Cedric02700
-
Compteur de contenus
979 -
Inscription
-
Dernière visite
-
Jours gagnés
1
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par Cedric02700
-

Tuto boite à relais Ethernet. Cherche testeur.
Cedric02700 a répondu à un sujet de Cedric02700 dans Les bricoleurs
Salut. As tu essayé de brancher le méga en USB sur un PC avec le moniteur série connecté et faire un reset pour voir ce que ça dit? Le câble reseau doit être connecté. Désolé pour le retard, je n’avais pas vu le message. -
Premiers trébuchages avec mon APN
Cedric02700 a répondu à un sujet de Allegro dans Support débutants
Salut. Pour aprivoiser la mise au point de l'ensemble pas la peine d'attendre une belle nuit. Ca se fait très bien de jour sur un objet éloigné d'un kilomètre minimum. Ca te donne une distance de base de la postion de ton porte occulaire avant de fignoler ta mise au point. -
Telescope au jardin : Alimenter en 220 ~ ou en 12 continu ?
Cedric02700 a répondu à un sujet de frazap dans Les bricoleurs
Salut, avec une résistance de 7ohms au km pour un cable cuivre de 2.5mm2, je tombe sur le même résultat pour 7A. -
Tuto relais USB avec appli Windows
Cedric02700 a répondu à un sujet de Cedric02700 dans Les bricoleurs
Pas de soucis! -
Tuto relais USB avec appli Windows
Cedric02700 a répondu à un sujet de Cedric02700 dans Les bricoleurs
La carte que tu as mis en liens plus haut possède un petit soft de test qui permet de piloter les relais. Pour le driver ascom je dois pouvoir te faire ça. -
Tuto relais USB avec appli Windows
Cedric02700 a répondu à un sujet de Cedric02700 dans Les bricoleurs
