
Gandalf
-
Compteur de contenus
1049 -
Inscription
-
Dernière visite
-
Jours gagnés
1
Messages posté(e)s par Gandalf
-
-
Bel observatoire !
J'ai monté le mien en quatre jours mais en bois et plus petit seulement 2X2m qui avec le trépied géant Meade à la place de la colonne béton se révèlent un peu juste

Le cadre métallique du toit à été fait en deux jours hors peinture.
En 2007 , depuis le bardage du toit a été remplacé par de l'onduline bitumée .



Mais pour revenir au sujet , isoler c'est bien , ventiler c'est mieux et si on peu faire les deux...
J'ai une colonne béton avec un sous-bassement de 1mx1mx0.5m isolé du du sol de l'abri.
Pour les problèmes de condensation, je pense qu'une aération sur un point haut avec une entrée d'air basse, fait l'affaire.
L'avantage l'isolation est de limiter les zones froides sujettes à la condensation.
L'isolation par l'extérieur permet de bénéficier de l'inertie du parpaing et de bien moyenner la température.
JL
-
-
Perso j'ai isolé les murs par l'extérieur et le toit c'est de la tôle sandwich imitation tuile(Tôle-isolant-tôle).
Le toit a une pente et la partie la plus haute n'est pas fermée hermétiquement. Un courant d'air naturelle naturelle s’établit entre la partie basse et la partie haute, évitant les problèmes de condensation.
J'ai toujours une température tempérée, qui accélère le refroidissement en été.
quelques photos:
JL
-
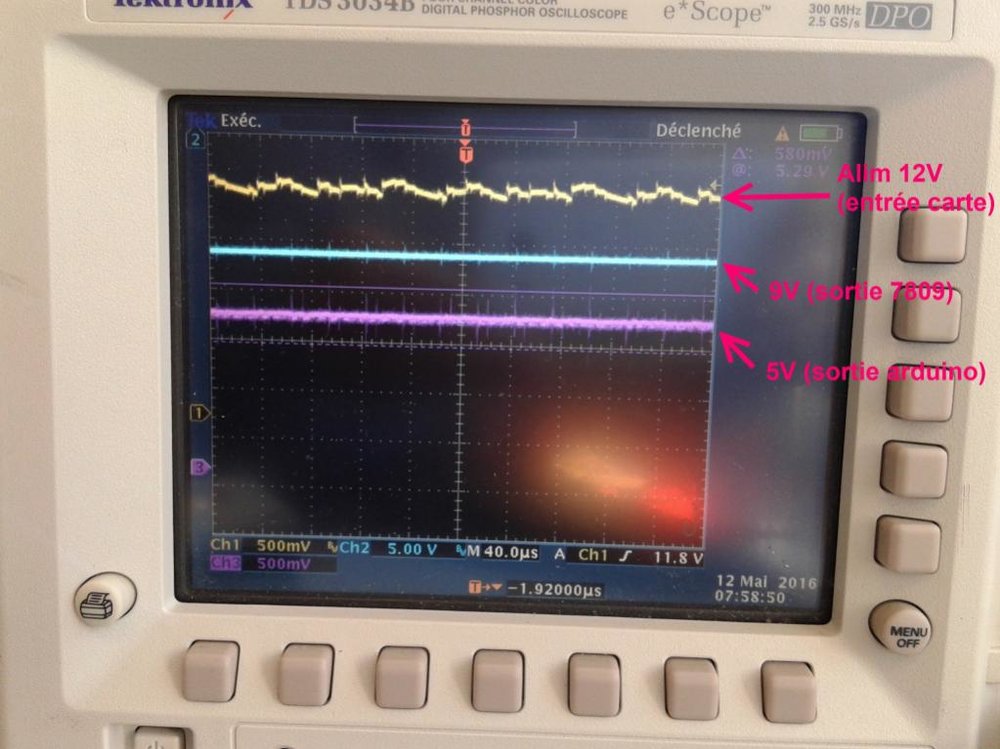
Sur le montage, l'arduino fabrique le 5V pour lui et les périphériques. Donc il doit pouvoir fournir le courant en conséquence.
