RemyB
-
Compteur de contenus
143 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par RemyB
-
Banc de test Ronchi/Foucault imprimable en 3D.
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Salut, En effet il y a pas mal de programmes open source intéressants Merci pour les infos. J'ai commencé à remixer le banc de test de Hack'n Splice, il me reste à ajouter un support pour reflex(450d) et l'entrainement pour chaque axe. Pour le mouvement en Y, je vais utiliser une vis à bille. Pour l'axe X, une simple vis sans fin T8 fera l'affaire, la précision de positionnement étant moins critique?
-
Banc de test Ronchi/Foucault imprimable en 3D.
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Bonjour Eric, Merci pour ton retour, c'est le genre d'informations qu'il me manque. Pas de soucis pour ajouter un mode automatique via le menu qui se déplacerait sur une distance donnée et déclenche un appareil photo à intervalle régulière. La sortie "spindle"(moteur fraiseuse on/off) sera dédiée à ça. Il existe déjà du software open source pour analyser les photos ? Concernant la manette de jeu, hier je suis allé acheter la "battletron" de chez action, à 18euro. https://www.action.com/fr-be/p/3013054/manette-de-jeu-battletron/ J'ai testé plusieurs libs pour qu'elle soient prise en charge par esp32. Une sort clairement du lot c'est Bluepad32. https://github.com/ricardoquesada/bluepad32 C'est une lib qui permet de gérer à peu près toutes les manettes bluetooth du marché, un couteau suisse. Bluepad32 fonctionne aussi bien avec une manette officielle PS4, Wii, Xbox ou la Battletron et autres copies bon marché. Et dans la mesure du possible, Bluepad32 donne toujours les mêmes données en sortie quelque soit la manette. Ce qui permet de changer de manette sans prévoir d'adaptation de code pour l'application voulue. Pour 18euro cela fourni pas mal de boutons digitaux et analogiques. L'envoi de données à la manette fonctionne aussi(couleur led, vibrations).
-
Banc de test Ronchi/Foucault imprimable en 3D.
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Pour ce qui est de la précision, en boucle ouverte comme ici, elle sera du Backlash de la vis à bille, lorsqu'il y a un changement de direction. Si la séquence de mesure progresse dans le même sens(après avoir fait un home sur Y et un fin de course?)la précision est améliorée. Sinon pour s'en affranchir il faut utiliser une boucle fermée. Soit des encodeurs ou un contrôle sur les mouvements du moteur stepper. Il y a peu de chance qu'un moteur(de bonne qualité) loupe un step, il n'y a pas de contrainte mécanique énorme, juste déplacer un plateau de mesure. -
Banc de test Ronchi/Foucault imprimable en 3D.
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Un peu comme les steps/mm d'une imprimante 3d. La plupart des libraires de gestion stepper propose un paramètre pour cela. Après pour le calcul pic vallée, valeur lambda, côté code ça doit pas être bien compliqué mais je n'ai aucune idée du protocole a automatiser. Jamais fait ce genre de test. Il faut voir une fois.. -
Banc de test Ronchi/Foucault imprimable en 3D.
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Ce sera comparé avec un comparateur bien sûr, sinon cela ne sert à rien évidemment. En jouant sur la variable de démultiplication cela peut être étalonné -
Banc de test Ronchi/Foucault imprimable en 3D.
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Voilà, c'est bien plus simple avec un pad PS4 et ça libère les gpio pour d'autres fonctions. J'utilise la lib PS4-esp32. Haut/bas de la croix directionnelle pour l'axe Y, step par step. L1/L2 pour un déplacement rapide sur Y. -
Banc de test Ronchi/Foucault imprimable en 3D.
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
L'écran utilisé pour l'instant est un 0.96" oled ssd1306 noname 128x64. La lib d'affichage est u8g2, assez connu et adaptable facilement à d'autres écrans. Possibilité d'afficher du texte et des graphismes. La gestion moteur est basée sur des librairies existantes, pour l'instant je n'ai pas implémenté la gestion de communication avec les drivers(tmcxxx). Il y a un port série et un port SPI disponible si besoin. Utiliser une manette de jeux en Bluetooth peut s'avérer intéressant plutôt que de cabler plusieurs boutons sur les gpio(les garder pour d'autres fonctionnalités plus tard)... -
Banc de test Ronchi/Foucault imprimable en 3D.