Le probleme de l'automatisation c'est l'abscence de retour numerique des fins de course. Donc pas d'alerte en cas de defaillance. Si cette option n'est pas primordiale, il est possible de developer assez facilement un driver ascom basique pour gerer l'ouverture et la fermeture du poste fixe. -
Tuto relais USB avec appli Windows
Cedric02700 a répondu à un sujet de Cedric02700 dans Les bricoleurs
Niveau intensité ça passe. C'est juste pour du controle à distance? Pas d'automatisation envisagée? -
Tuto relais USB avec appli Windows
Cedric02700 a répondu à un sujet de Cedric02700 dans Les bricoleurs
Salut. Pourrai tu preciser ta question? Un liens vers la carte en question serait bien aussi. Si les relais sont assez costaud pour alimenter le moteur, oui il sera possible de piloter l'ouverture et la fermeture du poste fixe avec cette carte usb. Il faudra cepandant gerer les fins de courses sur la partie puissance de l'installation -
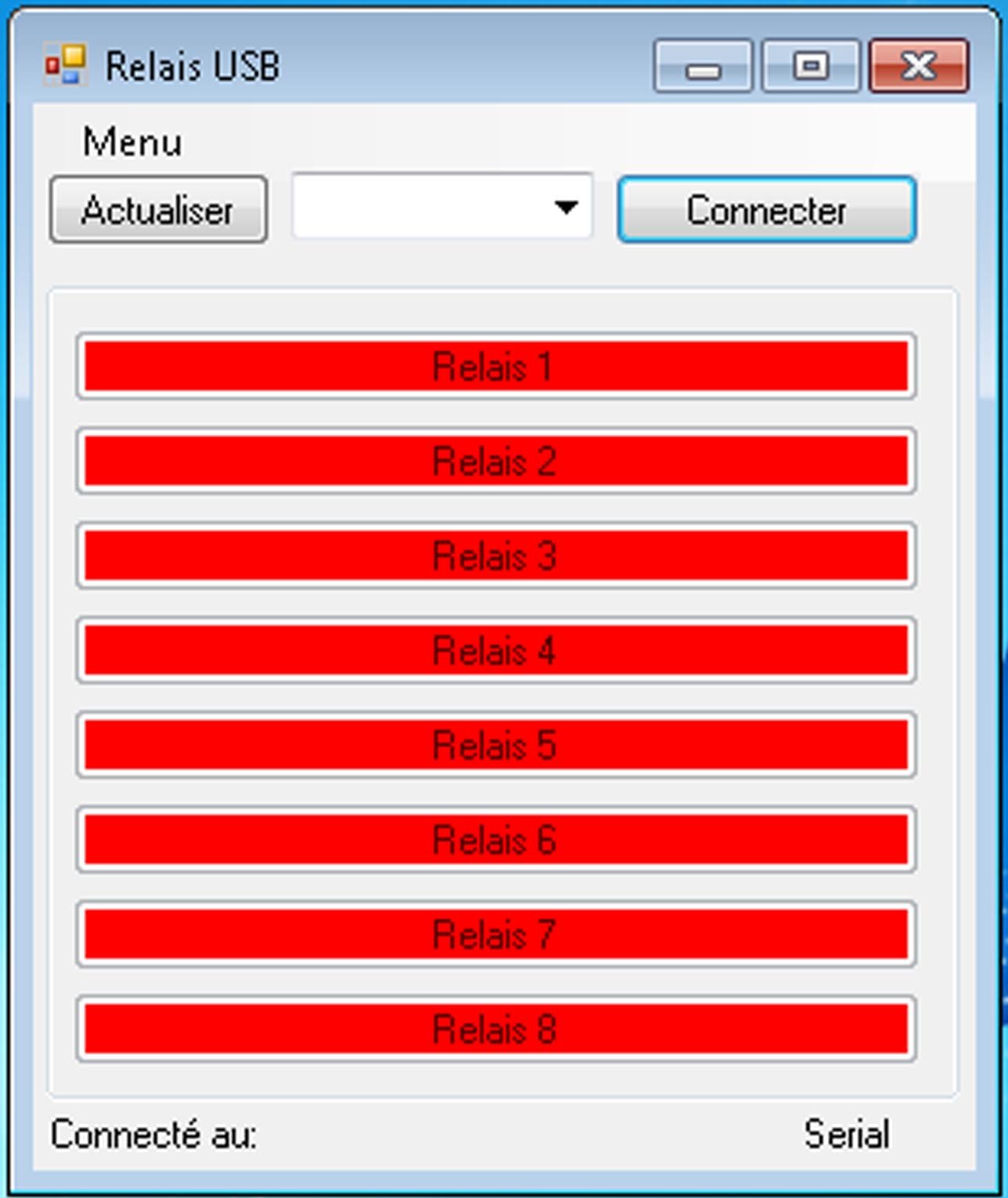
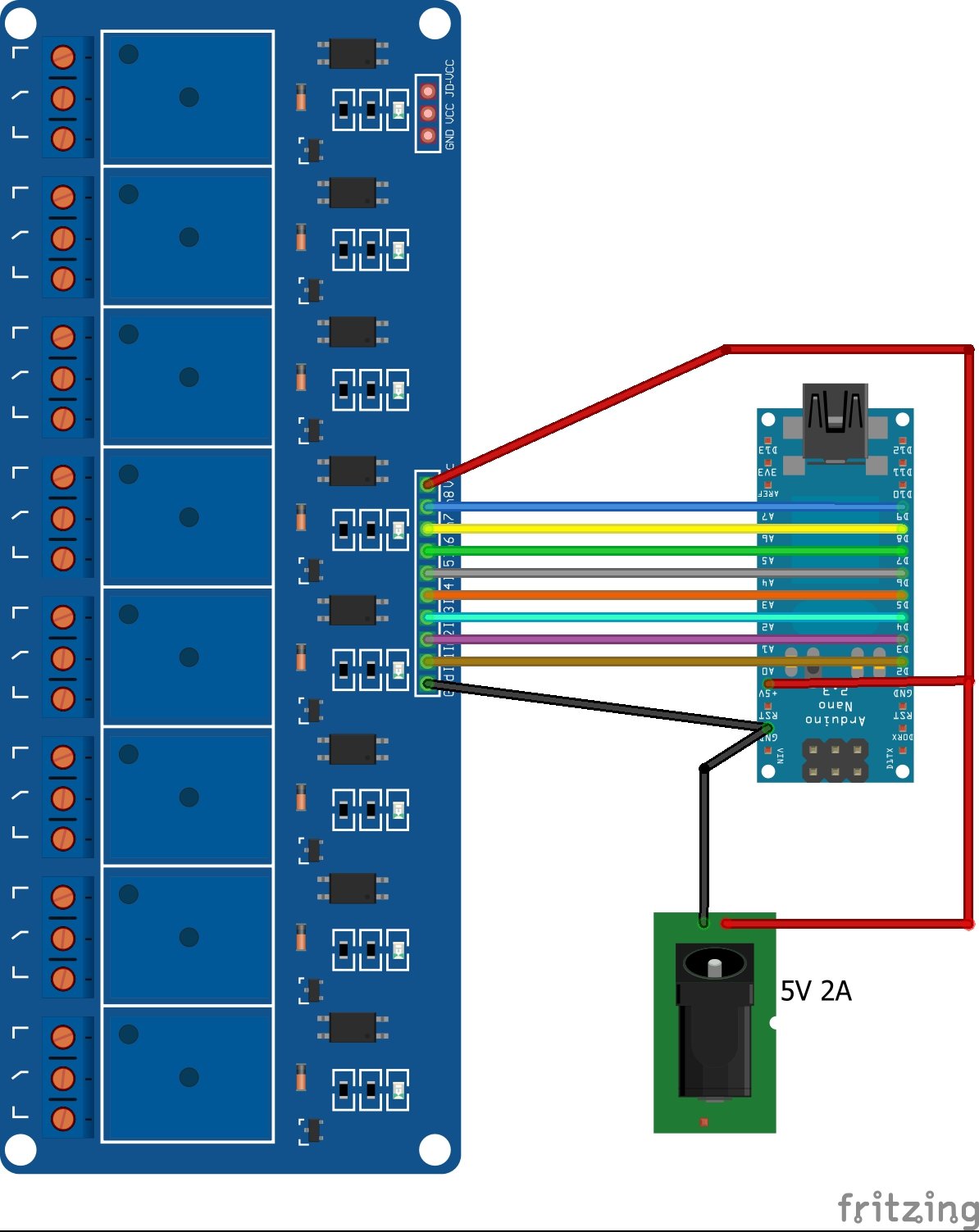
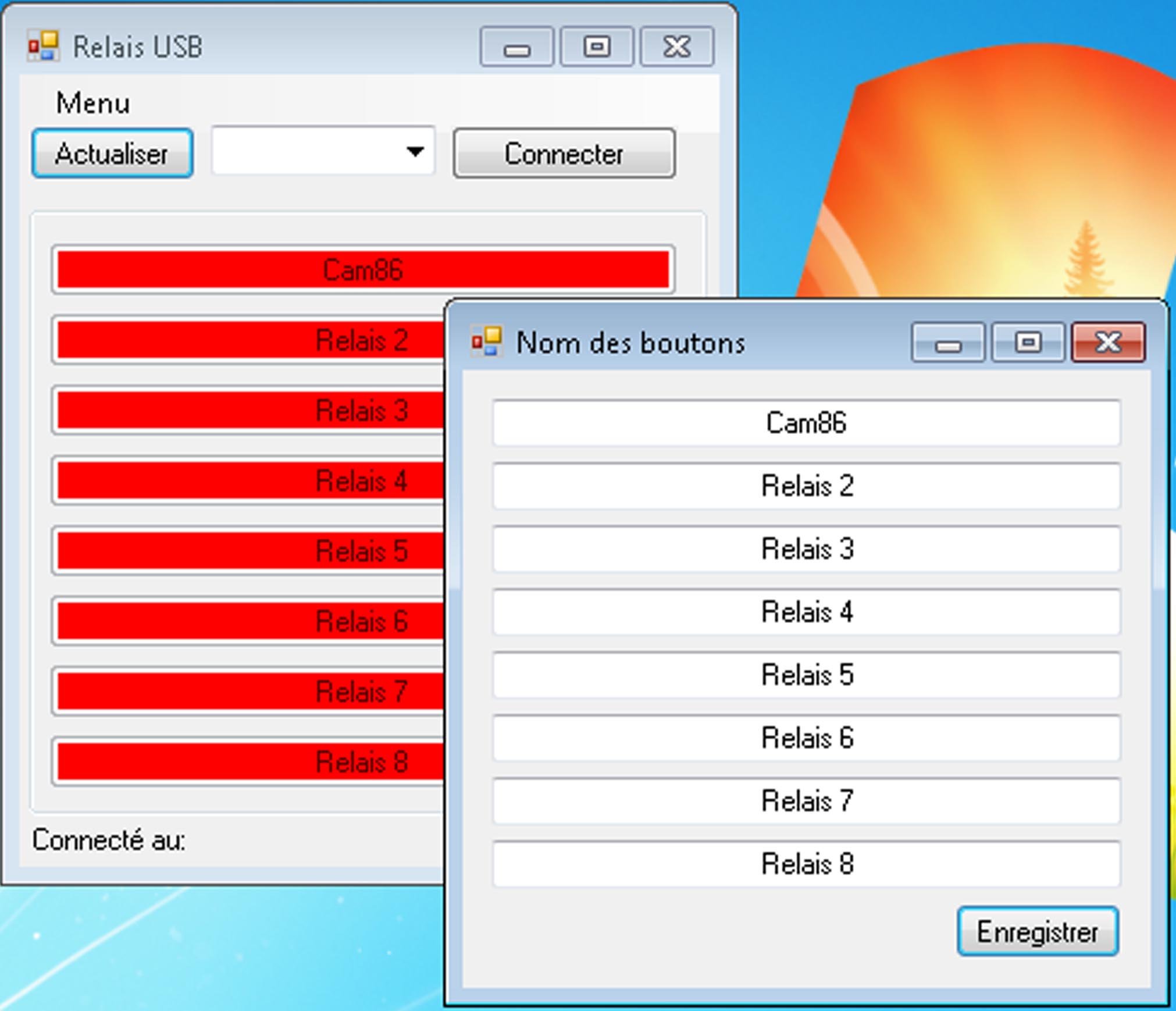
Bonjour, Je vous propose une petite application pour piloter 8 relais reliés à un Arduino. Pour la réalisation rien de bien compliqué. Le petit schéma qui va bien: Pour la carte relais il existe des version 12V et 5V. En choisissant la version 5V, ça permet d'utiliser un chargeur téléphone portable (mini 1A, 2A pour être tranquille). Arduino: Du coté de l'Arduino si vous ne connaissez pas encore, tout ce qui concerne l'installation de l'IDE et l'injection du firmware dans le bestiole est expliqué ici rubrique: Installation/configuration de l'IDE, des drivers et bibliothèques. Sauf