Plus on augmente la tension en entrée moins il y a de courant de dispo en sortie. La tension admissible en entrée n'est pas le seul paramètre à prendre en compte. La capacité du composant à évacuer les calories doit-être considérée.
Le régulateur de l'arduino (CMS) peut dissiper une puissance P. P est constant
P = U x I
U est la différence de tension entre l'entrée de l'arduino et les 5V de sortie: U= Vin-5V
I est le courant consommé.
P = (Vin-5V) x I.
Si tu augmentes Vin tu dois diminuer I.
Quand j'ai conçu le schéma je voulais être certain d'avoir assez de courant dispo pour ne pas avoir de soucis pour toute évolution.
Vin variant suivant les utilisateurs: 12V avec un bloc alim régulé, 13.8V avec une batterie chargé, 15V éventuellement pour un utilisateur d'EQ8...
De plus ne maitrisant pas la qualité des alim utilisées, je préférais avoir un quelque chose de propre.
Enfin le surcout engendré doit s’élever à 4€.
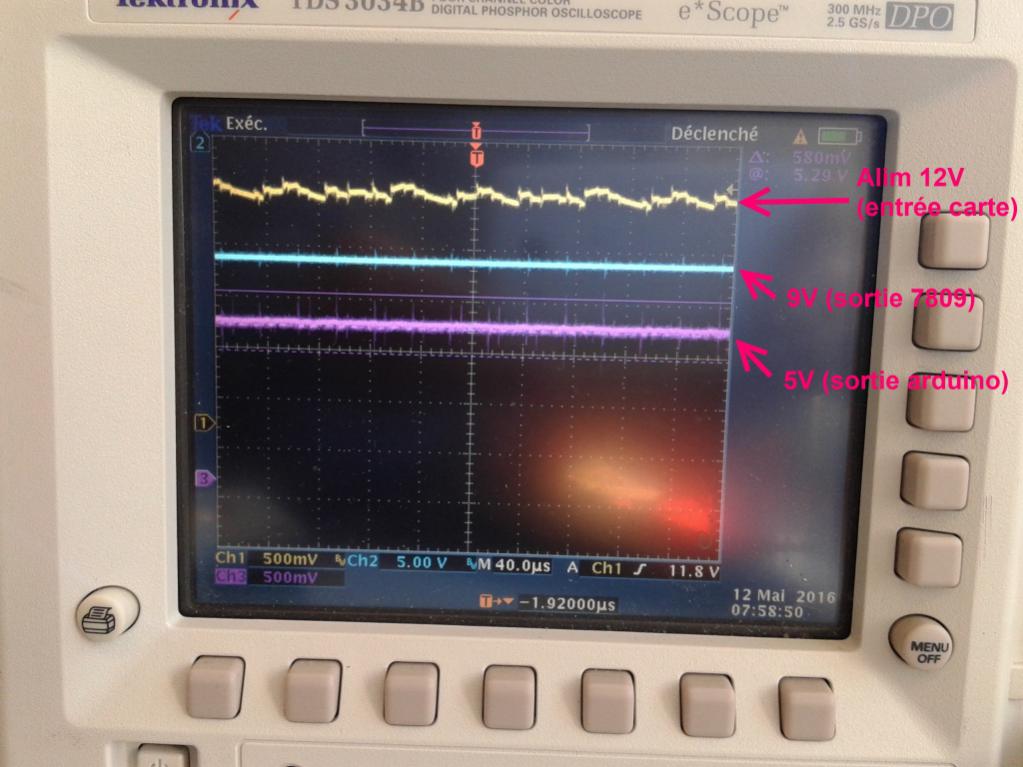
Pour illustrer mon propos, une photo du signal oscillo qui montre ce qui sort d'un bloc alim à découpage.
