ms55
-
Compteur de contenus
310 -
Inscription
-
Dernière visite
-
Jours gagnés
7
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par ms55
-
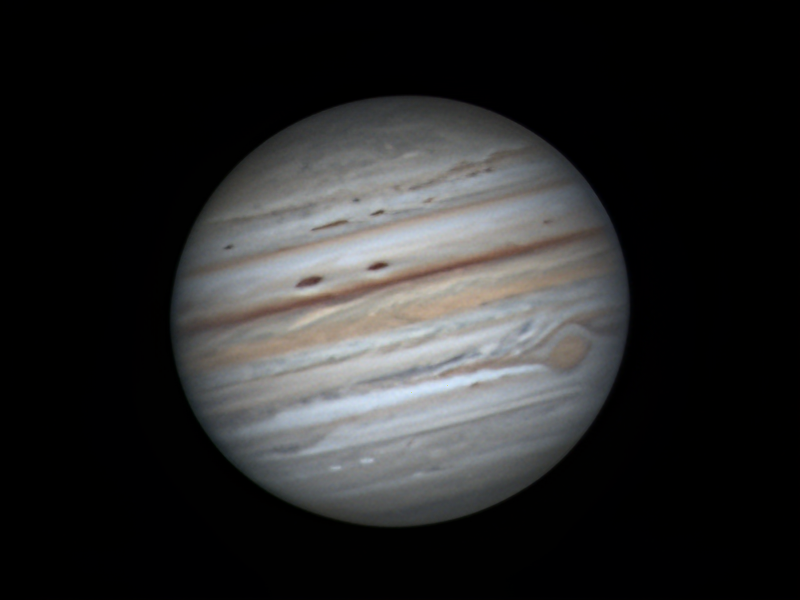
Entre 2 passages nuageux de 1h30 à 3h10 TL. C11@f/20 + ASI 462MC + EQ6-R Pro. Images 65 à 70 :