
Hypel
-
Compteur de contenus
11 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par Hypel
-
Alors est ce que c'est pour ce matin?
-
J'avais une question. Pour la calibration. Comment vous faite pour choisir l'étoile de calibration? Est ce que vous pointez l'élément à photographier et ensuite vous descendez la déclinaison sous ls 20° pour lancer la calibration ou il y a une autre méthode?
-
merci bcp. Ce sera pas pour ce soir ciel trop couvert mais des que possible j'essaye ca.
-
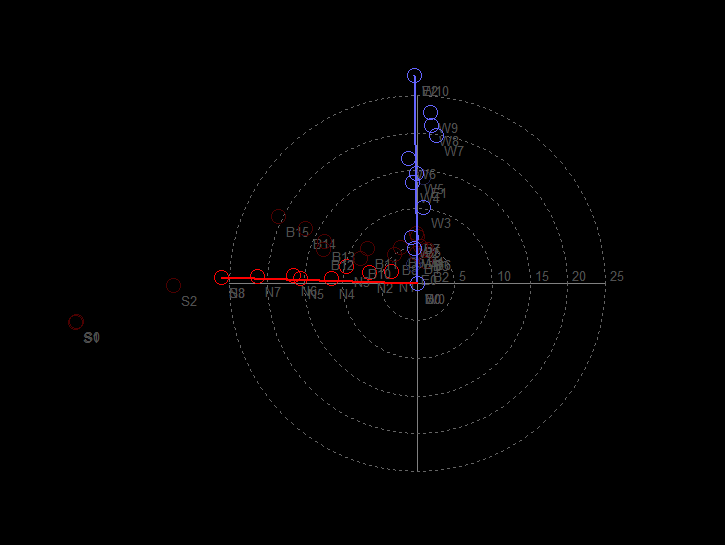
Bonjour à tous Cet anéée le Père noel m'a déposé un OAG et une camera de guidage pour améiorer mos setup d'astrophoto : Monture EQ35 Newton skywatcher 150/750 PDS Camera ARES C pro (IMX533) de player one Roue à filtre phoenix de player one (filtre UR/IR cut, L-pro, L extrem) Correcteur de coma skywatcher x0.9 OAG mini de player one camera sedna-m (imx178) pour le guidage Je pilote le tout avec un mini PC sous nina ou avec un pc portable sous sharpcap pour la VA. J'ai donc essayé hier de mettre en route l'autoguidage. J'ai fait une MES en utilisant polar align de sharpcap J'ai fait la map du chemin optique principal puis la map de la camera de guidage j'ai pointé ensuite sur Dubhe de la grande ourse qui était assez basse et pas cachée par les nuages (AD 11h et dec 61°). J'ai lancé PHD2 et fait les darks Puis j'ai lancé une calibration dont voici le résutat : Dec en rouge et RA en bleu J'ai ensuite laissé le systeme faire un suivi pendant 1h20 et j'ai obtenu ces résultats: Pour toute la session Zoom sur une partie pour voir les impulsions enoyées par PHD2 Voici l'analyse en term de drift Et l'analyze frequentielle : Le pic le plus important se situe à 481s soit environ 8 minutes qui correpond à un tour complet du grand pignon si je ne m'abuse. Par contre le pic plus petit à 237s je ne sais pas à quoi il correspond. J'ai enfin désactivé le guidage pour comparer et j'ai obtenu cela (malheuresement que sur 15 minutes car le PC a pris un coup de froid et s'est éteint.... : Je pense qu'avec une periode plus longue j'aurai fini par retrouver les meems pics de frequences. La configuration de PHD2 était celle la : Guiding Begins at 2026-01-02 19:34:26 Equipment Profile = test Dither = both axes, Dither scale = 1.000, Image noise reduction = none, Guide-frame time lapse = 0, Server enabled Pixel scale = 0.73 arc-sec/px, Binning = 1, Focal length = 675 mm Search region = 15 px, Star mass tolerance disabled, Multi-star mode, list size = 12 Camera = Sedna-M [SEDNA-M] (ASCOM), full size = 3096 x 2078, have dark, dark dur = 2000, no defect map, pixel size = 2.4 um Exposure = 2000 ms Mount = GSServer (ASCOM), connected, guiding enabled, xAngle = 91.1, xRate = 5.531, yAngle = -1.8, yRate = 6.528, parity = +/+ Norm rates RA = 8.6"/s @ dec 0, Dec = 4.8"/s; ortho.err. = 2.9 deg X guide algorithm = Hysteresis, Hysteresis = 0.100, Aggression = 0.700, Minimum move = 0.363 Y guide algorithm = Resist Switch, Minimum move = 0.363 Aggression = 100% FastSwitch = enabled Backlash comp = disabled, pulse = 20 ms Max RA duration = 2500, Max DEC duration = 2500, DEC guide mode = Auto RA Guide Speed = 7.5 a-s/s, Dec Guide Speed = 7.5 a-s/s, Cal Dec = 61.8, Last Cal Issue = None, Timestamp = 02/01/2026 19:34:26 RA = 11.06 hr, Dec = 61.8 deg, Hour angle = -9.68 hr, Pier side = West, Rotator pos = N/A, Alt = 24.4 deg, Az = 17.2 deg Lock position = 812.283, 203.434, Star position = 812.283, 203.434, HFD = 6.67 px Au final on voit bien qu'on améliore bcp les chose mais je m'attendais à pouvoir m'approcher un peu plus des 1" RMS. Avez vous des conseils et des tests à faire pour essayer d'amèliorer mes performances? En particuliers sur les parametres de config de phd2? Merci pour votre aide et désolé pour le pavé.