que pour ce projet la pas besoin d'installer de bibliothèque. Le firmware pour l’Arduino est disponible ici. Pour ce projet, il n'y a rien de modifier dans le code, il suffit de le téléverser. Application Windows: Le logiciel est écrit en Visual Basic, le fichier d'installation se trouve ici. Pour ceux qui veulent améliorer le soft, les fichiers sources sont disponibles ici. Le programme s'installe en C:\RelaisUSB\. Si vous souhaitez changer de répertoire d'installation, évitez le répertoire d'installation des applications par défaut de Windows, ça créé une erreur lors de la sauvegarde du nom des boutons. L'appli se présente ainsi: Une fois l'Arduino programmé et connecté au PC, il suffit de lancer l'application. L'application crée une liste des ports comm disponible, qui s'affiche dans le menu deroulant. Il suffit d'en choisir un et de cliquer sur "Connecter". Si vous n'avez pas choisi le bon port comm, un message d'erreur vous l’indiquera. Si aucun port comm n'apparait dans la liste il suffit de cliquer sur le bouton "Actualiser". Si lors de l'utilisation vous fermez l'application, les relais conservent leurs état. Quand vous relancerez l'application l’état des bouton s'actualisera en fonction de l’état des relais. Aperçu de la fenêtre pour modifier le nom des boutons: En espérant que cela vous soit utile. Rappel des liens: - Setup du programme Windows. - Firmware Arduino (clic droit sur le lien puis "enregistrer la cible du lien sous")

-
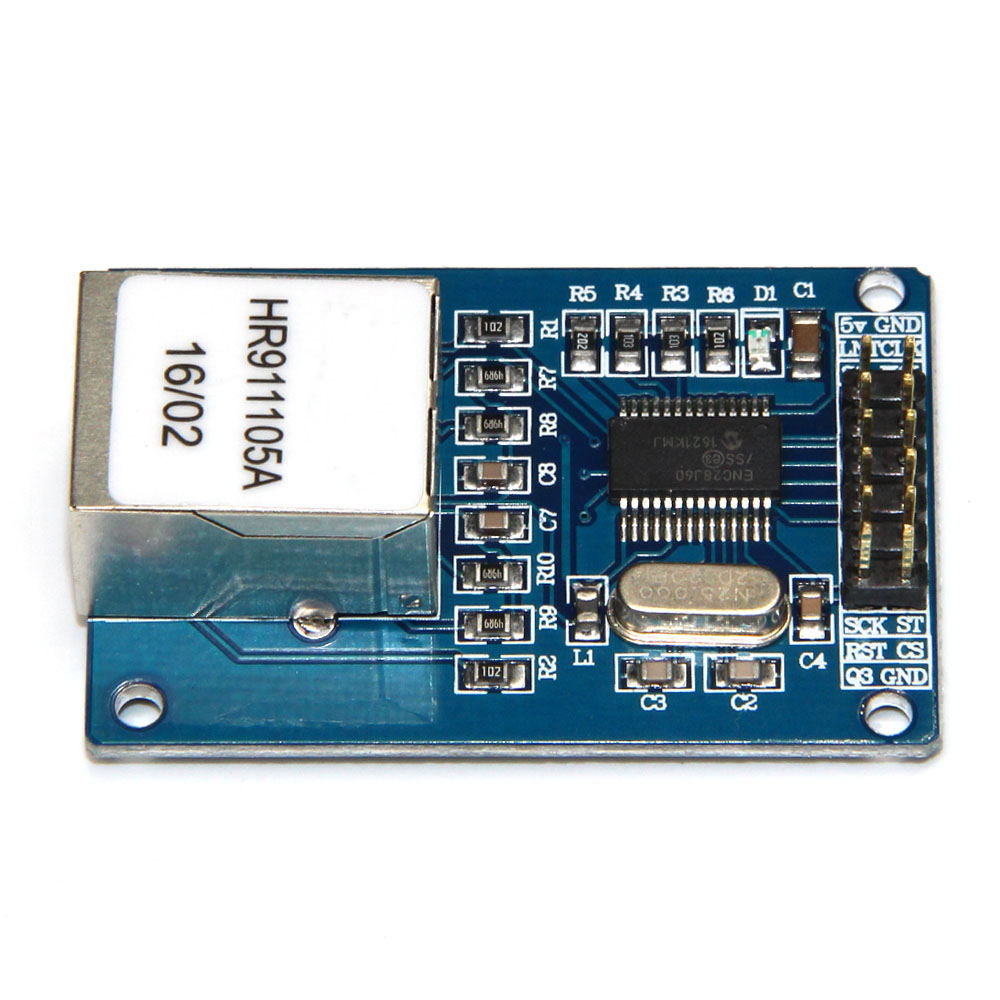
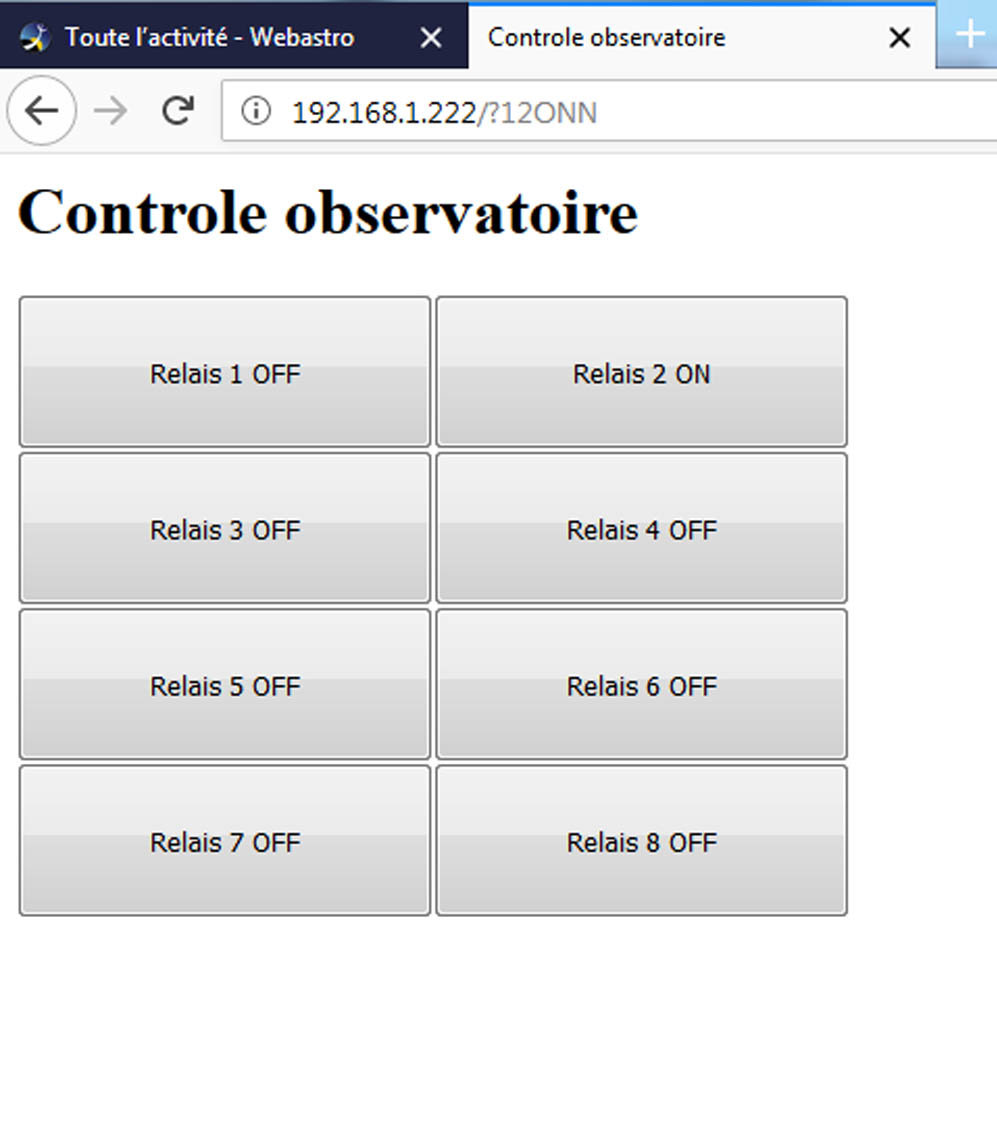
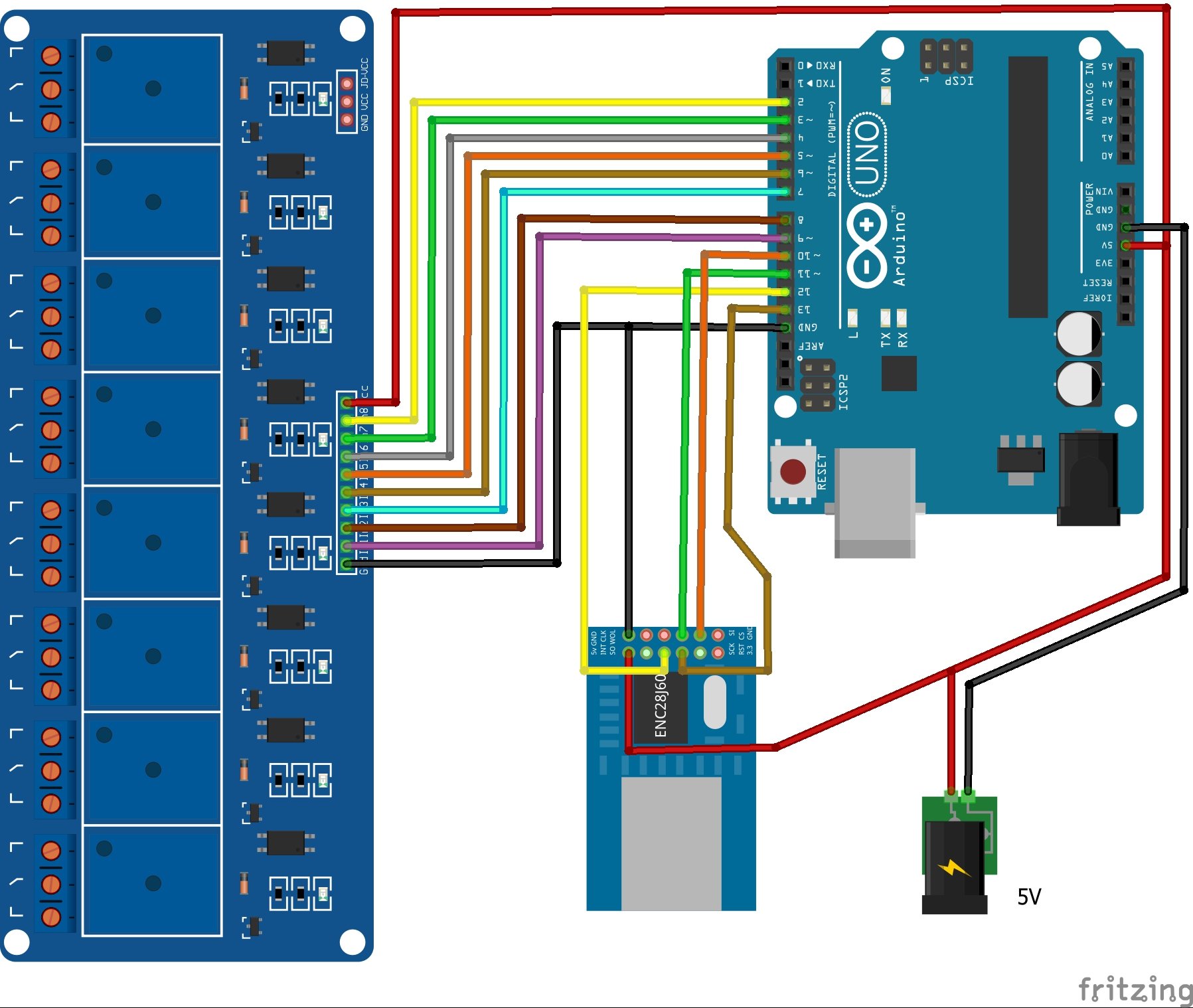
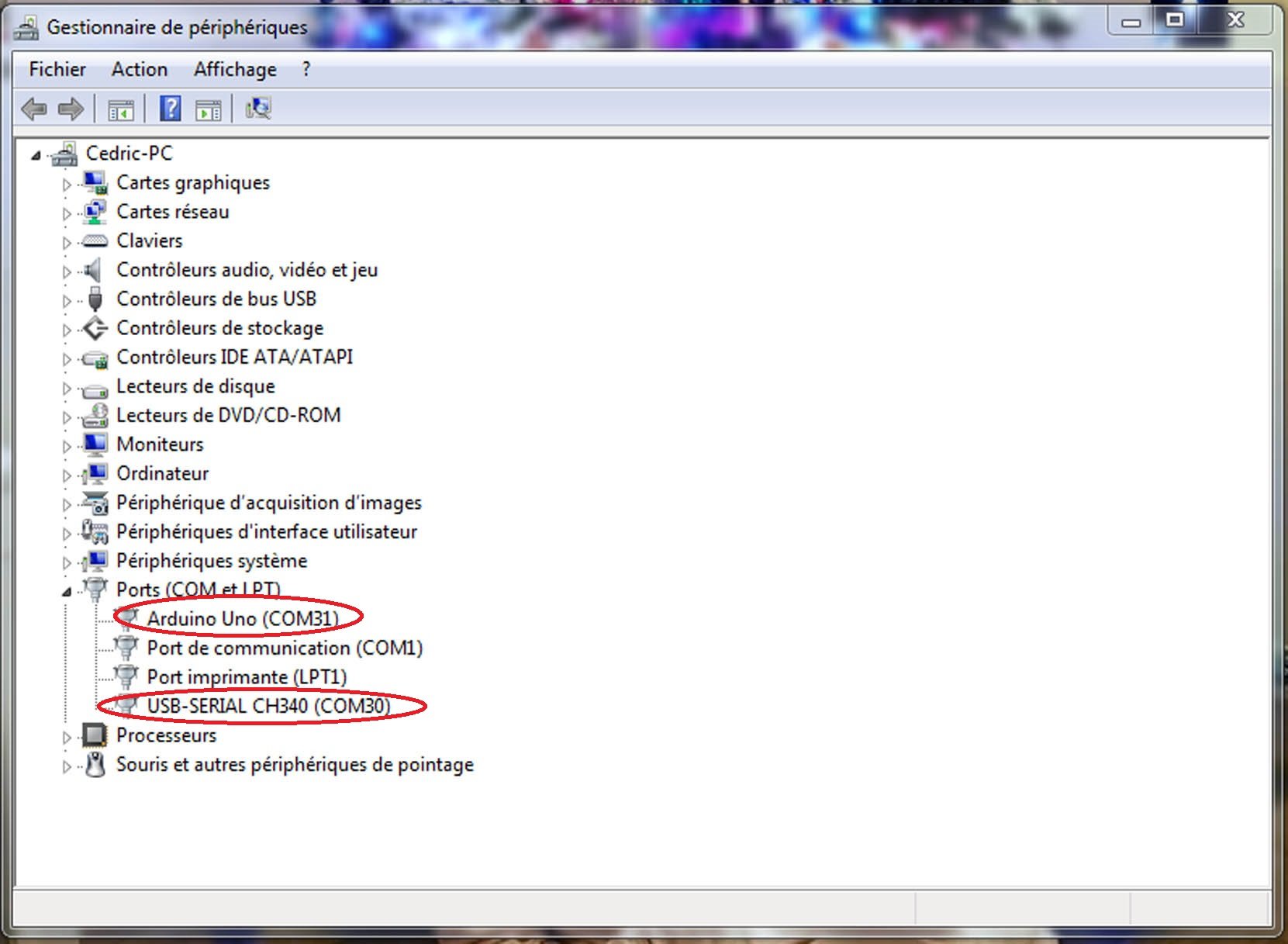
