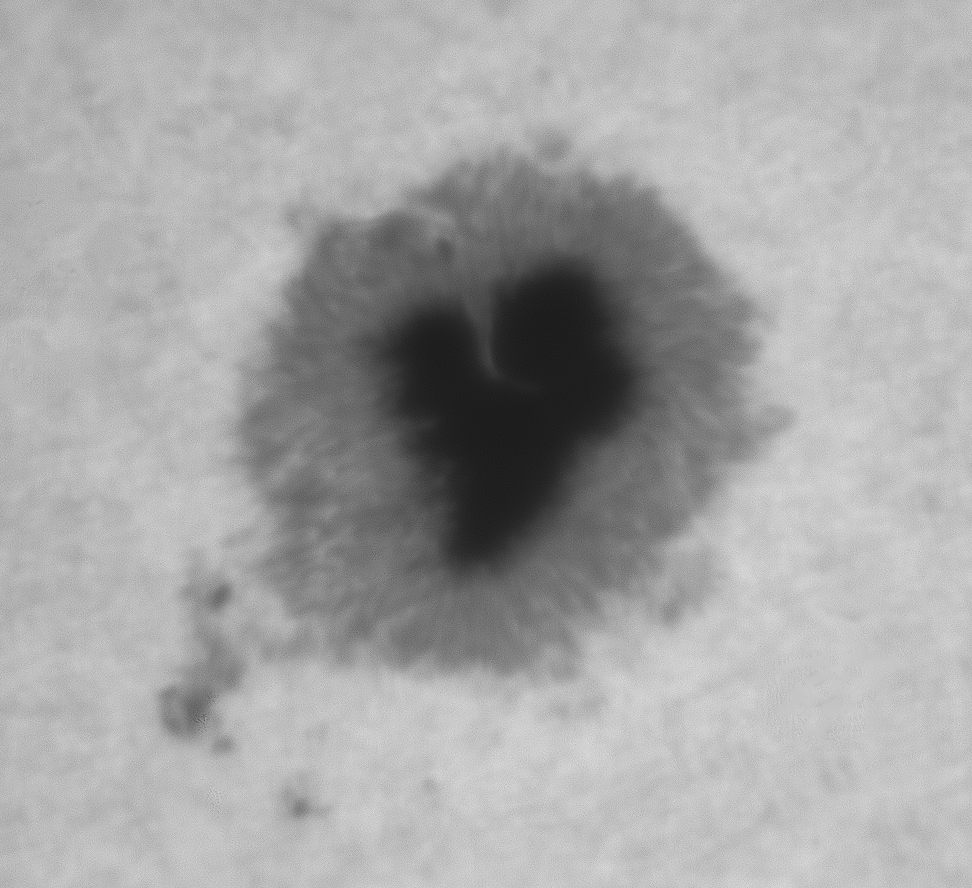
Salut à tous !
Je vous présente à mon tour la jolie tache en forme de cœur sur notre astre solaire !
1 version ED80 + helioscope + K-line Baader + ASI120MM-S
1 version C8 + Astrosolar + K-line + ASI120MM-S
++
-
salut
pour mon C8 et 80ED j'ai fabriqué x2 focuser arduino avec moteur PaP
J'ai un nema 17 en 400 pas 0,9° 3,6kgs de couple et un nema 14 400 pas 0,9° 1,6kgs de couple.
Pour le driver j'utilise l'easydriver ou le DRV8825 qui supporte de plus grosse tension. (750mA pour l'easydriver et 1,5A pour le 8825)
C'est ton driver moteur qui influera sur ton microstepping:
avec un nema 17 et l'easydriver tu pourras aller jusqu'à 1/8
avec le DRV8825 tu pourras descendre à 1/32
Attention tout de même un réglage électrique par potentiomètre est a effectue sur le driver moteur pour que le PaP fonctionne correctement en microstepping.
++
Math
-
Salut la communauté !
Je vous propose un tuto que j'ai réalisé pour motoriser une RaF manuelle type Orion, ZWO...
http://www.sendbox.fr/53e17fd8bba50a72/RaF_manuelle_Arduino.zip
http://motorisation-raf-arduino.libreh.net
Dans le dossier vous trouverez tout:
- le tuto d'une 20ene de page
- Driver ascom
- Programme arduino + bibliotheque
- Shema de cablage.
Je reste à votre disposition pour tout eventuel renseignement.

++
-
Encore merci pour vos commentaires!
Hey Issam ça roule pour toi ?
Prochain achat une televue x3 ou x5...
-
Petite c'est relatif !
Je kiff !
-
Merci énormément pour vos commentaire effectivement la deuxieme me pique les yeux !!!
Hallucinant comme en moins d'1 heure la turbulence a évoluée !
D'habitude c'est 100Go pour une image médiocre, là 25Go de shoot et c'est plié.
Le pire c'est que la ed80 n'était pas en T°, 15min après le montage sur l'eq6 elle prenait ces clichés.
Mes 2 focuser arduino sont terminés, la prochaine ce sera encore plus facile de faire pareil lol
Avec le c8 derrière j'aurais encore plus jubilé !
-
Salut à tous,
Ce matin gros regrets de ne pas avoir le C8 installé au lieu de la ED80 car la turbulence de 9h à 10h était négligeable, j'ai jamais vu la granulation aussi bien résolue.
J'ai donc réussi à imager notre astre solaire avec une qualité que je n'ai jamais égalé jusque là.
Orion ED80CF T + ATLAS EQ6 + ASI120MM refroidie + Helioscope Lunt + K-line baader + barlow shorty + x2
Pour ne rien altéré, pas de colorisation ce coup ci.



