

jpv84
-
Compteur de contenus
71 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par jpv84
-
-
bonsoir
cela ne fonctionne toujours pas chez moi
j'ai bien téléchargé la version V1.15.8
je l'ai dézippé et lancé l'exe , mais pas de lancement.J'ai bien eu les messages d'alertes habituel de l'anti virus
j'ai bien renseigné le mot de passe et puis plus rien !!!
rien ne tourne en tache de fond
il doit me manquer quelque chose
PC windows 11A+
-
bonjour
je viens de changer de pc et j'ai reinstaller sirilic
mais lors du lancement rien ne se passe
j'ai installer python au cas ou
mais rien non plus
j'ai bien un message de sécurité me demandant de valider l'execution et la saisie du mot de passe
mais pas de lancement du programme
merci pour votre aide
-
KSTARS 3.6.6
dans Software
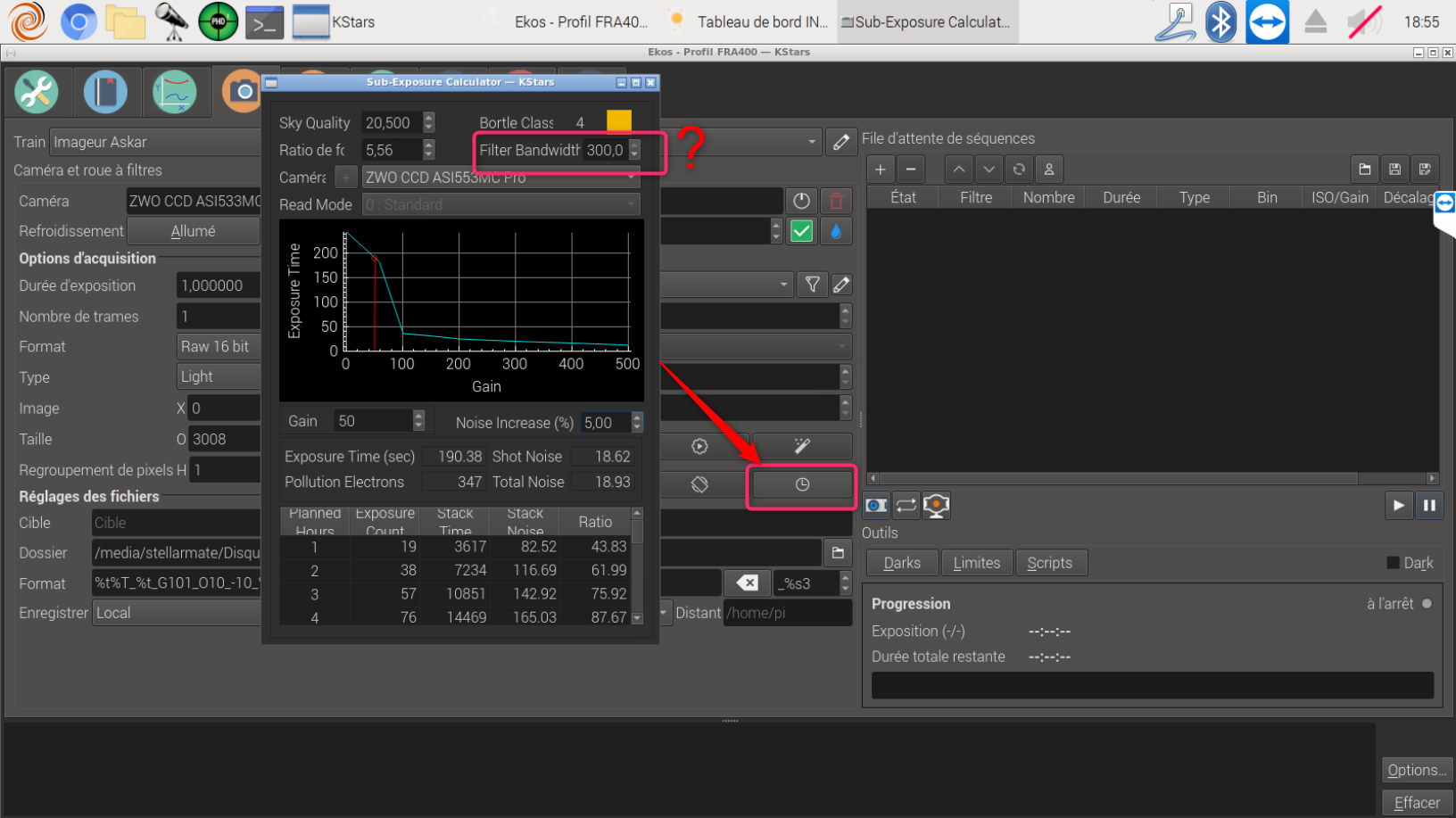
bonjour, sur la doc de la dernière version, je ne vois rien concernant le nouvel outil de calcul des temps de pose
aurais tu des détails concernant son fonctionnement
pas très clair pour moi, surtout avec l'utilisation de filtre duaband

-
Il y a 19 heures, Colmic a dit :
A fuir impérativement. Fuites de lumière garanties.