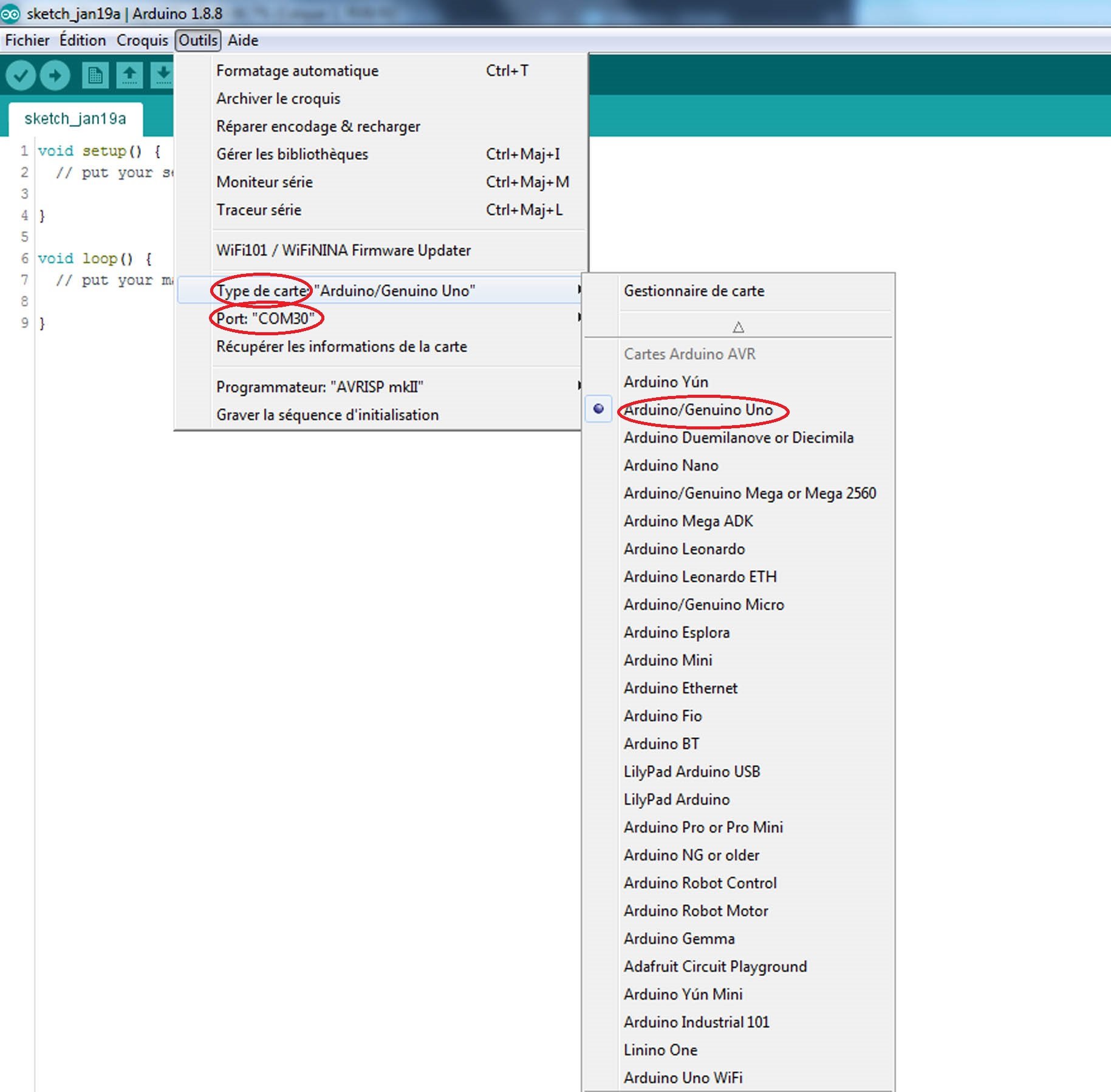
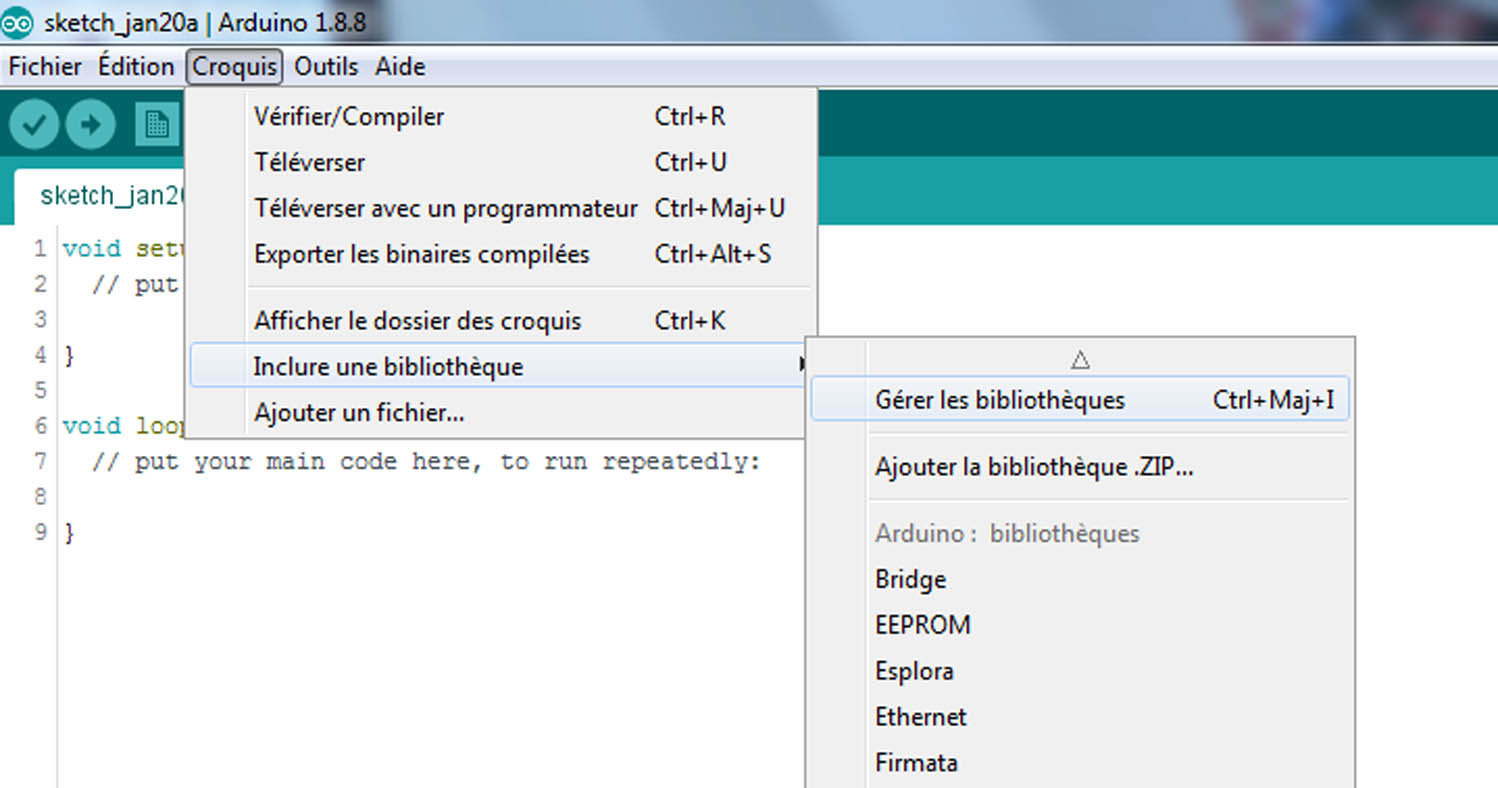
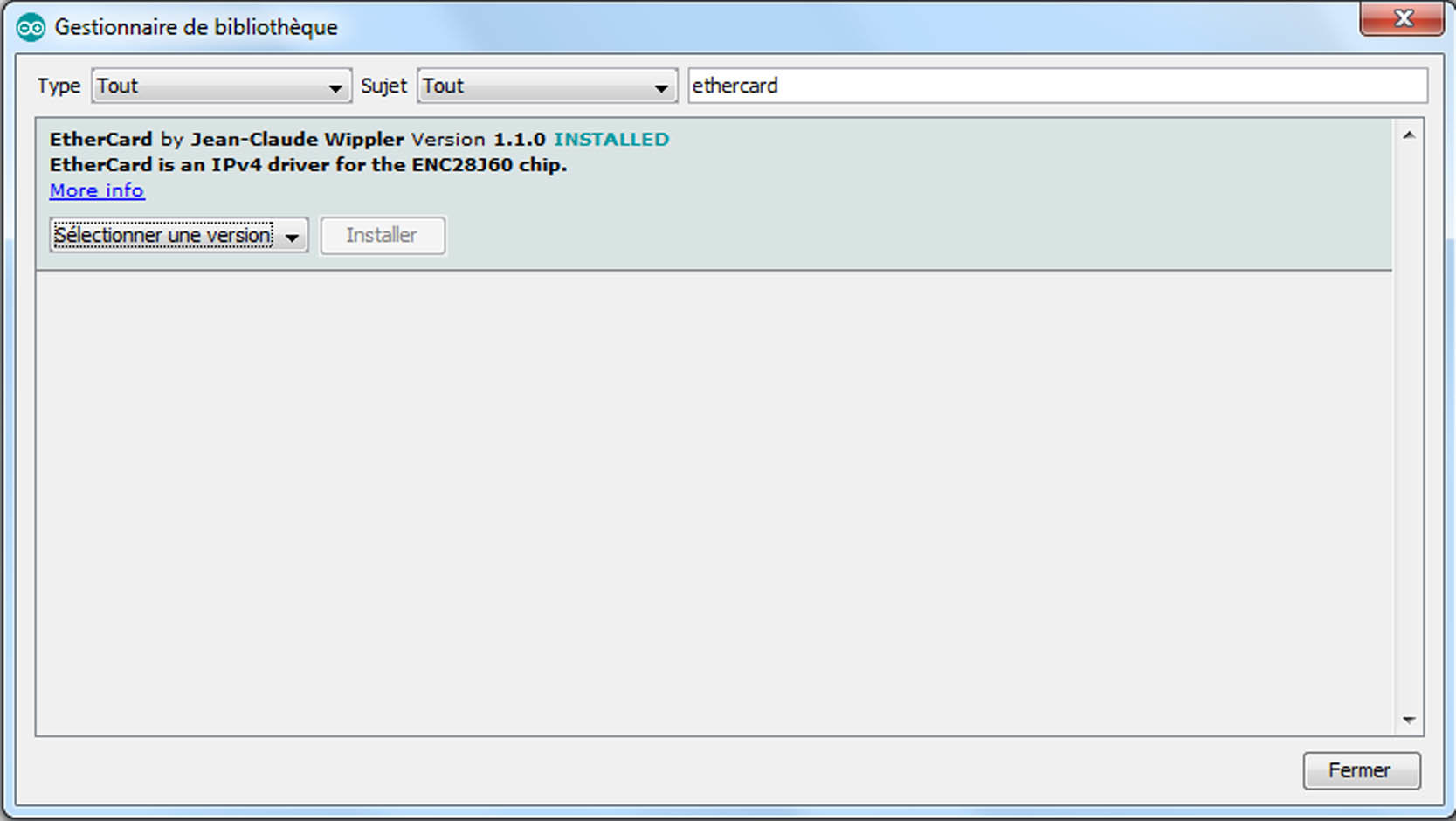
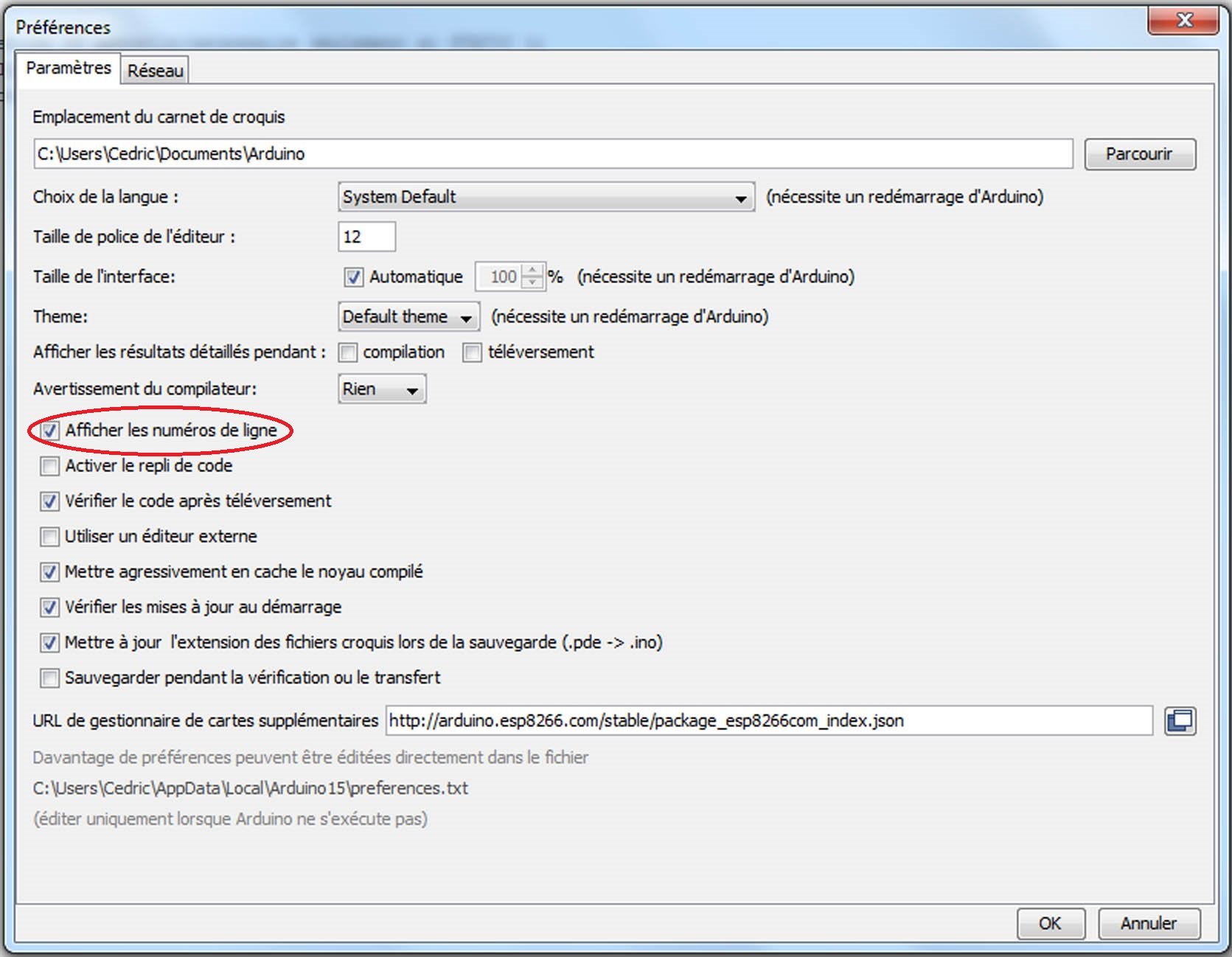
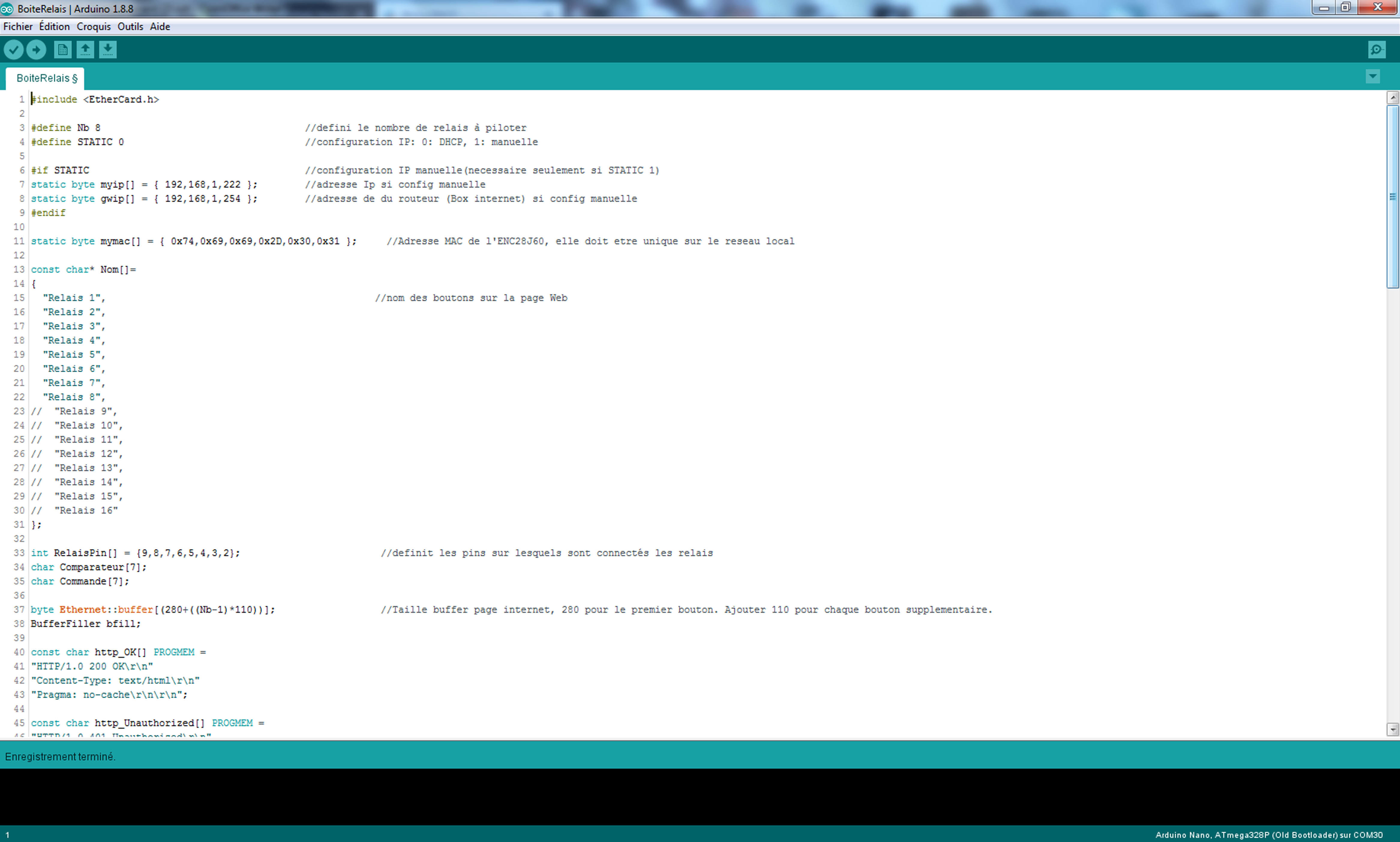
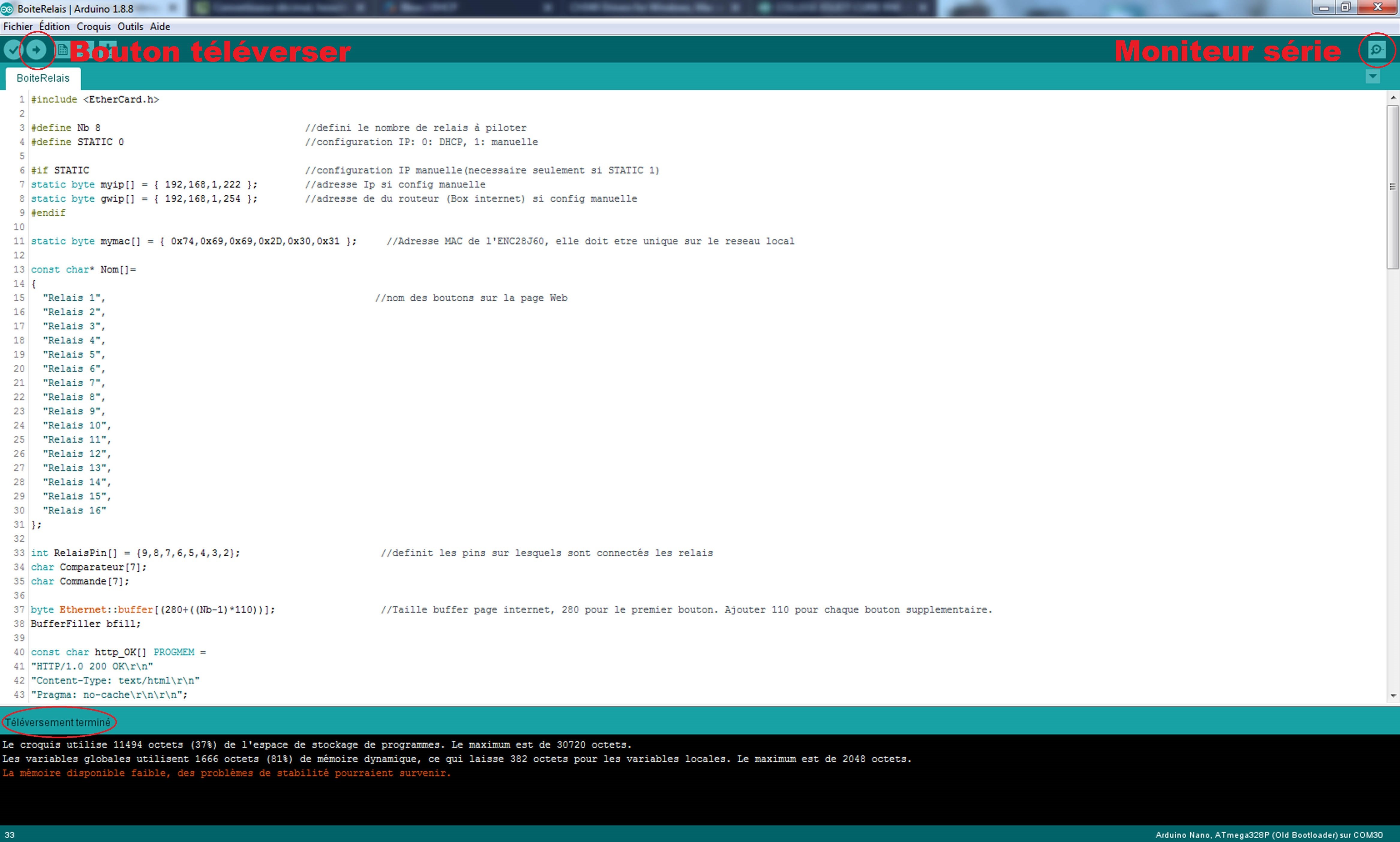
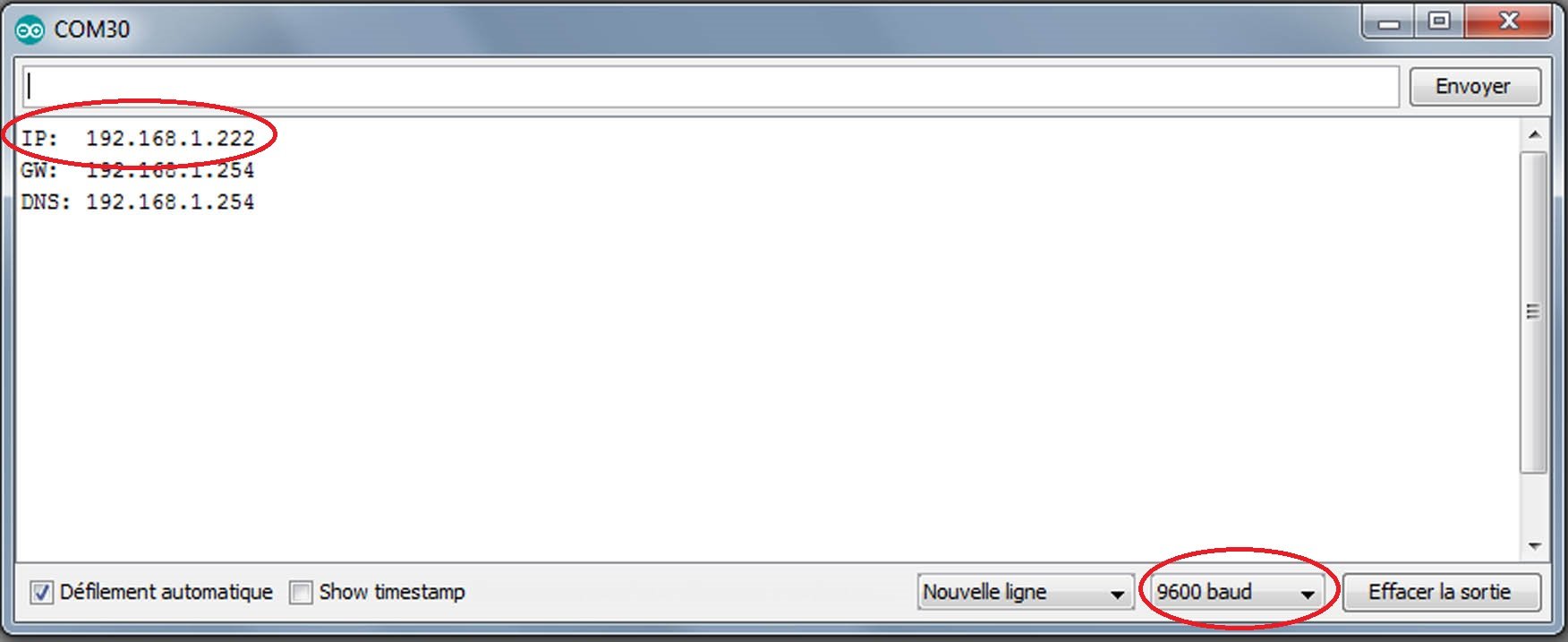
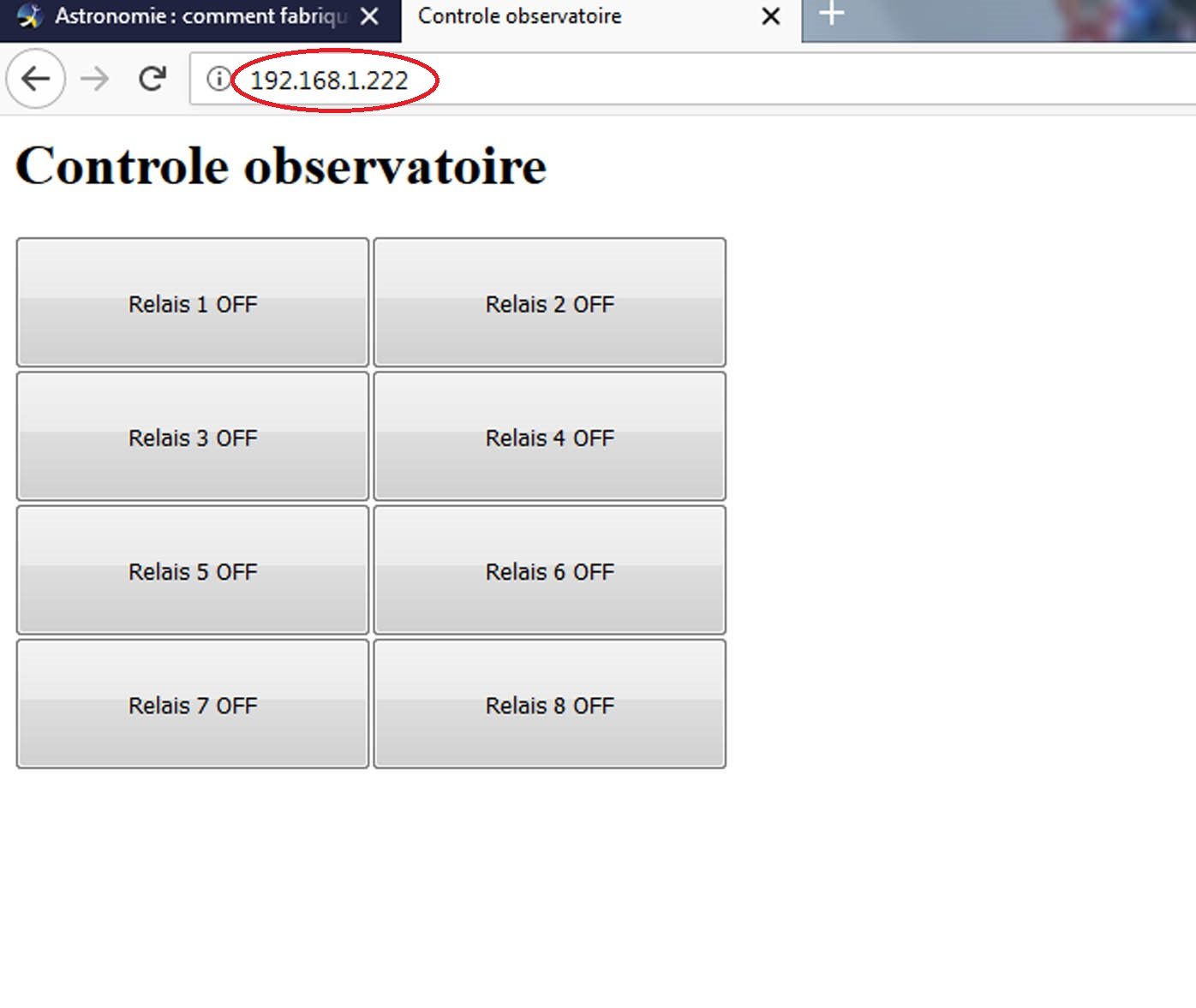
Bonjour, J'ai à cœur de réaliser un micro-observatoire en remote. N'arrivant pas à arrêter tous les choix technique pour la structure, j'ai donc changé de chantier et attaqué la boite à relais Ethernet. Le code a été prévu pour être facilement modulable. Je vais vous présenter une version a 8 relais et expliquer comment l'adapter a vos besoins. Je suis parti d'un Arduino Uno. Pour la connexion Ethernet, je lui ai ajouté un module ENC28J60 (HR911105A) en 5V. La version 5V se différencie de la version 3.3V par le nombre de broches sur son connecteur. 10 pour la version 3.3V et 12 pour la version 5V. Pour les relais, j'ai choisi une carte 16 relais en 5V . Avec le code que j'ai écris et les 2Ko de mémoire de l'Arduino Uno, je ne peux piloter que 10 relais. Si on souhaite piloter plus de relais il faut choisir un Arduino Mega. Ces module relais existent en différentes version, de 1 à 16 relais (et peut être plus?). J'ai tout choisi en 5V de manière à n'avoir qu'une seule alimentation. La boite se pilote à partir d'une interface Web générée par l'Arduino et se présente ainsi: Le nombre de bouton ainsi que leurs noms sont paramétrable facilement dans le code, comme on le verra un peu plus bas. Sur chaque bouton se trouve le nom du périphérique contrôlé ainsi que son