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Sinon à partir du moment ou la mesure est numérique, il y a possiblité de faire un calcul et afficher d'autres valeurs. Comme prévoir un tableau de relevé à l'écran(ou via une app, l'esp32 est wifi/bt) permettant de calculer le Lambda ou autre valeur intéressante à l'écran. Ou générer un CSV à traiter sur pc... N'hésitez pas à suggérer des idées qui donnerait une réelle plus value à cette mesure numérique. Je n'ai aucune connaissance de ces tests et de ce qui pourrait faciliter la tache.. -
Réalisation anneaux de télescope en impression 3D
RemyB a répondu à un sujet de Tyru dans Les bricoleurs
Salut Pascal, Belle réalisation, tu as déjà testé avec quelques contraintes cela ne casse pas ? Je ne sais pas combien pèse ta lunette, mais j'aurais peut-être vu des colliers plus larges.. Pour l'extérieur, quelque soit le matériaux utilisé(plus ou moins adapté), je te conseille d'imprimer dans la mesure du possible en blanc. En plein soleil, cela fait quelques degrés en moins au niveau de la pièce, cela évite d'autant plus qu'elle ne se ramollisse. Cordialement -
Banc de test Ronchi/Foucault imprimable en 3D.
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
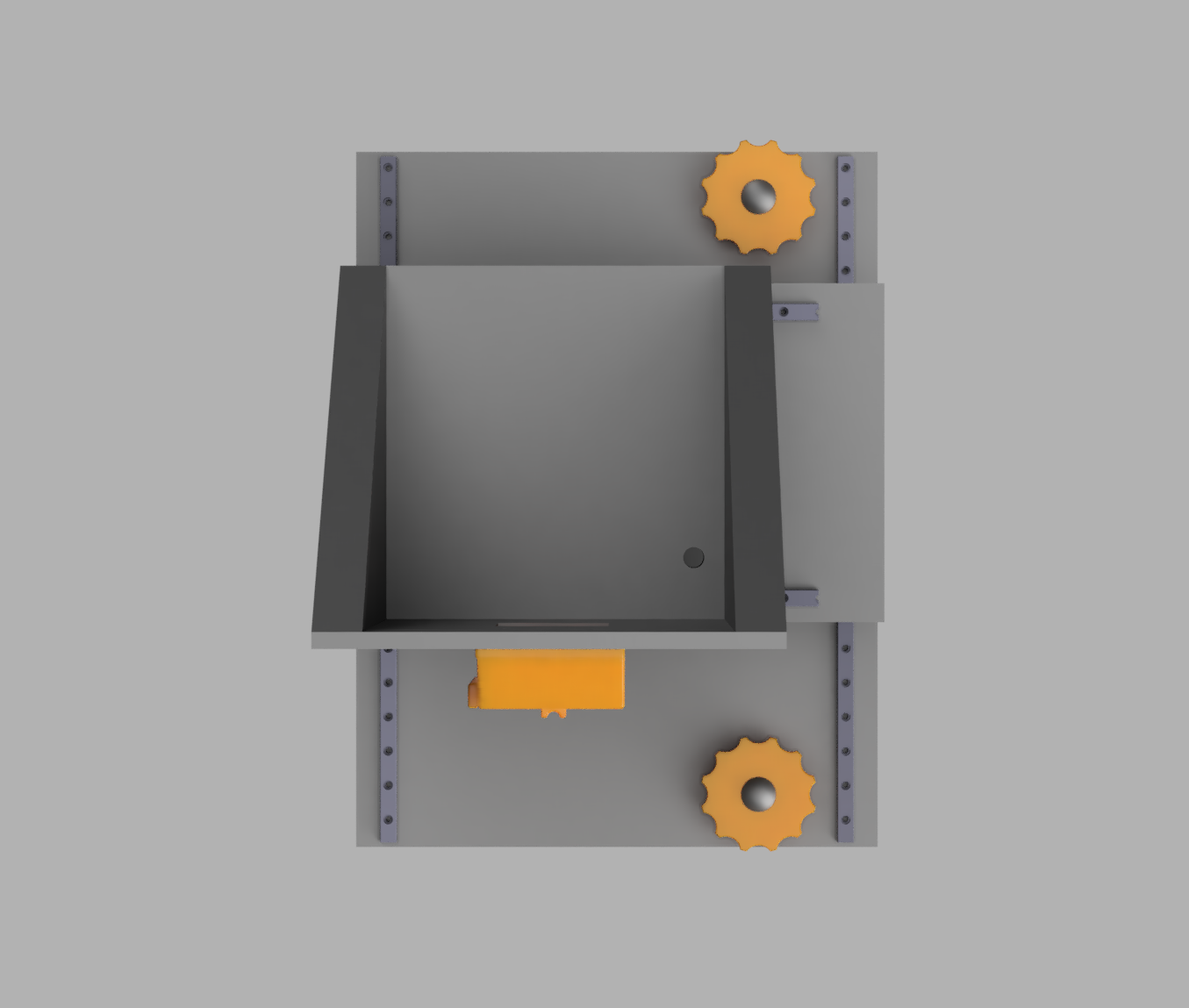
Salut, J'ai avancé un peu sur la commande et motorisation de l'axe y, à la place du micromètre. La base est posée pour le code. En remplacement de la vis sans fin classique et le micrometre pour l'axe Y, je vais utiliser une vis à bille(sku1204 ou similaire) et des rails linéaires. Le tout commandé par ce montage(mis au propre :)). Il manque encore un debounce pour les boutons. Une fonction pression courte/longue (déplacement par step et déplacement rapide).. Le moteur bouge, mais ce sont des 1/16steps qui sont envoyés( sur l'écran première ligne les steps, deuxième ligne en micromètre, troisième ligne debug boutons). Une démultiplication sera utilisée et le coefficient pour être défini dans le code(ou via un menu config..) Si ça devrait le faire. Il sera possible de définir une valeur de Backlash si besoin, bien qu'il soit très limité avec la vis à bille. Wemos D1 R32(esp32), CNC Shield, deux boutons par axe. -
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
J'ai oublié de préciser que la poulie 64dents se fixe avec ce genre de vis. Il y a 4 trous décalés a 90°.
-
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
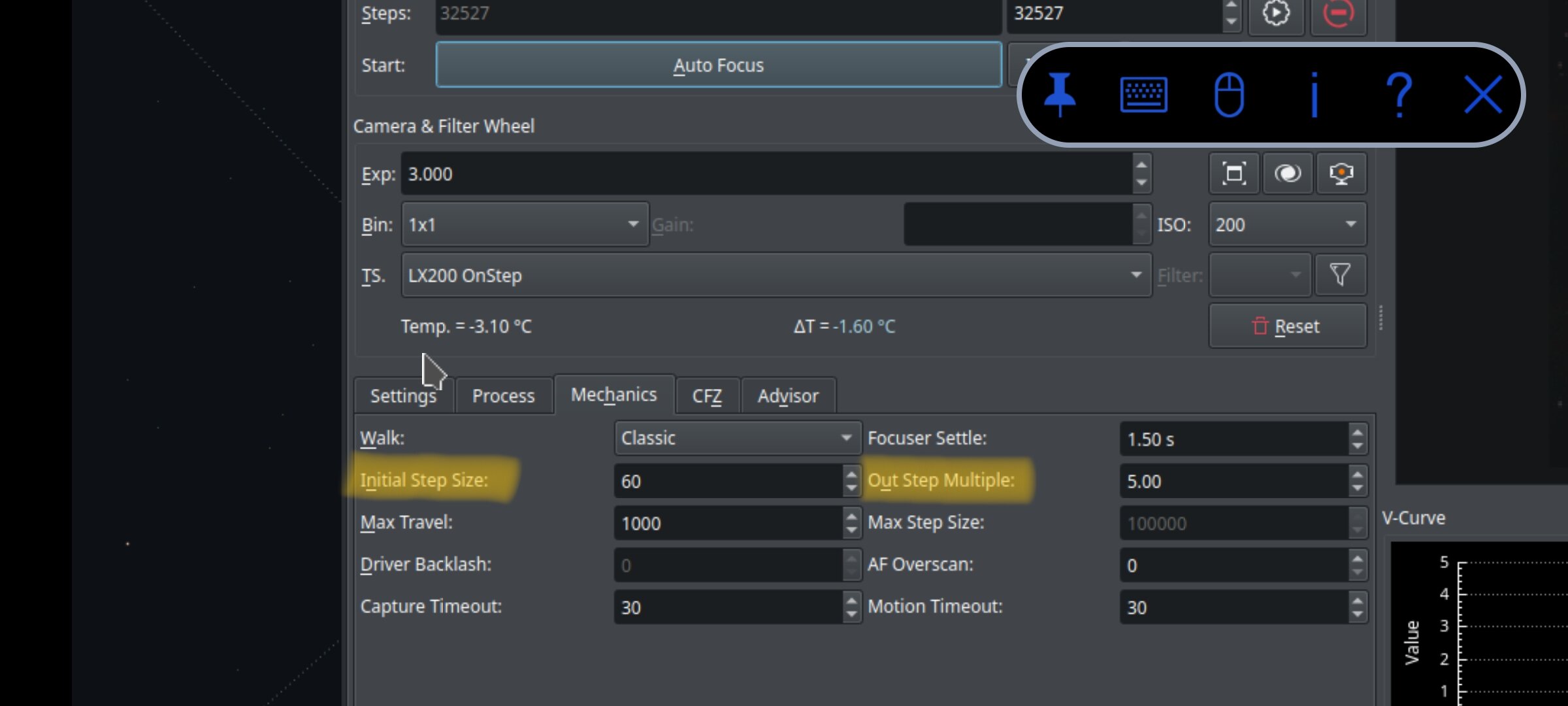
Voilà sur quels paramètres j'ai fais des tests cette nuit, pour la partie mécanique.(surligné) En diminuant le nombre de steps et en modifiant le multiplicateur tu vas modifier l'excursion. Le premier déplacement= initial step size* out step multiple. Pour ma part si la valeur est trop grande, le focus se retrouve a gérer les étoiles en forme de donuts et il fait n'importe quoi. Si la première excursion est moins grande, les étoiles sont en patates mais encore suffisamment rondes que pour faire une mesure correcte. Pour la détection je laisse par défaut les paramètres et ça fonctionne bien. J'ai pu faire une cinquantaine de tests avant que le ciel ne se couvre et j'ai été agréablement étonné des solutions proposées, il y a de l'espoir 😁 J'ai quand même laissé le scope passer la nuit dehors pour voir comment se comporte le chauffage avec une température qui a chuté a -6° Aucune buée sur le correcteur de coma, ni sur le miroir principal (ventilo allumé tout le temps). Cycle pwm de la résistance du correcteur de coma 60%. Donc il n'est pas encore au taquet à -6°. J'ai une résistance totale du montage de résistances de 120Ohm, alimentés en 24V, soit 4.8W. Un légère buée sur le secondaire, il faut que je l'équipe de résistances également.