j’espère qu'elles vous plaisent bien que ce ne soit pas du Ha
++
-
salut gandalf
je suis intéressé par ton code car j'ai construit la semaine dernière mon focuser et effectivement je trouve qu'il pourrait être sympa d'y apporter certaines modifications dont tu as parlé.
Je confirme que les schémas sont pas super clairs, j'ai cramé un Easydriver et un Nano en voulant rajouter les fameux boutons poussoirs. Au final je ne les ai pas mis tout comme le LCD ni la T°.
Focuser de base si on peut dire.
C'est pourquoi je ne réponds pas aux exigences de beta testeurs mais serais très intéressé d’améliorer mon petit système.
Merci
-
merci beaucoup pour vos commentaires.
Effectivement Mars et Saturne étaient très basse mais bizarrement la turbu était pas extrême.
Et comme je me suis installé vite fait sur le balcon à 3h pour shooter, j'ai pas pris le temps de monter le crayford sur le C8 donc MAP un peu hasardeuse.
-
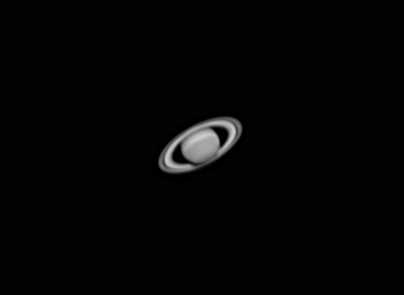
J'avais jamais testé d'imager Mars et bien c'est pas facile j'ai trouvé, et pour Saturne ma dernière acquisition datait de 2009.....
-
merci pour vos commentaires
UV/IR + filtre rouge = balle dans le pied lol, je ferais sans UV/IR prochaine fois.
Vachement dur d'imager Mars j'ai trouvé, toute rikiki.
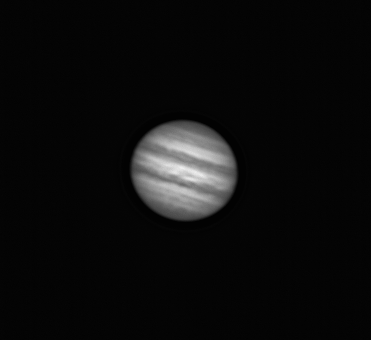
Sur la photo de Jupiter on voit que le satellite part en vrille, mauvaise barlow, collimation, MAP, le tout mélangé.....
-
Salut !
CE matin avec le C8 j'ai essayé de faire du planétaire.
Prochaine étape : Collimation
C8 + barlow X2 + ASI120MM + filtre IR/UV + filtre rouge


++
-
merci Chris pour les précisions, peut etre que cet été le ciel sera dégagé pour faire des essais parce que la c'est pas gagné
-
ok pas de probleme je testerais tout ça si un jour le temps le permets, apres nuages c'est neige aujourd'hui
-
sinon tu Jailbreak l'iphone 3G (4min montre en mains), va dans Cydia et regardes s'il y a pas un tweak pour feinter le système et passer virtuellement en 7.
Le problème sera tjr le logiciel qui lui est développer sous ios 7 donc forte chance qu'il ne tourne pas sous un "os émulé"
-
c'est les 1/10 de tour dont je flip lol
Je pense que j'utiliserais la SSAG ou la ZWO pour m'aider ce serra plus pratique qu'à l’oculaire et de ttes facons des oculaires j'ai qu'un 10 vue que je fais pas de visuel...















Roue à filtre manuelle motorisée + arduino
dans Les bricoleurs
Posté · Modifié par seriousmath
pour le driver ASCOM je ne sais pas si je pourrais le modifier.
Comme je disais les codes VB et Arduino ne sont pas de moi.
Je vais essayer de te modifier ca, pour le code Arduino je pense que c'est facilement faisaible.
Il suffit de rajouter dans la fonction LOOP des lignes pour les filtres manquants
et dans la fonction Movefilter à la fin du programme les CASE corresponds
case X: // DEPLACEMENT FILTER XX analogWrite(LEDverte,0); analogWrite(LEDrouge,1023); stepper1.setAcceleration(Acceleration); stepper1.setMaxSpeed(Vitesse); stepper1.run(); stepper1.runToNewPosition(CurrentFilter * DistanceFiltre); stepper1.disableOutputs(); analogWrite(LEDrouge,0); delay(750); analogWrite(LEDverte,1023); stepper1.disableOutputs(); Serial.print(CurrentFilter); Serial.println("#"); break;C'est ainsi que j'ai procédé pour rajouter la fonction HOME sur le programme d'origine.
Pour le code ascom je vais essayer de regarder mais pas sur qu'il faille le modifier.
voila un tuto de 30min pour modifier le code ASCOM ;-)