état. Réalisation: Je n'ai pour l'instant pas réaliser la mise en boitier. Je pense l’intégrer dans l'armoire électrique de l'observatoire. Le plus simple est de fixer tous les modules dans le fond d'un boitier et relier les différentes cartes entre elles, soit par des câbles dupont, soit en soudant directement les fils sur les broches. Voici le schéma de câblage: Installation/configuration de l'IDE, des drivers et bibliothèques: Pour programmer l’Arduino, il faut télécharger et installer l'IDE. IDE se traduit en français par Environnement de Développement Intégré. C'est le logiciel où l'on crée le code et avec lequel on programme l'Arduino (téléverser). Il se trouve ICI. Il suffit de sélectionner son système d'exploitation et d'installer le fichier téléchargé. Durant l'installation de l'IDE, sous Windows, le système demande a plusieurs reprises des autorisations pour installer des drivers non certifié, c'est tout a fait normal et il suffit d'accepter. Pour les Arduino d'origine chinoise, il faut installer le driver du CH340 (convertisseur USB/série). Le driver se trouve ICI. Il est maintenant temps de brancher l’Arduino. Si tout c'est bien déroulé, l'Arduino devrai s'installer sans problèmes. Allons faire un tour dans le gestionnaire de périphérique pour voir si l'installation s'est bien déroulée et noter le numéro du port série attribué a l'Arduino. Pour cela appuyez sur les touches Windows + R et taper "devmgmt.msc" dans le fenêtre qui s'ouvre et appuyer sur Entrée. Vous devriez obtenir une fenêtre qui ressemble à ça: J'ai connecté deux Arduino, un officiel, sur le port 31, et un chinois , sur le