Les darks et bias ça se fait une fois par an, alors autant les faire bien
")
On prend une nuit pluvieuse, on met la caméra avec un gros bouchon EN METAL (ou carrément sur l'instrument avec son bouchon métal), on met le tout dans une pièce bien noire, de nuit et on lance les séries de poses.
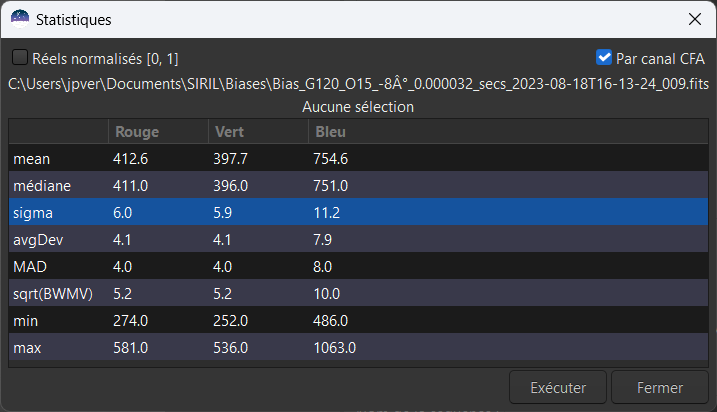
je viens de refaire des bias dans le frigo fermé ( donc tout noir)
mais j'ai le même résultat le B est sensiblement le double du V ou R
a -5° G100 O10 Sigma:
R 6V 5.9
B 11.2
à -5° G120 O15
7.3 / 7.1 / 13.6à -10 même tendance
je vais voir avec Pierro Astro chez qui je l'ai achetéNB: je viens de refaire des tests avec une autre caméra ASI 224MC et j'ai la même tendance
Le B est environ 2 fois supérieur au R et V
test réalisé en changeant de logiciel de prise de vue au cas ou.rien n'y fait
est ce que cela pourrait venir de SIRIL et son paramétrage ? -
merci pour ces infos
je vais refaire les tests dans un environnement noir total
penses tu que l'utilisation d'un filtre noir dans la roue à filtre soit suffisant
j'ai vu que certains utilisent ce genre de filtre pour les darks en automatique -
Il y a 11 heures, Colmic a dit :
Quel caméra/APN ?
Parce que là ta couche bleue est absolument anormale, toutes les valeurs sont le double du R et V.
Pour la question, généralement on prend la couche verte.
ASI533MC pro
-
Le 10/04/2021 à 16:49, Colmic a dit :
Déterminer son temps de pose ou Règle des 3 Sigma
Attention je donne ici une version très simplifiée pour ne pas être obligé de sortir des formules compliquées
L'idée ici est de déterminer le temps de pose unitaire idéal qui permettra de sortir les plus faibles signaux du fond de ciel de son lieu d'observation.
Ces mesures et ces calculs ne sont pas à refaire avant chaque sortie, mais cela permet d'avoir une bonne indication en fonction de son ciel habituel et de son matériel.
Cela évite de gâcher inutilement plusieurs soirées avec des temps de pose qui ne seraient pas adaptés.
