
Aperçu
À propos de ce club
Bienvenue au club astronomie avec Arduino
ici on se partage nos expériences, nos inventions, nos réparations en électronique avec Arduino
- Quoi de neuf dans ce club
-

Driver ASCOM avec arduino nouvelle version!!
Antiath a répondu à un sujet de astrolivier dans Discussions de astronomie avec arduino
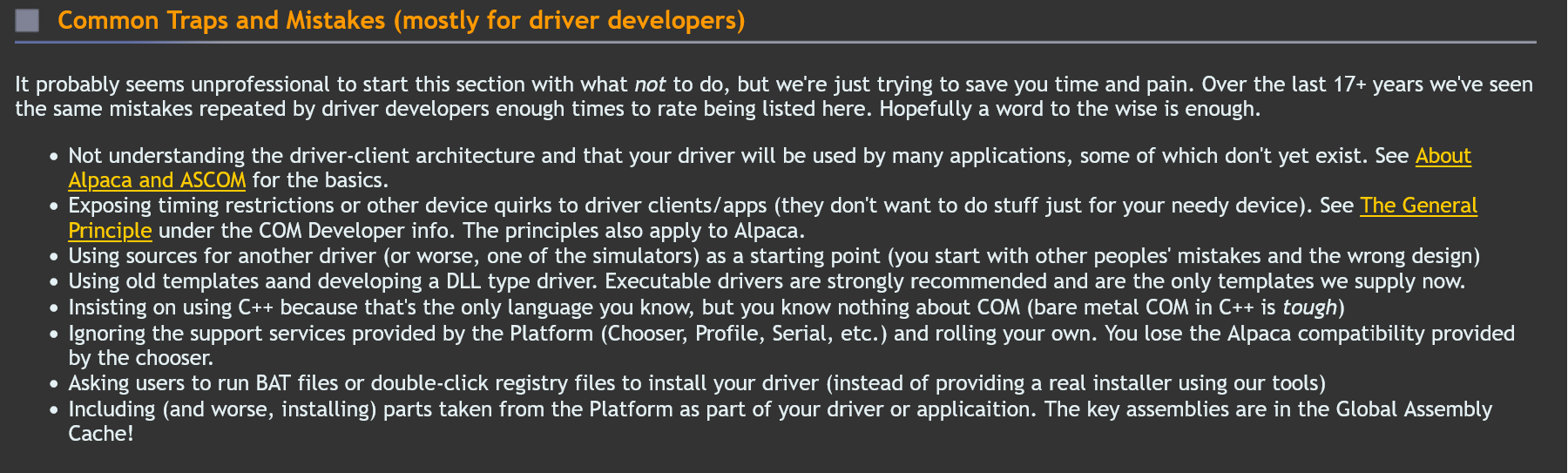
Je partge tes frustrations ouai... Je crois que ce qui m'énerve le plus c'est cet encart sur leur stie : En particulier le point où on te dit de ne surtout pas réutiliser du code existant. Comme si tout le monde savait exactement quoi écrire rien qu'en lisant leur doc, certes extensive, mais obscure et totalement dépourvue d'exemple concret et de snippet de code. Ouai ben...je vais me gêner hein.
-

Driver ASCOM avec arduino nouvelle version!!
Raphael_OD a répondu à un sujet de astrolivier dans Discussions de astronomie avec arduino
bah c'est fait ouai une pure aberration Moi j'ai failli buter l'équipe des dev ASCOM au bout de 2 heures jusqu’à la prochaine tête pensante qui va arriver dans leur équipe qui va tout remettre à plat 😂 Merci de ton retour -
Driver ASCOM avec arduino nouvelle version!!