port 30. Nous pouvons maintenant ouvrir l'IDE Arduino. Nous allons maintenant indiquer a l'IDE le type de carte Arduino que nous allons programmer ainsi que le port série sur le quel il se trouve. Cela se passe dans le menu "Outils": Maintenant que l'IDE sait a quelle carte il a a faire et ou la trouver, il ne reste plus qu'a installer la librairie etherCard. Ça se passe dans le menu: Croquis -> Inclure une bibliothèque -> Gérer les bibliothèques (Ctrl + Maj + i): Nous sommes maintenant dans le gestionnaire de bibliothèque. Dans le champ de recherche en haut a droite entrez "ethercard". Normalement le gestionnaire n'en trouve qu'une, celle de Jean-Claude Wippler en version 1.1.0. Il ne reste plus qu'a cliquer sur installer pour terminer l'installation de la bibliothèque: Modification du code et téléversement: Pour nous y retrouver plus facilement nous allons commencer par afficher les numerus de lignes dans l'IDE. Pour ce faire il faut se rendre dans le menu Fichier -> Préférences (Ctrl + Virgule). Là il suffit de cocher la case: Afficher les numéros de ligne: Entrons maintenant dans le vif du sujet: le code. Vous pouvez le télécharger ICI. Une fois le fichier ouvert dans l'IDE vous devriez avoir quelque chose qui ressemble à ça: 1/ La première ligne intéressante se trouve ligne 3. #define Nb 8 Elle définit le nombre de boutons qui seront générés par le serveur Web. Il suffit de remplacer le 8 par le nombre de relais que vous souhaitez utiliser. 