Lumotori
-
Compteur de contenus
6 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par Lumotori
-
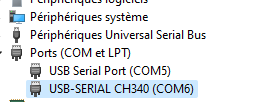
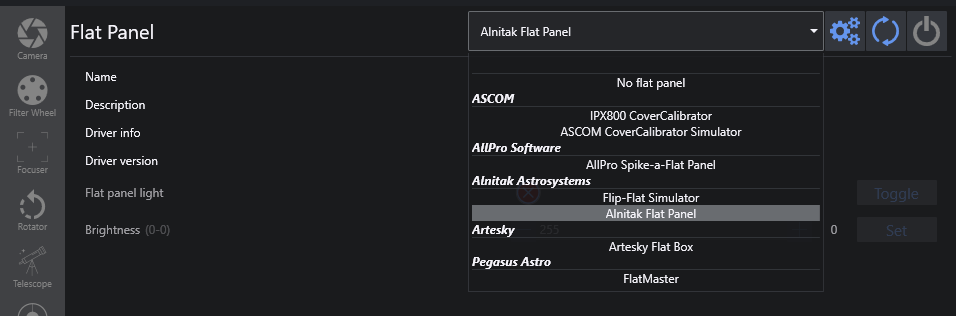
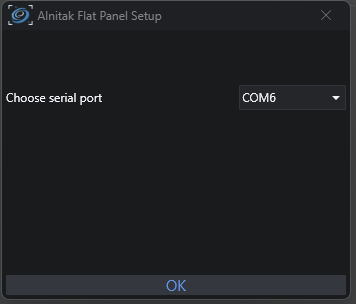
Bonjour @BenClark Pour commencer il faut contrôler que l'Arduino est visible dans le gestionnaire de périphérique de Windows : S'il ne l'est pas, il faut installer le driver correspondant, ou revenir à la version de 2014 qui fonctionne mieux sous Windows 11. Voici un forum qui en parle : https://forum.arduino.cc/t/windows-11-arduino-ide-version-2-1-1-com-port-problem/1148176/3 Les drivers sont disponibles ici : https://learn.sparkfun.com/tutorials/how-to-install-ch340-drivers/all#drivers-if-you-need-them Si tout est OK de ce côté, il suffit, dans NINA, de sélectionner Alnitak Flat Panel dans la liste : Puis de le paramétrer avec le port COM correspondant à celui indiqué dans le gestionnaire de périphérique : Cela devrait fonctionner normalement Bonne soirée, Sébastien

-
Pareil ici, l'abri est automatisé et ça fonctionne plutôt pas mal. Je viens de faire une toute petite correction dans le firmware pour que la connexion reste suffisamment stable. ASCOM c'est pas fou comme protocol au final... Capture_video_du_09-12-2023_131124.webm FlipflatProtoThread4Nina.ino
-
Bonsoir, La version précédente n'était pas très stable non plus, du fait de l'utilisation de fonctions synchrones (delay). Je viens de revoir tout le code pour le passer en protothreads, qui permettent de désynchroniser les échanges avec NINA sur le port série, et l'envoi de commandes au moteur servo. Bref, après pas mal de recherches et de mise au point, c'est beaucoup plus stable et tout à l'air de fonctionner correctement. Have fun ! Seb FlipflatProtoThread4Nina.ino