-
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
J'ai suivi les vidéos de Lazy Geek avec son 150/750. Pour ma part je pense qu'il est important de partir d'une position ou le focus est déja bon manuellement avant de démarrer l'autofocus. Ensuite de limiter l'excursion du focus pour éviter l'apparation des "donuts" du Newton. Les donuts troublent certainement l'algo de calcul du rayon de l'étoile. En résumé n'autoriser qu'un faible deplacement du focus par rapport au point initial, ca doit aider la procédure. J'aurai peut être l'occasion de faire quelques tests ce soir et demain soir, si la météo se confirme. -
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Salut, Je t'invite à mettre à jour la suite Kstars/Ekos/Indi, de nombreux bugs ont été corrigés dans la version de décembre. Je pense que cela contribue au succès de mon autofocus maintenant. Il y a avait des soucis mécaniques mais aussi parfois des réactions bizarre de l'autofocus, qui ont fait l'objet de discussions sur le forum indi. Notamment le choix de la solution de l'autofocus pas toujours cohérent. Pour tester la dernière version, le plus simple est d'utiliser le release Astroarch. Ensuite dans le terminal taper(avec une connexion internet sur le rpi) : update-astroarch Tu auras ensuite la dernière version de la suite complète. Astroarch ne fonctionne qu'en VNC. https://github.com/devDucks/astroarch -
Chercheur 9/50 SW en guise de lunette Guide
RemyB a répondu à un sujet de Jacques0563 dans Matériel astrophotographique
Salut, Je remonte le sujet, ayant converti un finder 8X50 GSO(TS optics,..) en guidescope avec Zwo 120mm mini, en utilisant ce fichier 3D: https://www.thingiverse.com/thing:5896375/files Cordialement -