2/ Ligne 4 se trouve la ligne ou l'on configure le mode de paramétrage IP. Soit par DHCP, soit manuel. #define STATIC 0 Par défaut (0), c'est la configuration par DHCP qui est activée, vous n'avez rien a faire, c'est votre BOX qui se chargera d'attribuer une adresse IP a votre interface. Si vous souhaitez paramétrer vous même l'adresse IP, il suffit de passer le 0 à 1. 3/ Si vous avez choisi de configurer manuellement votre adresse IP, les ligne 7 et 8 vont vous intéresser. Si vous avez laisser STATIC à 0 vous pouvez passer directement point 4. static byte myip[] = { 192,168,1,222 }; static byte gwip[] = { 192,168,1,254 }; Ligne 7 vous pourrez entrer votre adresse IP et ligne 8 l'adresse de votre passerelle par défaut. 4/ La 11 ligne définit l'adresse MAC de l'interface réseau. static byte mymac[] = { 0x74,0x69,0x69,0x2D,0x30,0x31 }; L'adresse MAC doit être unique sur votre réseau local. Si vous souhaitez la modifier il suffit de remplacer les nombre après chaque 0x. Si vous ne savez pas a quoi cela correspond, laissez l'adresse tel quel, ça serai vraiment pas chance que se trouve sur votre réseau un autre appareil ayant cet adresse MAC. 5/ Ligne 15 à 30, c'est a cet endroit que l'on change le nom des boutons. "Relais 1", "Relais 2", "Relais 3", "Relais 4", "Relais 5", "Relais 6", "Relais 7", "Relais 8", "Relais 9", "Relais 10", "Relais 11", "Relais 12", "Relais 13", "Relais 14", "Relais 15", "Relais 16" Il suffit de modifier les noms entre les guillemets. 6/ Enfin ligne 33, si vous souhaitez utiliser plus de 8 relais c'est ici qu'il faut indiquer sur quelles broches de l’Arduino sont connectés les relais. int RelaisPin[] = {9,8,7,6,5,4,3,2}; Il suffit d'ajouter les numéros de broches à la suite du 2 et de les séparer par des virgules. Maintenant