Il est donc intéressant de perdre quelques heures à réaliser cette manip une bonne fois pour toutes, que ce soit en poste fixe ou même en nomade si l'on revient souvent sur le même site.
Ceci est également utile lorsqu'on a déjà décidé de partir sur un temps d'exposition total, par exemple 2h. Une fois qu'on a pris cette décision, il reste à savoir en combien de poses unitaires on va le découper (8x15min, 12x10min, 24x5min, 60x2min ?).
Plus le temps de pose unitaire sera faible, plus le rapport signal sur bruit (RSB) de l'image empilée va diminuer à cause du bruit de lecture. Si on respecte la règle des 3 sigmas ci-dessous, on sait qu'on va contenir ce phénomène de façon acceptable.
Enfin cette manip permet aussi d'éviter de récupérer de la trame sur sa brute d'empilement à cause d'un temps de pose unitaire qui ne serait pas suffisant.
Ici je cite @Roch, merci à lui :
Temps de pose unitaire minimum
Sur une image nous avons du signal et du bruit. Du bruit de fond de ciel (ou bruit photonique), du bruit thermique et du bruit de lecture, principalement.
- Le signal évolue comme la somme des signaux.
- Le bruit évolue comme la somme quadratique des différents bruits (racine carré de la somme des bruits au carré).
Par conséquent plus on pose, plus le signal monte, mais le bruit quant à lui monte moins vite.
On augmente ainsi le rapport signal / bruit (RSB) avec un temps de pose unitaire plus long, ou avec un nombre de poses plus élevé, sachant que plus le temps de pose total est élevé plus le RSB le sera également.
Mais il faut quand même que les signaux les plus faibles ne soient pas noyés dans le bruit sur une pose unitaire sinon ils n'apparaîtront pas quelque soit le temps de pose total.
- Pour calculer le temps de pose unitaire minimum, le bruit de fond de ciel doit être au moins 3 fois supérieur à l'ensemble des autres bruits *.
- L'amplitude du bruit est caractérisée par son écart-type ou sigma. C'est ce qu'on appelle la règle des 3 sigma.
* Je vous invite pour en savoir plus à lire ces 2 topics intéressants :
et
Pour trouver la valeur du bruit de fond de ciel, il faut donc éliminer les autres bruits ou signaux parasites.
- Les pixels chauds/froids d'origine thermique s'éliminent avec une soustraction de dark, le bruit thermique quant à lui est parfaitement négligeable sur les CMOS.
- Idéalement il faut également faire un flat pour éliminer le vignetage et les poussières sur le capteur qui pourraient fausser les mesures.
- Le bruit de lecture ne peut pas s'éliminer, il faut donc le déterminer en le mesurant sur un bias (offset) unique.
Si le sigma du fond de ciel est supérieur à 3x le sigma de l'offset alors le temps de pose unitaire est suffisant pour sortir les plus faibles signaux.
Temps de pose unitaire maximum
Si on considère le bruit de photons (convertis en électrons) sous un ciel sans aucune pollution lumineuse, sans Lune et au zénith, on a une formule qui donne le rapport signal / bruit (RSB) :
- RSB = nombre d'électrons / racine (nombre d'électrons).
Si on reprend l'exemple de l'ASI2600MC plus haut :
- A gain zéro, le RSB max est donc de 50.000 / racine (50.000) = 223
- A gain 100, le RSB max est de 18.000 / racine (18.000) = 134
Il peut donc être intéressant de travailler à gain 0 dans le cas où on a besoin d'un RSB important.
- Si on travaille sous un ciel bien noir sans aucune pollution lumineuse (PL) ni présence de Lune, alors rien n'interdit de poser le plus longtemps possible (à conditions de ne pas saturer des zones sensibles).
-
En revanche la pollution lumineuse et la présence de la Lune vont contribuer à faire monter le bruit de fond de ciel à des valeurs parfois indécentes allant jusqu'à saturation du capteur (image toute blanche !).
Il faut donc faire très attention dans ces 2 cas-là (PL et Lune) à ne pas poser trop longtemps car le fond de ciel va monter inexorablement et va noyer les faibles signaux dans le bruit photonique.