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Salut, Qu'est ce que tu as comme soucis avec le focuser SW ? Voiçi le fichier 3D du profil de montage pour les résistances de chauffe du correcteur de coma. astrodewheatercoma.stl -
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
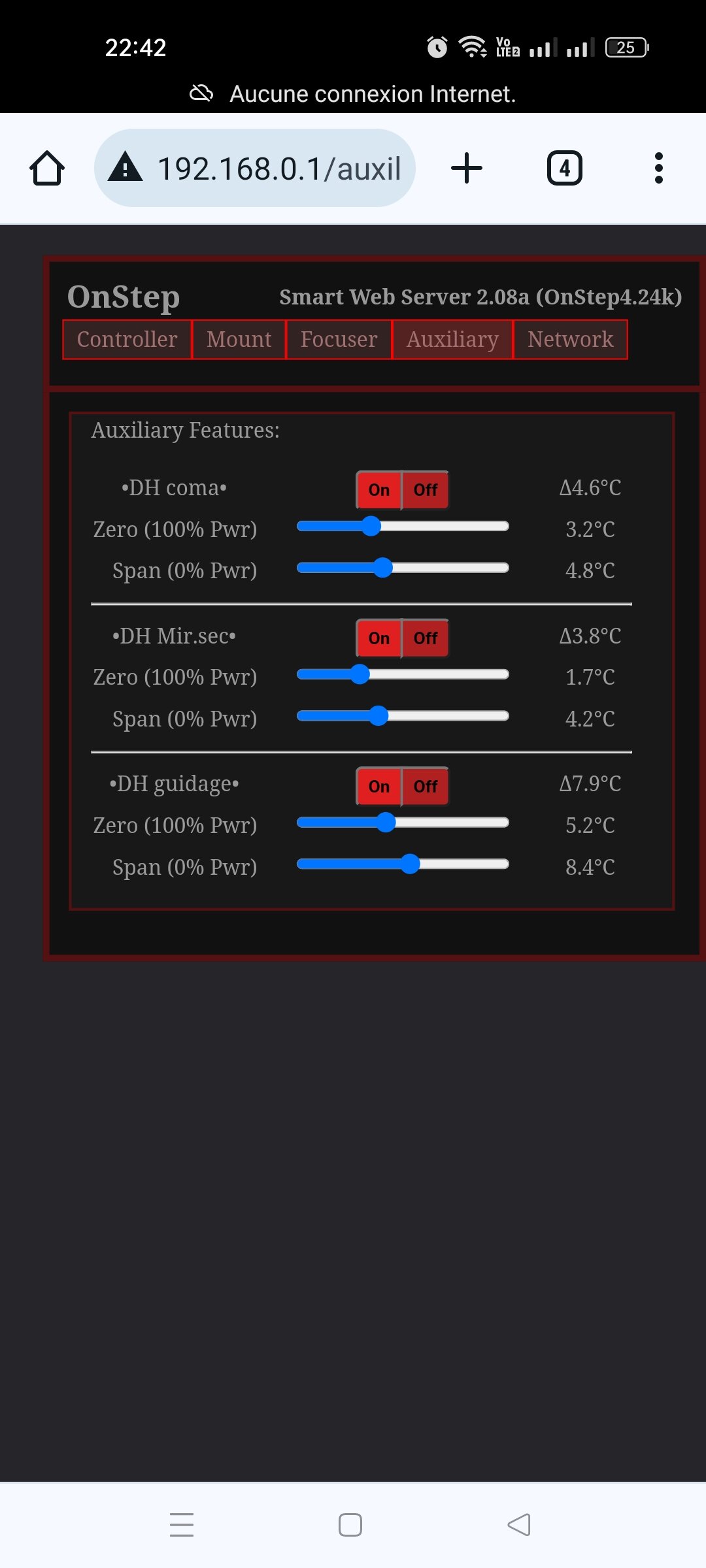
A l'issue des tests je ferai une synthèse pour les réglages, c'est fini pour aujourd'hui, le ciel restera couvert le reste de la nuit. La suite vendredi si tout va bien. Côté chauffage(DEW_HEATER), dehors cette fois et pas dans le garage, ça fonctionne bien La régulation est nickel, la température de chauffe reste dans la plage demandée et le pwm est a +-40%. Il y a encore de la marge pour que ça fonctionne avec une température extérieure plus basse. Seul regret, la section dew heaters n'est pas parametrisable(pour l'instant) via le driver indi. Obligé de se connecter via un esp8266(web server Onstep) pour le configurer. Mais bon une fois configuré logiquement la régulation fait son job au démarrage du contrôleur, pas besoin de s'en préoccuper. Un retour numérique des valeurs dans un onglet du driver indi serait appréciable Le BME280 par contre semble trop près du contrôleur(et sa dissipation thermique) , il indique 4° au lieu de -1°. A peaufiner.
-
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Si tu veux je t'envoie un roulement pour tester.. Entre quelques nuages, je lance des séquences d'autofocus, et le résultat est toujours cohérent. Ca fait plaisir. Cela permet de noter le nombre de steps de correction en fonction de la chute de température. Encore peu de données mais ca tourne aux