Antiath a répondu à un sujet de astrolivier dans Discussions de astronomie avec arduino
Haha, je suis aussi en train de développer un nouveau driver ASCOM en ce moment. Heureusement je suis habitué au C# ( et pas au C 😅, la distinction est importante) donc c'est moins douloureux mais ouai je n'ai pas particulièrement apprécié non plus les derniers changements effectués sur la chaine d'outils d'ASCOM depuis la version 7. Je n'ai pas de soucis en soi avec ALPACA, c'est très bien comme initiative parce qu'ils continuent de supporter le développement de drivers pour Windows. Par contre l'abandon des drivers DLL classiques pour ne supporter plus que les drivers à serveur local... Je trouve cela vraiment très mal avisé...ça rajoute de la friction supplémentaire au développement de petits drivers simples qui n'ont pas besoin des fonctionnalités d'un serveur local. Bref. Je vois que tu as finalement résolu tes soucis mais je me permet quand même quelques conseils: 1) si ce n'est pas déjà fait, passe en .NET framework 4.8 minimum. 2) pour débugger le driver, normalement avec un driver DLL tu devais dire au débuggeur quel executable lancer, typiquement tu ajoutais un client ASCOM à la solution pour ça et comme ça tu pouvais mettre des breakpoint dans ton driver. Pour le serveur local c'est un peu différent, tu n'as pas besoin de rajouter de client dans la solution. Le serveur/driver lui même est l'exécutable que le débuggeur pointera. Donc après avoir build la solution, et fait cette petite étape dand cmd.exe pour enregistrer le driver ( ...m'énerve aussi ce truc), tu lances l'execution dans Visual studio en pointant le projet du driver, il executera le serveur local et après celà tu ouvres à part, en dehors de Visual studio, n'importe quel client que ce soit NINA ou autre. et tu lui demandes d'ouvrir ton driver. Tes breakpoint fonctionneront sans problème. C'est finalement assez simple mais j'ai quand même buté là dessus pendant quelques heures. 3) Ils le précisent bien dans le readme mais je vais le répéter quand même : le seul fichier qu'il est réellement nécessaire de modifier c'est SwitchHardware.cs. Ton driver il est là dedans et sa structure est essentiellement la même que les drivers DLL classique. Le reste, à moins que tu ais besoin d'autre chose qu'un port série (qui est déjà implémenté dans Sharedressources), pas la peine d'y toucher. Donc au final une fois qu'on sait où on doit mettre notre code et comment débugger, c'est pas beaucoup plus difficile qu'avant. -
Driver ASCOM avec arduino nouvelle version!!
Raphael_OD a répondu à un sujet de astrolivier dans Discussions de astronomie avec arduino
Bon un peu de progression : je post ici ça peut servir Ayant crée mon ASCOM Plateforme 7 Driver exe based singleton (ex Observing Conditions) J'ai fait les vérifications d'usage du ReadMe : cliquez droit sur le nom du driver dans l'explorateur puis propriétés - Veillez a ce que les Options de la rubrique Build soient bien en AnyCPU et X86 , le serveur est selon le Readme capable de switcher dans le bon mode. - Dans la rubrique applications vérifier le nom de l'assembly et l'espace de nom (par défaut tout est correct normalement) - Faire une génération du projet sans erreur sous VS2022 sans l'executer. - Se rendre dans le dossier de sauvegarde du projet sous WINDOWS puis dans ../bin/Debug localiser l'EXE du projet ASCOM.XXXX.exe - Ouvrir une fenêtre CMD ligne de commande en temps qu'administrateur : puis taper sous /Debug ASCOM.XXXX.exe /regserver ce qui permet une fois et une seule sur un PC d’enregistrer votre serveur facile non ! 😒 On ouvre ensuite soit une application cliente ASCOM (NINA) soit ASCOM Diagnostics et miracle on peut voir son driver. Exemple ci dessous d'un driver "blanc" Observing Conditions Confirmation en connectant les deux applications : NINA et ASCOM Diagnostics deux connections concurrentes sont possibles en même temps.
-
Driver ASCOM avec arduino nouvelle version!!
Raphael_OD a répondu à un sujet de astrolivier dans Discussions de astronomie avec arduino
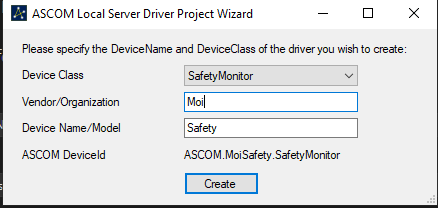
Hello @astrolivier@Antiath Perso je viens de me taper tout le site ASCOM je vois beaucoup de changement depuis 2021 ce qui m'oblige à passer en C après avoir fait un driver SQM Observing Condition et switch sous VB rapidement et fonctionnels. Bref je ne vais pas causer de la philo des dev ASCOM avec qui on fait table rase du VB demerdez vous avec Alpaca ou l'implantation d'un serveur en C : etc ... nous on s'en fout bref je migre !!! Ce que je cite ci dessus ne fonctionne pas sous VB2022 et les 3 templates C# ASCOM fraichement installés de mon coté. Je crée bien un ASCOM Plateforme 7 Driver exe based singleton (ex Safety Monitor) Je défini le nom l'emplacement etc ... puis ça correctement Le projet est bien crée avec son arborescence. J'attache ensuite une ASCOM Form au Driver. Et bien je me retrouve en ayant défini Ma Form ASCOM comme fichier de démarrage avec une erreur NET.Framework 4.0 introuvable ! cette version est obsolète...depuis pas mal de temps Ma question @astrolivier comment utilises tu les templates 2019 ? J'ai l'erreur de Framework bien sur je ne peux pas tester avec NINA Venant de VB et python et Tcl/Tk grande est ma déception de me taper du C abandonné depuis les études Mes drivers VB fonctionnent bien mais pour les montées en version ça va pas le faire. Merci de votre aide si vous passez par là pendant les vacances en attendant je prends la pelle je creuse .