En pratique on essaiera de rester entre 3x et 5x sigma et on multipliera les poses.
L'utilisation de filtres anti-PL, h-alpha ou multibandes contribuera également à augmenter le signal tout en maîtrisant le bruit de fond de ciel.
Comment calculer les 3 sigma sous Siril ?
-
Sous SiriL, on ouvre une des brutes calibrées sur laquelle on a déjà retiré Dark et Flat.
Attention, pour les possesseurs d'APN, n'ouvrez pas directement un fichier RAW, sinon les valeurs seront faussées. Il faut travailler sur des fichier FIT impérativement. - Si on a déjà traité avec un script Pré-traitement_xx, alors on va dans le dossier Process et on prend un fichier pp_brute.fit (pre-processed) ou éventuellement une brute calibrée et alignée r_pp_brute.fit (registered).
- Si on travaille sur une caméra couleur, on n'oublie pas de cocher 'dématriçage' au moment d'ouvrir l'image.
-
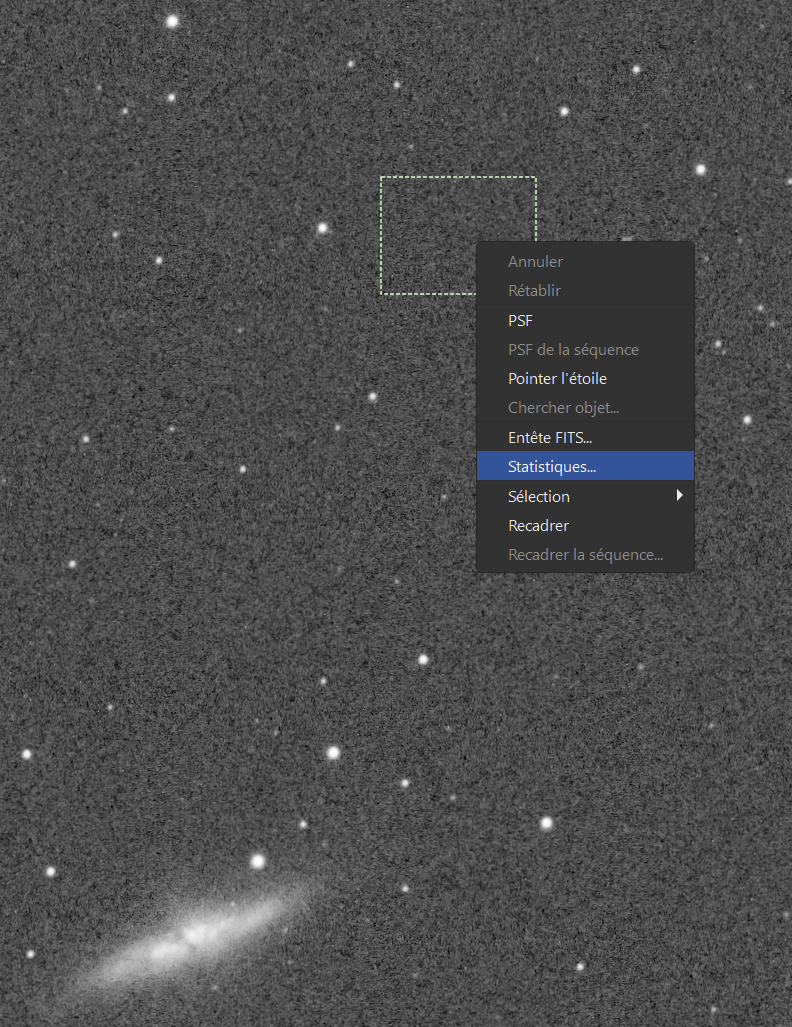
Puis on zoome au maximum dans l'image et on trace un cadre d'environ 100x100 dans le fond de ciel sans étoiles ni nébulosités, clic droit et Statistiques :

-
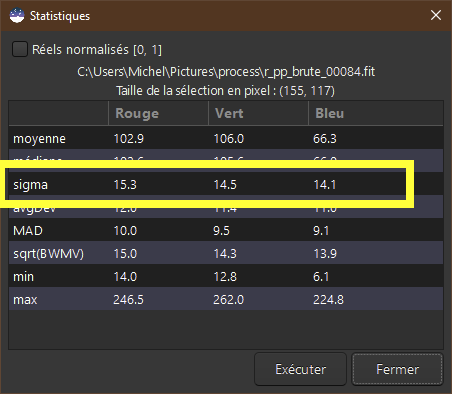
Ce qui donne ceci :
- La valeur sigma représente l'écart-type de l'ensemble des bruits. Vu qu'on travaille sur une image déjà calibrée, les seuls bruits qui restent ici sont le bruit de fond de ciel (ou le bruit photonique) et le bruit de lecture.