Si tu veux être sur la mailing list envoie moi un MP avec une adresse mail pour l'abonnement.
JL
-
J'ai en projet de le faire avec une vielle monture à fourche meade. Pas encore fait par manque de temps.
C'est la solution la plus simple, il faut juste connaitre les caractéristiques de la monture pour calculer la vitesse de rotation du moteur et donc sa fréquence d'horloge.
JL
-
Salut David.
Envois moi un mp avec une adresse mail pour t'inscrire et envoyer la doc et les fichiers.
J
-
Salut Hoxa,
Le soft sort du gerber ou du pdf échelle 1.
Ercim prend du pdf.
Si tu m'as envoyé un mp je n'ai rien reçu.
JL
-
Bonjour Hoxa,
En ce qui me concerne je préfère réaliser un circuit imprimé. C'est plus fiable et une fois validé, reproductible à l'infini.
Je ne prend pas la tête avec le tirage-percage du circuit. Je passe par une petite société Toulousaine Ercim. J'en ai eu pour un peu moins de 15€ (film+tirage+percage+expédition) il prenne PayPal. Mais sur le net tu trouveras ton bonheur. ...je n'ai pas d'actions.
Si tu veux, envoie moi un mp, je t'inscrirai sur la liste privé. Il faut me fournir ton adresse mail dans ton mp.
jl
-
-
Le montage d'un kit Goto EQ5 sur une GPDX ne présente pas de difficulté majeur.
Mais il y a tout de même deux points un peu délicats.
- La fixation du moteur AD
- Le coffret du moteur AD qui est de guingois et qui a tendance à frotter sur le coffret du moteur DEC.
La fixation du moteur AD:
Quand on vis le moteur sur la monture (en tout cas sur la mienne), en serrant la vis j'avais le moteur qui avais tendance à se déplacer vers la roue dentée de la vis sans fin. A tel point que la rotation de cette dernière était de plus en plus dur au fur et à mesure du serrage.
J'ai résolu le problème en taraudant le bloc moteur en M4 (Cf photo) de tel sorte que les trous créés et le trou de fixation du bloc forme un triangle. J'y ai mis 2 vis sans tête qui servent de points d'appuis.
En réglant de combien dépasse les vis on ajuste le jeu entre les roues dentées du moteur et de la vis sans fin.

Le boitier:
En ce qui concerne le boitier, j'ai régler le problème grâce à l'impression 3D (Merci freecad). Le matériau utilisé est de l'alumide (mélange aluminium + plastique). Je l'ai paint pour éviter le surcout de la teinture dans la masse.
Il y à 3 pièces (Bloc AD, Bloc DEC, Support connecteurs) il faut compter environ 100€ chez scultpeo.
J'ai conçu un boitier pour le moteur AD:


Un boitier pour le moteur DEC:

Le tout assemblé (plus de problème de frottement
 ):
):
Si vous cassé un câble de connecteur:

D'autres photos ici: Photos Adaptation GPDX
JL
- La fixation du moteur AD
-
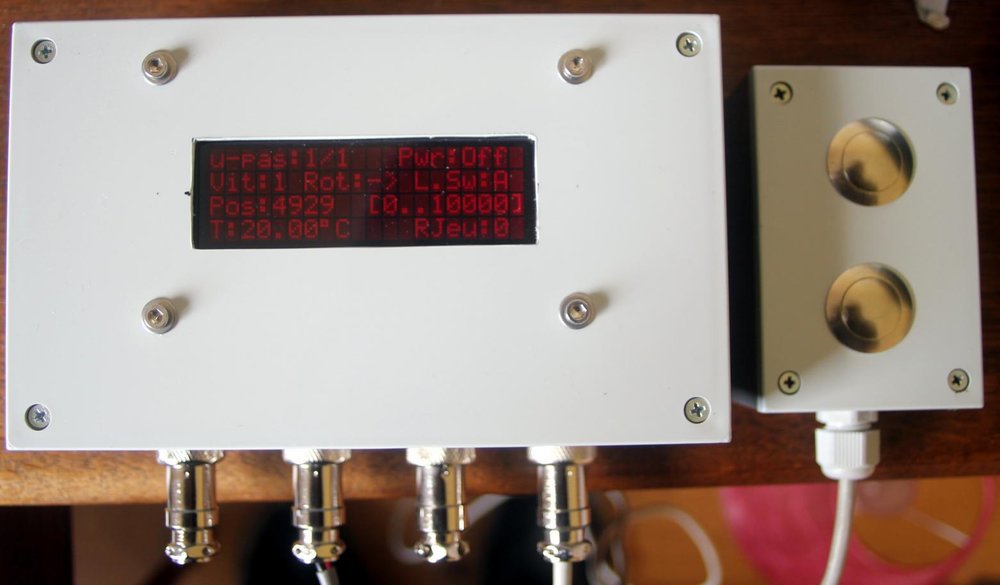
Le projet avance.