alentours de -60steps pour un degré en moins. Je constate aussi que le déplacement du focus est un peu trop rapide, trop brutal.. Il est de 800µm/s dans le paramètrage onstep(AXIS4_SLEW_RATE_DESIRED) je vais le redescendre de moitié. Dans l'onglet mechanics, pour un Newton GSO 8" équipé du monorail, j'ai les valeurs suivantes qui fonctionnent pas trop mal(en 32 microsteps). Initial step size: 100 Max travel: 400 Out Step Multiple 4 Le reste par défaut. -
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
J'ai oublié de préciser le roulement utilisé, c'est un 688z 8/16/18mm. Si besoin je peux envoyer sous enveloppe il m'en reste
-
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
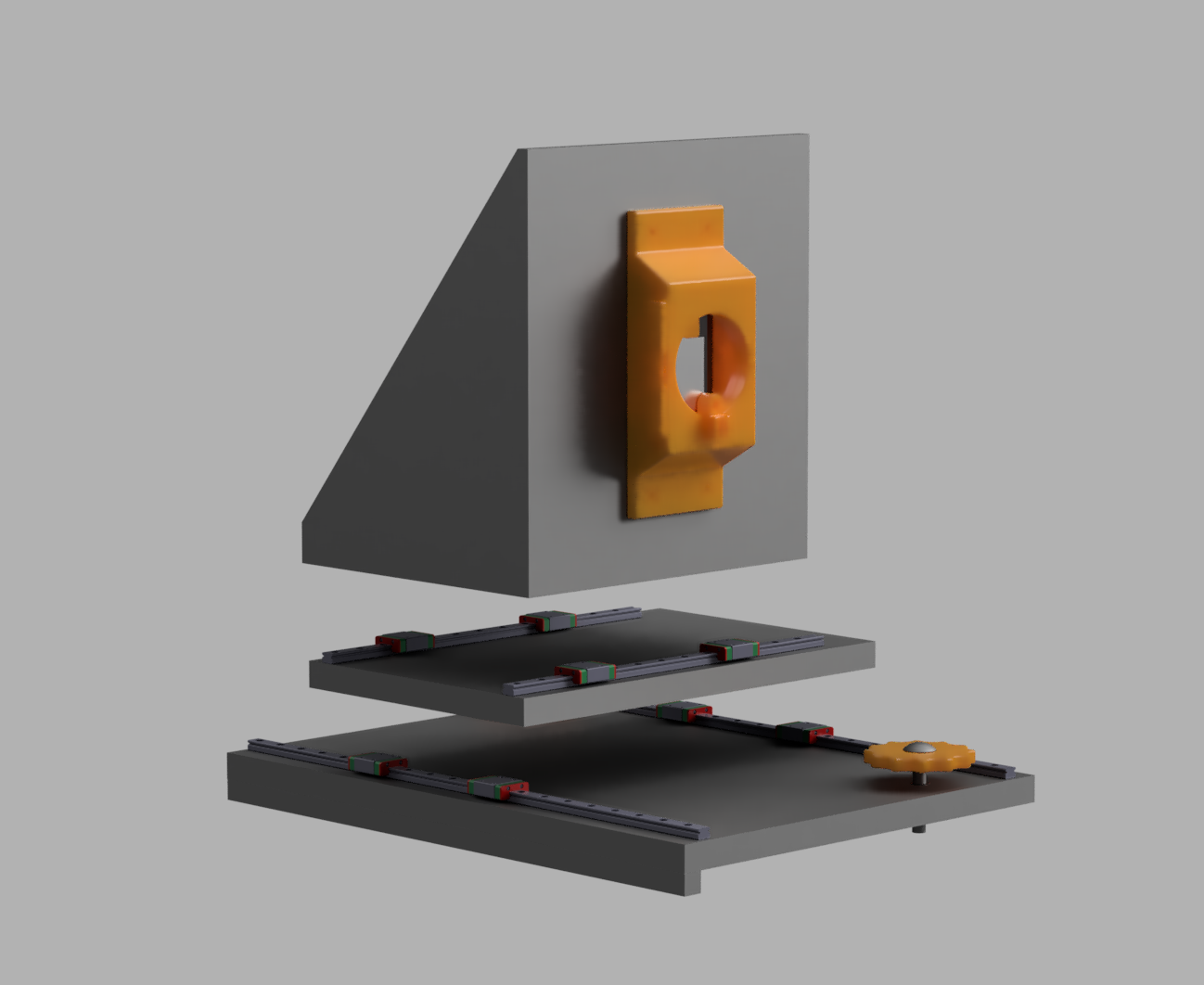
Salut, Voici une photo du modèle utilisé. +-97mm mesure à l'intérieur. Cordialement
-
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
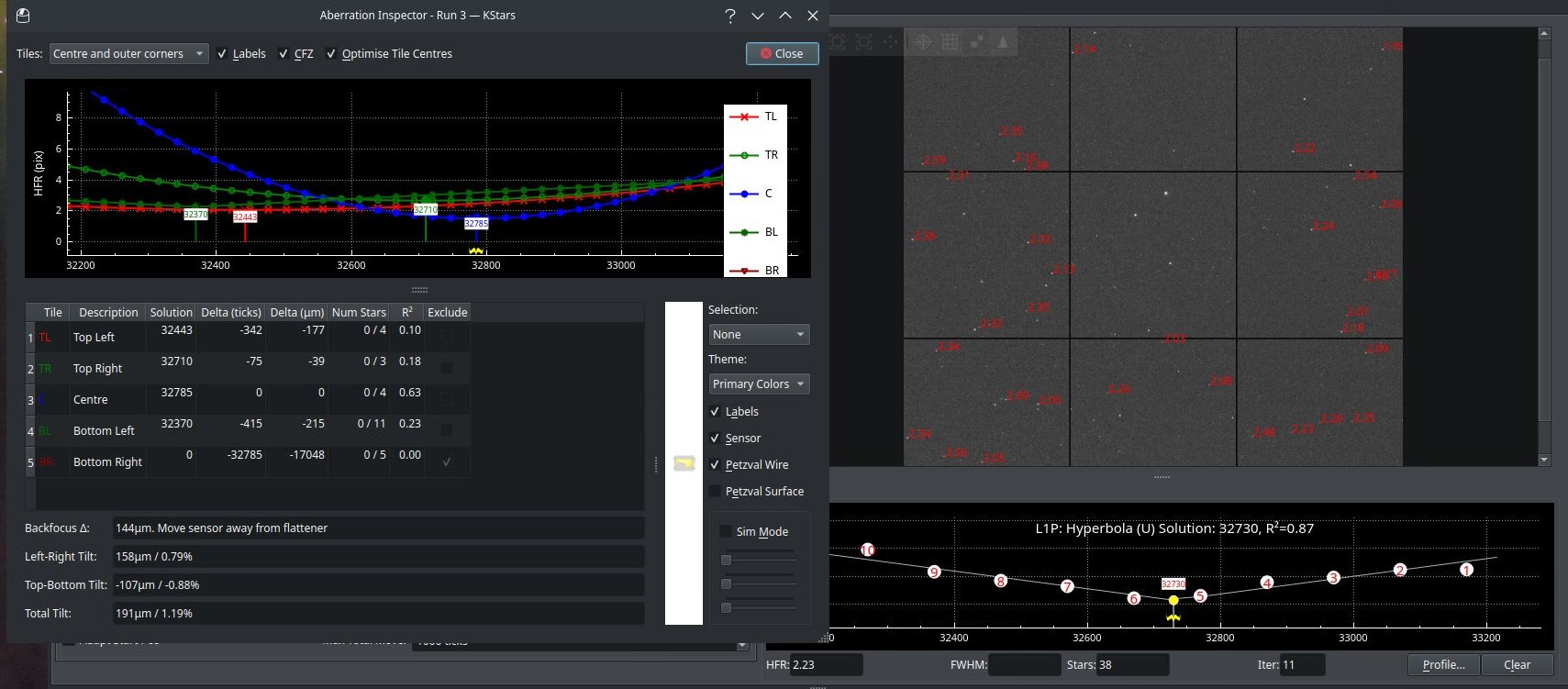
Quelques tests ce soir tant que le ciel est plus ou moins dégagé. L'autofocus fonctionne. Les paramètres sont à optimiser... voilà le premier test. Il faut diminuer l'amplitude du test. Sinon je découvre les résultats de l'abberation inspector. Le backfocus semble ok, un peu de tilt à régler si j'ai bien décrypté. Mais avant de regarder au tilt je vais fiabiliser le test autofocus et vérifier que les résultats sont toujours identiques. Mécaniquement ca n'a plus rien à voir, je n'ai même pas défini de backlash et ca semble se déplacer correctement, sans glissement ou décalage. Test avec D5300+maxfield au niveau poids.
-