-
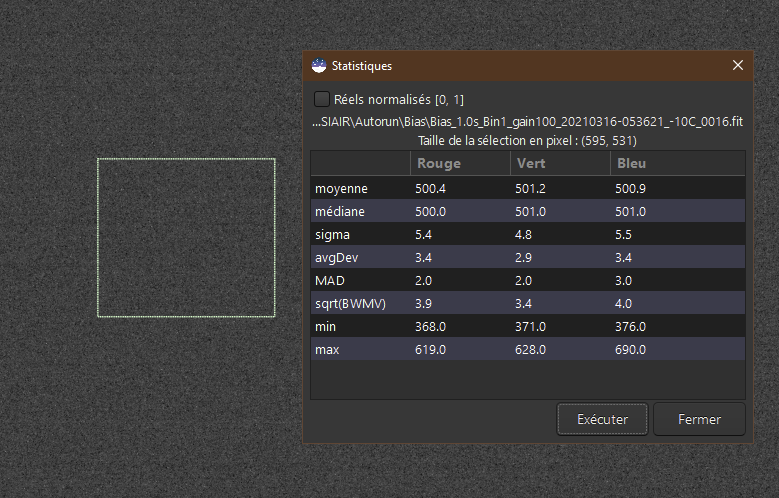
Maintenant on ouvre un bias (offset) unique (pas un master_bias) réalisé au même gain ou ISO puis on procède de la même façon :
- Dans ce cas précis d'un temps de pose court, et dans le noir complet, le sigma du bias va nous donner l'ensemble des bruits qui se résume au bruit de lecture.
- On fait maintenant sigma brute / sigma offset : 14.5 / 4.8 = 3.02
Avec un temps de pose de 120s, sous ce très bon ciel sans Lune, au zénith et avec un filtre Optolong L-Pro, j'étais donc pile-poil à 3x sigma
J'aurais donc pu poser unitairement plus longtemps, mais les cibles choisies auraient pu saturer (notamment le coeur de M81 dans l'exemple ci-dessus qui sature très vite).
C'est pourquoi j'ai choisi de rester à 3x sigma et de multiplier les poses.
-
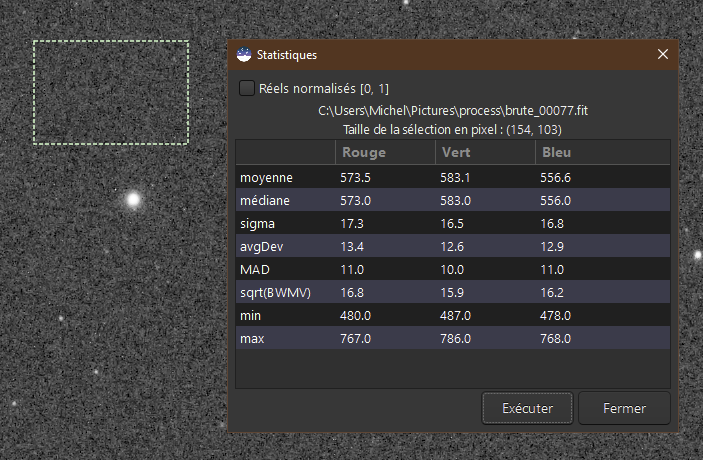
Si on veut mesurer très rapidement son sigma pour avoir une idée approximative, on peut aussi prendre une brute non calibrée. La différence n'est pas énorme, comme on le voit ci-dessous :
- Nous obtenons un sigma de 16.5 au lieu de 14.5 sur la brute non calibrée (normal puisqu'on a toujours le bruit thermique dans l'image, qui est avec les nouveaux capteur CMOS franchement négligeable).