Une liste de diffusion privée a été créée.
Le CI final est opérationnel et le code évolue.
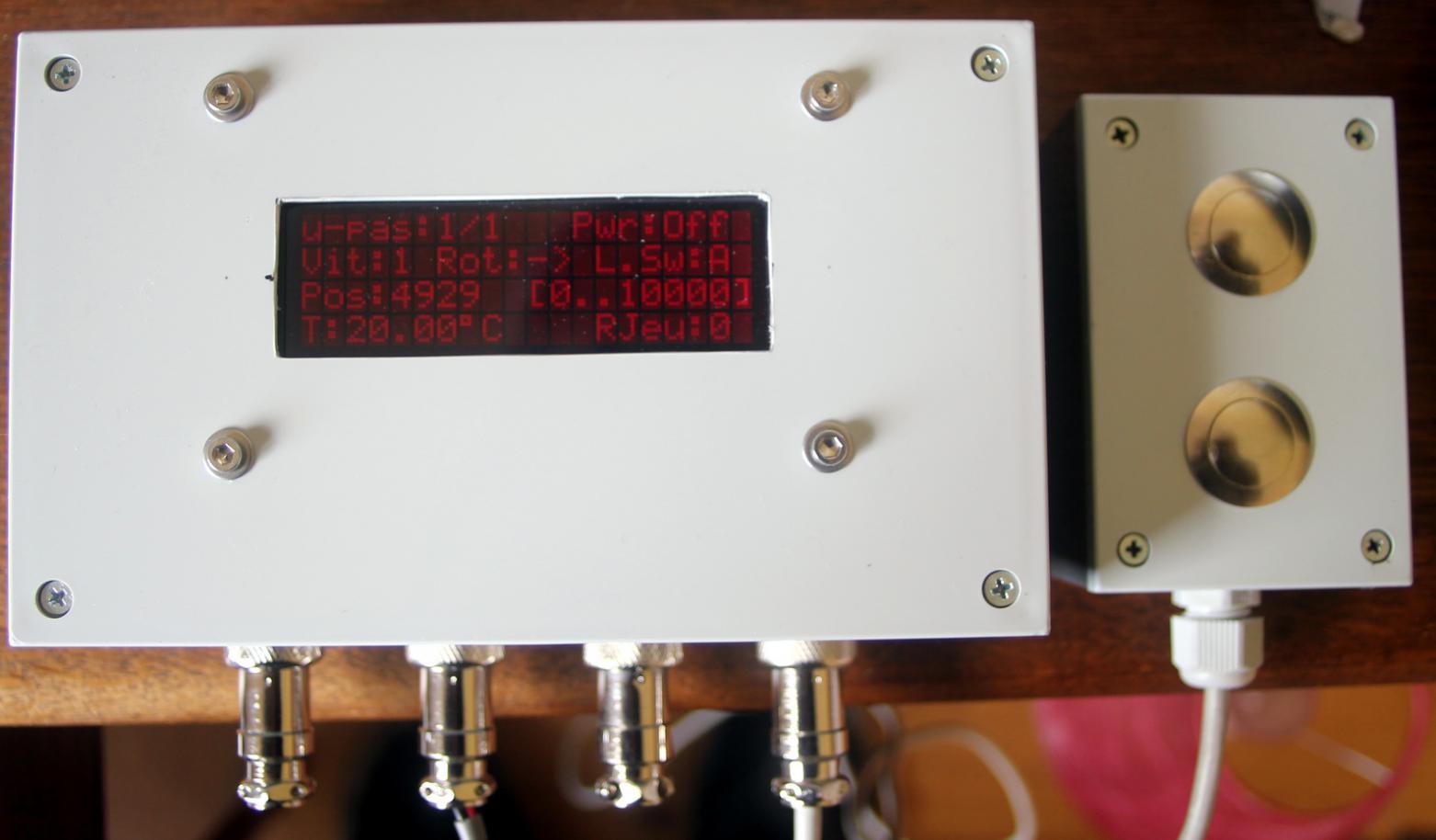
voici quelques photos:
JL

-
L'arduino possède un régulateur embarqué donc si on l'alimente en externe il faut utiliser une tension d'au moins 1.5V au dessus de 5V.
Le régulateur statique de l'arduino va dissiper d'autant plus que l'écart entre la tension d'alim et le 5V est important.
Au delà d'un certain écart je préfère abaisser la tension par une régulation externe. Précaution peut-être inutile...mais déformation professionnelle.
On peut panacher effectivement les alim: un 12V pour alimenter la partie puissance (moteur/driver) et l'arduino par l'USB. Si techniquement il n'y à pas de soucis, sur un plan utilisation ça condamne à utiliser son montage uniquement avec un PC. Donc on se prive de la possibilité de piloter son focuser en se passant du PC pour un usage autre que photo.
C'est dommage car utiliser le 12V moteur ne complique pas énormément les chose et ne fait pas grimper les couts.
JL
-
salut gandalf
je suis intéressé par ton code car j'ai construit la semaine dernière mon focuser et effectivement je trouve qu'il pourrait être sympa d'y apporter certaines modifications dont tu as parlé.
Je confirme que les schémas sont pas super clairs, j'ai cramé un Easydriver et un Nano en voulant rajouter les fameux boutons poussoirs. Au final je ne les ai pas mis tout comme le LCD ni la T°.
Focuser de base si on peut dire.