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Salut, He bien c'est la base de toute la démarche d'optimisation, les mêmes problèmes que toi. Résultats non fiables de l'autofocus. J'en suis arrivé à la conclusion que c'est du au glissement de l'axe sur le rail. C'est pas énorme mais à chaque inversion de sens de rotation, il y a des steps qui se perdent dans le mécanisme.. Ici cela semble corrigé. En espérant que ça tienne dans le temps. J'attends avec impatience quelques heures claires pour tester à nouveau. Voir si j'obtiens une belle courbe en V.. Concernant Kstars, les paramètres mécaniques jouent beaucoup dans la réussite de la procédure d'autofocus. Il ne faut pas trop s'écarter (en nombre de steps) du point de focus "manuel" optimal, sinon il fait n'importe quoi. Il y a eu pas mal de bug fix dans la dernière version de décembre. Et surtout, un nouveau module "aberration inspector" qui semble bien pratique(similaire à celui de NINA) pour évaluer le tilt et backfocus du capteur. Pas encore testé. Cordialement -
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Merci pour l'info -
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Salut, J'ai laissé tourner une nuit dehors la résistance coma et la puissance est suffisante. Avec la régulation la chaleur est à peine perceptible au toucher. Mais elle fait son job, la régulation PID/pwm est stable, la t° se cale sur les consignes données via Onstep. Reste a fignoler le câblage (gaine noire matte, fixation..) Je peux remonter le focuser définitivement et passer au miroir secondaire.. cordialement -
Focuser monorail, le mal-aimé (optimisation)
RemyB a répondu à un sujet de RemyB dans Les bricoleurs
Salut, J'ai peint le montage a la bombe noire haute température en effet, principalement pour éviter les réflexions sur les soudures. Cordialement