-
16.5 / 4.8 = 3.43, on a une différence de 13% entre la calibrée et la non-calibrée
Pour la suite, si vous réalisez toujours vos images au même gain, vous pourrez ainsi déterminer votre sigma rapidement car l'offset ne change pas, son sigma est constant.
Ici pour cette caméra et à gain 100, je sais que le sigma de mon offset est autour de 5.
Il sera ainsi très rapide de mesurer le sigma du fond de ciel sur mes images brutes ultérieures non calibrées, de le diviser par 5 et de retirer environ 15% au résultat.
Le sigma de mon fond de ciel sur mes brutes non calibrées devra donc se situer quelque part entre 18 et 30.
Pour finir je vous montre quand même l'image finale de cette séance réalisée avec 70 poses de 120s, empilées sous SiriL et post-traitée sous CS5.
Double-clic dans l'image pour obtenir la full :
Exemple sous un ciel pollué
Un autre exemple, cette fois sous un ciel extrêmement pollué (depuis mon jardin parisien à 3km du périphérique !) et sous une Lune très présente :
-
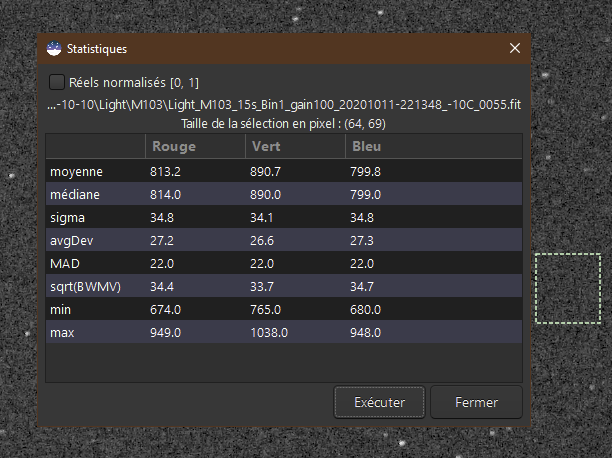
15 secondes de pose seulement, filtre L-Pro (pourtant anti-pollution) :
On a vu plus haut que le sigma de mon offset est de 5.
En 15 secondes de pose seulement, le bruit du fond de ciel est déjà monté à 6x le bruit de lecture (34.1 / 5 - 15%).
-
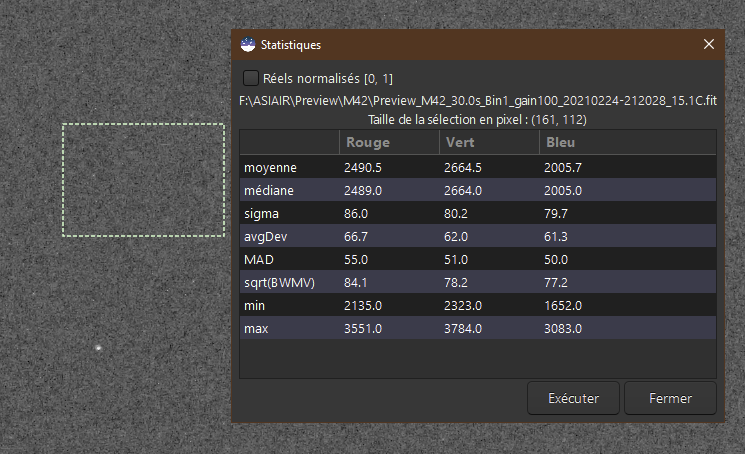
30 secondes de pose, toujours filtre L-Pro :
Nous sommes cette fois à 14x sigma en seulement 30 secondes de pose (80.2 / 5 - 15%) !
La moyenne du fond de ciel atteint déjà la valeur de 2664 ADU !!
Si je continuais à monter le temps de pose unitaire dans ces conditions, j'arriverais à saturation des pixels uniquement avec le bruit photonique en moins de 5 ou 10 minutes avec pour conséquence une image toute blanche !