C'est pourquoi je ne réponds pas aux exigences de beta testeurs mais serais très intéressé d’améliorer mon petit système.
Merci
Donnes moi une adresse par MP, je t'envoie ce qu'il faut.
JL
-
Merci Eric pour la video.
Suite au problème de reconfiguration de la limite haute de fin de course quand on change les µ-pas, que tu m'as soumis. J'ai apporté les modifs suivantes:
- Quand on change le mode µ-pas, le programme modifie aussi la valeur de position courante et la limite haute de fin de course, et ce de manière proportionnelle. La limite de ce principe réside dans le fait qu'on travaille sur des entiers, donc si on effectue trop de changements successifs, l'accumulation des arrondi peut faire perdre en précision. Donc au bout d'un moment il vaut mieux refaire une calibration.
- Quand on règle, manuellement le menu "Position Minimum" (quand on fait le zéro), la limite haute de fin de course du moteur est automatiquement remise à sa valeur maximale.
- En calibration semi-automatique ou automatique, les limites sont automatiquement ré-initialisées.
Il faut juste que je récupère l'afficheur LCD pour valider les modifs.
JL
- Quand on change le mode µ-pas, le programme modifie aussi la valeur de position courante et la limite haute de fin de course, et ce de manière proportionnelle. La limite de ce principe réside dans le fait qu'on travaille sur des entiers, donc si on effectue trop de changements successifs, l'accumulation des arrondi peut faire perdre en précision. Donc au bout d'un moment il vaut mieux refaire une calibration.
-
GBS, AMED: pas de soucis.