que le code est adapté a vos besoins, il ne reste plus qu'à le téléverser vers l'Arduino. Pour ce faire appuyez sur le bouton téléverser en haut à gauche (bouton rond avec une flèche pointant à droite). Une fois appuyé sur le bouton "téléverser", l'IDE va compiler le code et ensuite le téléverser. Vous pouvez suivre l'avancement de ces étapes dans la fenêtre noire en bas de l'IDE. A la fin du téléversement, si tout s'est bien passer vous devriez avoir le message: "Téléversement terminé" en bas a gauche dans le bandeau vert. Dans la fenêtre noire un avertissement s'affiche concernant la quantité de mémoire restante. Cela ne pose pas de problèmes sur un Arduino Uno jusqu'a 10 relais. Le miens est connecté depuis deux mois, je m'y connecte régulièrement pour vérifier le fonctionnement et il ne m'a pour l'instant jamais fait défaut. Si vous avez choisi la méthode DHCP pour configurer votre adresse IP, il faut ouvrir le moniteur série pour voir quelle adresse IP votre serveur vous à attribué. C'est un bouton en forme de loupe en haut à droite de la fenêtre. On arrive sur cette fenêtre: Il faut vérifier en bas à droite que la vitesse de communication est bien réglée a 9600 baud. Si rien ne s'affiche dans le moniteur série, il faut appuyer sur le bouton Reset de l’Arduino. Maintenant que vous avez l'adresse IP de la boite à relais, lancez votre navigateur Internet préféré et tapez l'IP dans la barre d'adresse puis entrer et vous devriez arriver sur une page semblable a celle ci: J’espère que cela pourra vous être utile. Voici un petit récapitulatif des liens: - IDE Arduino. - Driver CH340. - Code Arduino.