Sans aucun filtre, cette saturation par le bruit photonique serait arrivée bien avant, sans doute en moins de 5 minutes !!!
C'est pour cette raison que sous un ciel pollué, il faut essayer de ne pas dépasser 5x sigma dans la mesure du possible, y-compris avec un filtre.
-
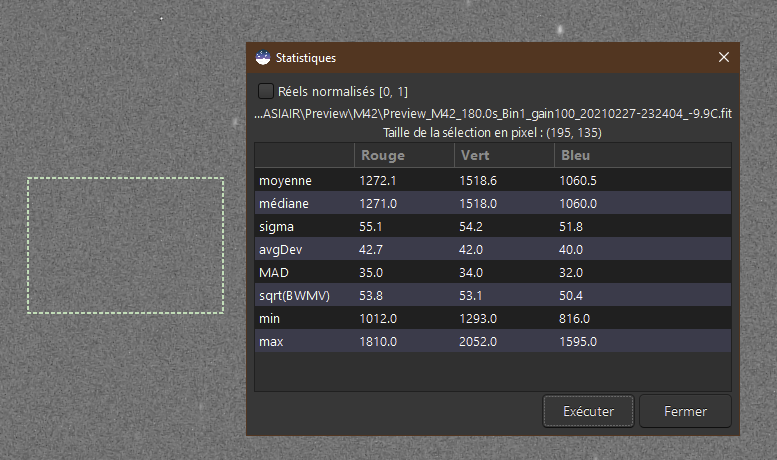
Je retire cette fois le filtre L-Pro et je le remplace par le L-Extrême (filtre multibandes, voir mon autre article sur les filtres.
180 secondes de pose cette fois, toujours dans les mêmes conditions de ciel en pointant M42 très proche de la Lune gibbeuse :
Cette fois, le bruit de fond de ciel est relativement bien contenu avec 9x sigma en 180 secondes de pose (54.2 / 5 - 15%), à comparer avec les 14x sigma en seulement 30 secondes du L-Pro.
Ces filtres sont tout de même assez miraculeux, comme on peut le voir avec cette image réalisée la veille du Solstice d'été (pas de nuit astronomique), dans mon jardin parisien et sous une Lune assez présente.
55 poses de 180 secondes avec l'ASI2600MC et le filtre L-Extrême.
Double-clic pour obtenir la full :
super travail de présentation
j'ai néanmoins une petite question quand je fais la même chose chez moi j'ai des écarts important entre les différents canaux RVB
par exemple sur un offset j'obtiens les valeurs ci jointes, il en est de même avec les brutes
du coup quelle est la valeur a retenir pour le calcul des 3 sigma -
KSTARS 3.6.6
dans Software
Le 05/08/2023 à 10:32, rmor51 a dit :Mouture provisoire du manuel de la V3.6.6, pas mal de lecture et de grattage de crâne sur les nouvelles fonctions du module Mise au point.
Manuel utilisateur Kstars-Ekos v3.6.6.pdf 10.14 Mo · 9 downloads
petit soucis d'affichage sur la page 75 me semble t il
super travail
Merci -
-
est ce que certains d'entre vous utilisent des scripts de shutdown dans le planificateur
au dela de parquer la monture j'aimerai arrêter ekos et couper l'alim des équipements
-
Le 08/09/2022 à 18:17, zoubidou67 a dit :
D'après ce que j'ai pu voir sur le site https://apps.kde.org/fr/kstars/ , Kstars-Ekos semble ne fonctionner que sur Linux et Windows. Donc pas sur Mac. Dommage, car cela m'aurait aussi arrangé de pouvoir utiliser le Macbook en sauvegarde pour le cas où je viendrais à avoir un souci de batterie sur le pc.
IL fonctionne également sur Mac
-
ok je vais chercher
-
bonjour à vous
est il possible avec le planificateur de parquer la monture en fin de séance
d’arrêter EKOS , Kstars et le Raspberry ?