Suite à une remarque de etmay53, je dois modifier un le programme.
Envoyez-moi un MP avec une adresse pour vous envoyer les fichiers.
JL
-
Merci de vos réponse.
Donc il vaut mieux l'Evostar version noir récente, même si elle n'est pas collimatable.
JL
-
Pour ceux qui ont eu l'occasion de regarder à travers.
Les anciennes SW bleu 150/1200 avec lentilles collimatables sont-elles comparables, au niveau qualité des lentilles, avec les nouvelles evostar 150/1200 noir non collimatables ?
JL
-
ok donc si je fais des sorties en parralelle, fusible sur chaque sortie ? quel amperage?
merci
...Ben tout dépends.
Pour la monture il faut regarder sa conso dans la doc et prendre une marge. Comme les moteurs créent un pic de conso au démarrage tu prends des fusibles temporisé. Exemple si elle est annoncée pour 2A tu peux mettre du 2.5A ou 3A. Ça dépend si tu privilégie l'intégrité du système ou la continuité de service.
Pour la sortie résistance chauffante, tu fait I(A)=P(W)/12V, un peut de marge et là pas besoin de fusibles temporisés.
Ainsi de suite...
JL
-
J'ai exactement la même, mais je l'utilise en fixe.
Vu le grand age de la mienne, j'ai changé les condos chimiques.
Tu n'auras pas de problème...enfin oui le poids, elle pèse un âne mort à cause de son gros transfo.
Par contre tu ne te prendras pas de bourres comme avec certaines alim à découpage qui n'aimes pas l'humidité.
Par contre fais attentions aux transistors à l'arrière de l'alim, leur boitier métallique n'est pas isolé, et c'est le collecteur du transistor. Donc absolument éviter la condensation dessus et le risque de CC avec la cage de l'alim relier à la terre.
J'ai tropicalisé les circuits imprimés de la mienne. A l'intérieur c'est vraiment de l'électronique à papa, donc simple.
J'hésite à lui mettre une série de connecteurs "avion" (comme celui de l'EQ8) et à associer un fusible à monter sur boitier à chacune des sortie.
JL
-
-
-
Bonjour Gandalf,
Tu vois quoi comme modèle de capteurs ? Tes sources sont-elles accessibles ?
Cordialement
Le capteur doit simplement renvoyer un 0V/5V donc un contacteur, un capteur optique devraient convenir ou un détecteur à effet hall (c'est celui que je vais tester) devrait aussi aller.

Concernant mon code source pas de pb, mais je n'ai pas encore une version stable.
JL.
-
Apparemment tu veux le protocole spécifique Robofocus.
Le problème, c'est que chacun y va de son protocole, rien n'est standard et rares sont les constructeurs qui le publie. La standardisation se fait par le driver ascom qui va passer d'un protocole standardisé à un protocole propriétaire.
Il te reste une solution, de l'espion de ligne. Tu trouvera un certains nombre d'outils ici:
http://www.logitheque.com/editeur/hhd-software_6706/
JL
-



La MAP des C11 et C14 par le secondaire
dans Matériel général
Posté
Ça faisait un moment que j'y pensais, par hasard hier je suis tombé dessus.
Ça n'est pas à proprement parlé une nouveauté, puisque ça existe depuis 2011, mais pas de traces sur WA.
Sur les SCT meade et celestron la MAP se fait par déplacement du miroir primaire avec les problèmes de shifting induits et la nécessité de toucher à la collimation si on veut quelque chose de nickel.
Bien sur vous me direz, il suffit de mettre un Crayford, oui mais ce dernier peut être problématique si on utilise un réducteur de focal.
De plus les SCT n'ont pas la même réponse optique, qualitativement parlant, en fonction de la position du primaire.
Alors Optec a conçu pour vous le SMFS (Secondary Mirror Focusing System), un moteur pilote la position du miroir secondaire.
Instructions ici.
Avantages:
Inconvénients:
JL