-
Bonjour Cela fait quelque mois que je me suis lancé dans l'astronomie, en visuel puis en visuel assisté et finalement en astrophoto. Pour ce dernier sujet j'aimerai améliorer mes temps de capture en incluant du guidage car pour l'instant le maximum que j'ai utilisé c'est la minute mais le résultat n'était pas fameux. Mon matériel actuel : Monture EQM35 pro pilotée avec sharpcap sur PC (majoritairement) ou nina sur mini PC mele (je débute seulement avec ce logiciel) Newton skywatcher 150/750 PDS correcteur de coma skywatcher SW0184 roue à filtre ZWO (5*1.25 avec un optolong L-pro et un optolong L-extreme à terme j'aimerai ajouté un L-Synergy)) Camera player one ARES C pro (imx533) Ma chaine optique actuelle est correcteur de coma (BF 55mm) + bague 17.5mm (M48F-M42M) + roue a filtre ZWO (20mm) + camera (BF 17.5mm) Mon idée est d'ajouter un OAG à la place de la bague 17.5mm. Comme j'ai un capteur APS-C je me disais qu'un simple oag ZWO (https://www.pierro-astro.com/materiel-astronomique/autoguidage/diviseur-optique-oag-zwo_detail) pouvait suffire. Voir ajouter un focuseur helicoidal (https://www.pierro-astro.com/materiel-astronomique/accessoires/accessoires-non-optiques/accessoires-t2/porte-oculaires-31,75mm-avec-mise-au-point-hélicoïdale-pour-filetage-t2-zwo_detail). Pensez vous que c'est un bon choix? Pour la caméra je pensais prendre une zwo120M mais j'ai vu que la taille des pixels est de 3.75u alors que ma cam principale à des pixels de 3.76u. Même focale et même taille de pixel ca nous donne un échantillonnage identique entre imageur et guidage Cela ne pose t il pas problème? merci pour votre aide
-

Phénomène bizarre sur un etoile brillante
Hypel a répondu à un sujet de Hypel dans Support débutants
Non il s'agit d'Alkaïd de la grande ourse. Donc pour moi ce n'est pas une double. -
Phénomène bizarre sur un etoile brillante
Hypel a répondu à un sujet de Hypel dans Support débutants
Merci pour l'info. Je n'avais pas pensé à ca sur le coup. Si les nuages le permettent ce soir je vais refaire un petit essai pour confirmer ca. -
Bonjour à tous Je démarre dans le monde de l'astronomie et du Lucky imaging sous sharpcap. Hier soir j'ai démarré une session. -Une bonne mise en station -Un coup d’alignement polaire avec sharpcap Et hop c’est parti pour une tentative de pointage sur M8 avec plate solving et la bonheur me voila avec la galaxie à peu près au centre de mon écran. Je lance un premier stacking, je touche un peu au temps d’exposition et au gain (finalement 10s et 450) aux histogrammes et la c’est la joie de la première visualisation. Alors c’est moche c’est sur mais pour une première c’est vraiment un sentiment génial. Du coup je me dis comme je suis à côté je tente M82 et la c’est pareil j’arrive à voir quelque chose. Tant qu’on y est je me dis tentons un petit M3 pour voir autre chose qu’une galaxie et c’est parti… Encore une fois sharpcap m’amène exactement ou je veux et j’arrive à voir quelque chose en direct. Tout se passe bien et la je décide d’aller voir une étoile brillante (comme j’ai tenté de faire ma collimation dimanche je vais la vérifier) et la c’est le drame un gros point noir au milieu de l’étoile… j’ai beau jouer sur la map le point noir diminue puis regrossi mais la photo montre le meilleur résultat que j’ai réussi à avoir. Je me dis que c’est le secondaire que je vois et que ca doit être un pb de mise au point , du coup je sors mon masque de Bathinov et je vérifie. Le dessin à l’air d’être symétrique du coup je ne comprends pas. Il est déjà 0h30 faut aller bosser dans quelques heures. Je laisse tomber et je viens vers vous aujourd'hui pour un peu d’aide pour comprendre ce phénomène. Merci Mon matos: Newton 150/750 Monture eqm35 Camera player one ares c pro (imx533)
-
Ah oui pour le modèle du 150 c'est le modèle 150/750 pds. Le matériel est de 2020. La personne s'en sépare par faute de temps entre son boulot et son autre passion pour la musique
-
Merci pour vos réponses. Mon but final est le visuel assisté mais je voudrai t aller par étape. -Approfondir ma connaissance du ciel ( pour l'instant uniquement à l'œil et jumelles) -Apprentissage de la manipulation des montures et du telescope. - 1er essais en visuel assisté avec smartphone (j'ai écouter récemment l'appli deepsky camera pro qui est al mal pour ca) -migrer ensuite vers un setup plus avancé en VA.
-
Bonjour j'ai l'opportunité d'acheter d'occasion un ensemble avec -une monture Skywatcher EQM35 - un tube Newton Skywatcher 150/750 - un tube Maksutov Skywatcher 150/1800 -une batterie Celestron Powertank - 3 oculaires Celestron XCel LX 12, 7 et 5mm - 1 Barlow ×3 Celestron XCel LX -2 housses de transport Pour 1300 euros. Je pensais m'acheter à la base le 150/750 sur heq5 en neuf mais cette opportunité me paraît très intéressante Je que la monture est moins bien mais je pourrai toujours la revendre pour monter en gamme plus tard. Ah oui info importante je suis debutant et ce sera mon 1er telescope. Le but étant de m'orienter sur du Visuel assisté. Qu'en pensez vous? Désolé mon doigt à ripper pour le titre j voulais dire pour 1er achat d'occasion




_00001.png.0218e149ca74d82dd7065876ab3281fd.png)
_00002.png.7e5b951b643d9c02b0a98e55967997ed.png)