-
bonjour depuis le passage à la version 3.6.0 je n'arrête pas d'avoir des soucis
au début je pensais que cela venait de mon Raspberry PI4 qui a un port USB abimémais avec un autre PI neuf, même soucis, il n'arrive pas à affecter correctement les ports - a souligner que j'utilise également un pegasus power box advance.
après de longues heures de test, problèmes de ports semble être réglés
maintenant, soucis avec la fonction recherche de cible, avec fonction Crtl+F ou depuis le Mount Controldans tous les cas Kstars crash
retour a la version 3.5.9 et la miracle tout refonctionne correctement
suis je seul dans ce cas là
Crdlt
-
bonjour
j'utilise Ekos/Indi sur Raspberry PI4 tout fonctionne correctement
a l’exception de la température de la caméra que le système ne parvient à mémoriser
je suis obligé de renseigner la consigne régulièrement
quelqu'un a t il rencontré ce pb et si oui a t il une solution à partager
Crdlt
-
version 3.5.9 dispo depuis aujourd'hui
a suivre
-
bonjour
la mise à jour est disponible depuis aujourd'hui
et à priori fixe les problèmes
pas fais le tour complet néanmoins
-
bonjour
j'ai eu jassem la personne en charge de cette apple problème vient de la langue choisie
si tout est en anglais ( PI4 + Stellarmate) tout fonctionne correctement
devrait être corrigé dans la nouvelle version
-
bonjour
j'essaye d'utiliser stellarmate sur ipad vers il semblerait qu'il y ait quelques soucis avec cette version 2.5.0
sur la gestion de la monture les boutons de park / unpark semblent ne pas fonctionner
rencontrez vous le même soucis
-
est ce que la traduction que tu as faite et également utilisée pour stellarmate sur Ipad
ou s'agit il d'un autre fichier a updater?
-
peut être que cela n'est pas le bon endroit mais ou trouver des explications sur la gestion et utilisation de l'histogramme dans une image fits
je ne trouve rien de spécifique -
Il y a 11 heures, rmor51 a dit :
La traduction française de KSTARS-EKOS est terminée. La prochaine distribution l'intégrera. Et le déverminage pourra avoir lieu ! Merci d'avance.
super et merci pout tout cet engagement
quand est ce que cette nouvelle version doit voir le jour -
bonjour
existe t il un moyen d'avoir les info du sigma d'une brute sous ekos comme cela existe sur SIRIL statistique ?
crdlt
-
bonjour je viens de passer en 3.5.8
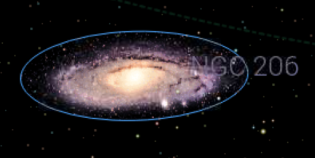
et je n'ai plus les noms Messiers pour les objets du ciel profonds
par exemple pour M31 le nom affiché est uniquement NGC206
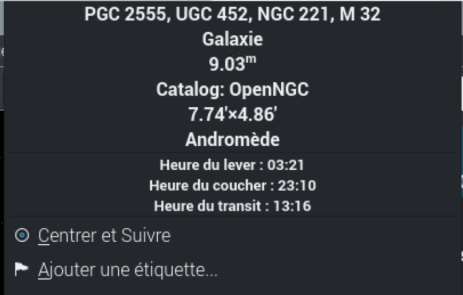
et si un fait un clic droit voici le détail
pb de catalogue ?

Alignement sur Ekos
dans Astrophotographie
Posté
en ce qui me concerne j'ai également remonté un bug,
je ne sais s'il est lié à cette nouvelle version ou à mon changement de monture, car pas de souci précédament .
je suis passé d'une EQ6-R pro à une ZWO AM5.
voici le détail de mon soucis:
lorsque je clique sur le bouton "unpark" depuis le module Ekos- Monture,, j'ai un message dans un popup me disant que la monture est déparquée,
Mais il n'en ai rien, quand on va sur les log Indi, rien pas de message.
Idem depuis kstars Monture déparque, et si un fais un Goto, j'ai un message disant que rien ne peut être fait avec la monture parquée .
en fait la solution que j'ai trouvée c'est de clicqueren premier sur suivi et ensuite sur unpark,
Et là cela fonctione,
et dans les log, suite au clic de " unpark" j'ai un message " Mount deja déparqée"
Bizarre
si cela peut aider des pesonnes avec le même soucis en attendant la résoultion du bug.