-
comme promis , je reviens vers vous pour donner l'avancement du projet . a force d'insister et de lire sur le net , j'ai reussi a compiler et televerser le programme et ça fonctionne . je vais juste reprendre quelques lignes en fonction du moteur que j'utiliserais . merci a tous pour votre aides .
-
En effet , j'ai confondus avec un autre projet . Pour le moment je laisse la programmation en stand bye pour me consacrer à la lecture du projet du lien que vous m'avez envoyé et dès que je me relance dedans je reviens ici pour tenir tous ceux qui m'ont aidé au courant de l'évolution du projet . Merci à tous et à très bientôt j'espère
-
Bonjour @houme16, C'est presque certain que non. Vous nous avez dit avoir téléchargé votre projet sur Github, celui que je vous propose est sur Sourceforge. D'ailleurs en comparant les lignes 9 à 26 de chacun des codes (vous nous avez mis cet extrait dans votre premier message), il est facile de s'apercevoir qu'ils n'ont rien en commun. Je vous propose de faire place nette du premier projet, et de repartir à zéro sur celui de Sourceforge qui est un modèle de présentation et de suivi de projet. Tout y est décrit par le menu : le plan, les composants, le driver ASCOM, le pilotage de l'écran de visualisation des paramètres, un manuel de plus de 200 pages, une section FAQ etc. Il y a même une vidéo explicative du code. En lisant différents codes du projet, le créateur a même rendu son interface multilingue, Anglais, Chinois, Tchèque, Français etc. Suivez très très scrupuleusement la mise en œuvre, en ne passant pas à une étape suivante sans avoir pleinement compris celle sur laquelle vous êtes (sinon c'est échec quasi-assuré), et vous devriez in fine avoir un des tout meilleurs Focuser DIY disponibles à ce jour. Bon courage. Ney
-
Je crois que c'est celui que j'utilise car en fait j'ai déjà un focuser mais je voulais quelque chose de plus pointu pour la mise au point pour la photo
-
Bonjour @houme16, Bienvenue dans le monde merveilleux du développement en C ou C++. Cette erreur provient d'une classe qui appartient à la Library (Bibliothèque en français mais abusivement appelée Librairie en informatique en français) AFMotor.h que vous utilisiez sous une de ses variétés, myAFMotor.h, mais n'est peut-être plus présente dans votre nouvelle Library ou alors sous un autre nom. Donc lorsque le compilateur cherche à faire ses liens, ne trouvant cette classe, il déclare forfait. Or nous avons vu que cette Library est obsolète, elle est remplacée par celle que vous utilisez maintenant, Adafruit_MotorShield.h. Voici un lien qui vous aidera à bien installer vos Libraries : https://learn.adafruit.com/arduino-tips-tricks-and-techniques/arduino-libraries Une Library est composée de classes d'objets comme AF_Stepper. Si AF_Stepper est bien une classe de AFMotor.h, vérifiez bien que c'est la même classe dans la nouvelle Library que vous utilisez, sinon rechercher quel est le nom de cette classe dans votre nouvelle Library. Ça c'est la démarche pour faire fonctionner ce que vous avez choisi. Peut-être suis-je dans l'erreur, mais je pense que vous avez téléchargé une code tout fait mais aussi très ancien pour piloter votre focuser. D'où la présence de la Library AFMotor.h . Vous avez installé une Library plus récente pour correspondre aux modules Arduino actuels, aussi soit vous devez reprendre tout le code, soit vous devez trouver un code lui aussi plus récent. Sincèrement, comme vous débutez, c'est cette dernière solution que je vous propose. Voici un lien vers un Focuser DIY qui fonctionne bien et est très régulièrement tenu à jour : https://sourceforge.net/projects/arduinoascomfocuserpro2diy/ Un dernier point, en informatique, et tout particulièrement en développement, la langue anglaise fait partie des "basics", sinon vous avez ici une plateforme en français pour aider au démarrage : https://www.arduino-france.com/tutoriels/ide-arduino-installation-et-utilisation/ Bon courage et persévérez, ça finira par le faire. Ney
-
merci , c'est sympa et encourageant pour continuer . en effet , j' ai renommé les différentes librairies et sa fonctionne du moins je pense . nouveaux message d'erreur : expected type-specifier before 'AF_Stepper' mon anglais etant limité , je suis en phase de recherche pour comprendre . petite question .les message d'erreur s'effacent t ils ou restent ils ?
-
Mais non pas du tout ! Vous n'embêtez personne, et comme chacun ici l'a fait, vous débutez. C'est donc normal de tâtonner. Courage, vous allez y arriver. Quand quelque chose ne fonctionne, pensez à toujours lire les readme.txt qui accompagnent les téléchargements, ce sont en général des mines de renseignements de grande valeur. Ensuite un coup de moteur de recherche sur le net aide aussi beaucoup. Nous n'avions pas cela il y a 45 ans, tout se faisait avec le gros (très gros) livre sur les genoux et les 5 à 10 000 cartes perforées du programme en Fortran IV dans la caisse à côté. Mais là je vous parle d'un temps que les moins de ... heu 50 ans ? ne peuvent pas connaitre. Ney
-
Ha oui , je n'ai pas pensé à ça. Je suis désolé d'embêter tout le monde avec mon problème mais je suis vraiment nul sur ce genre de situation
-
Bonjour @houme16, Cette nouvelle Library en V2 est plus récente, c'est un plus. Avez-vous pensé à changer l'argument de #include dans votre code ? Votre nouvelle Library s'appelle "Adafruit_MotorShield.h" donc la ligne de code doit maintenant être #include Adafruit_MotorShield.h sinon vous aurez toujours le même code erreur à la compilation puisque la Library MyAFMotor.h n'existe pas. Ney
-
bonjour a tous . je viens de tout reprendre a zero avec nouveaux telechargement de tout rien y fait , j'ai toujours le meme message d'erreur . librairie prise ici : https://github.com/adafruit/Adafruit_Motor_Shield_V2_Library?tab=readme-ov-file
-
Ah d'accord, je n'avais pas vu ça. Demain je vais donc essayer les liens que tu as mis
-
Bonsoir @houme16, Votre souci est peut-être là ! Voici en effet ce qui est écrit dans le readme.txt qui accompagne cette Library : C'est ce que je vous signalais dès le premier message. Ney
-
Désolé pour le manque de précisions, je suis au boulot sur mon portable
-
Github. Com adafruit motor shield
-
Et qui est ? Ney
-
J'ai pris l'adresse https citée par l'ide
-
Bonjour @houme16, C'est toujours mieux de passer par les procédures d'installation, sinon on a vite fait d'oublier un lien, un chemin, ou autre. Il y a peut-être une piste à examiner concernant le nom. Quand on télécharge le ZIP et qu'on analyse le contenu, la Library est connue sous le nom AFMotor.h . Or @houme16 dans son déclaratif d'initialisation écrit "#include myAFMotor.h". Peut-être faut-il alors soit modifier le #include, soit renommer la Library. Si c'est cela, je votre pour la première solution. Le téléchargement de cette Library sur Github délivre un produit obsolète, c'est bien écrit dans readme.txt. Quelle a été votre source de téléchargement ? Ney
-
Pas de soucis je vous tiens au courant de l'évolution de la situation
-
ça marche donnes nous des nouvelles quand tu auras fait ça cdt
-
Alors par acquis de conscience, je vais tout supprimer, aussi bien ide arduino et tous les téléchargements lié à my focuser pro 2 et tout reprendre à 0 demain matin car je suis au boulot actuellement. Si ça fonctionne toujours pas demain , je ne sais comment je vais faire .

.thumb.jpg.57a7c4d86d7e3afe75bdd66a40b8410a.jpg)
