HPMâd
-
Compteur de contenus
275 -
Inscription
-
Dernière visite
-
Jours gagnés
3
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par HPMâd
-
Demande de confirmation du pas de la vis de focus sur C8 EDGE (projet de focuser DIY)
HPMâd a répondu à un sujet de Ameleo37 dans Les bricoleurs
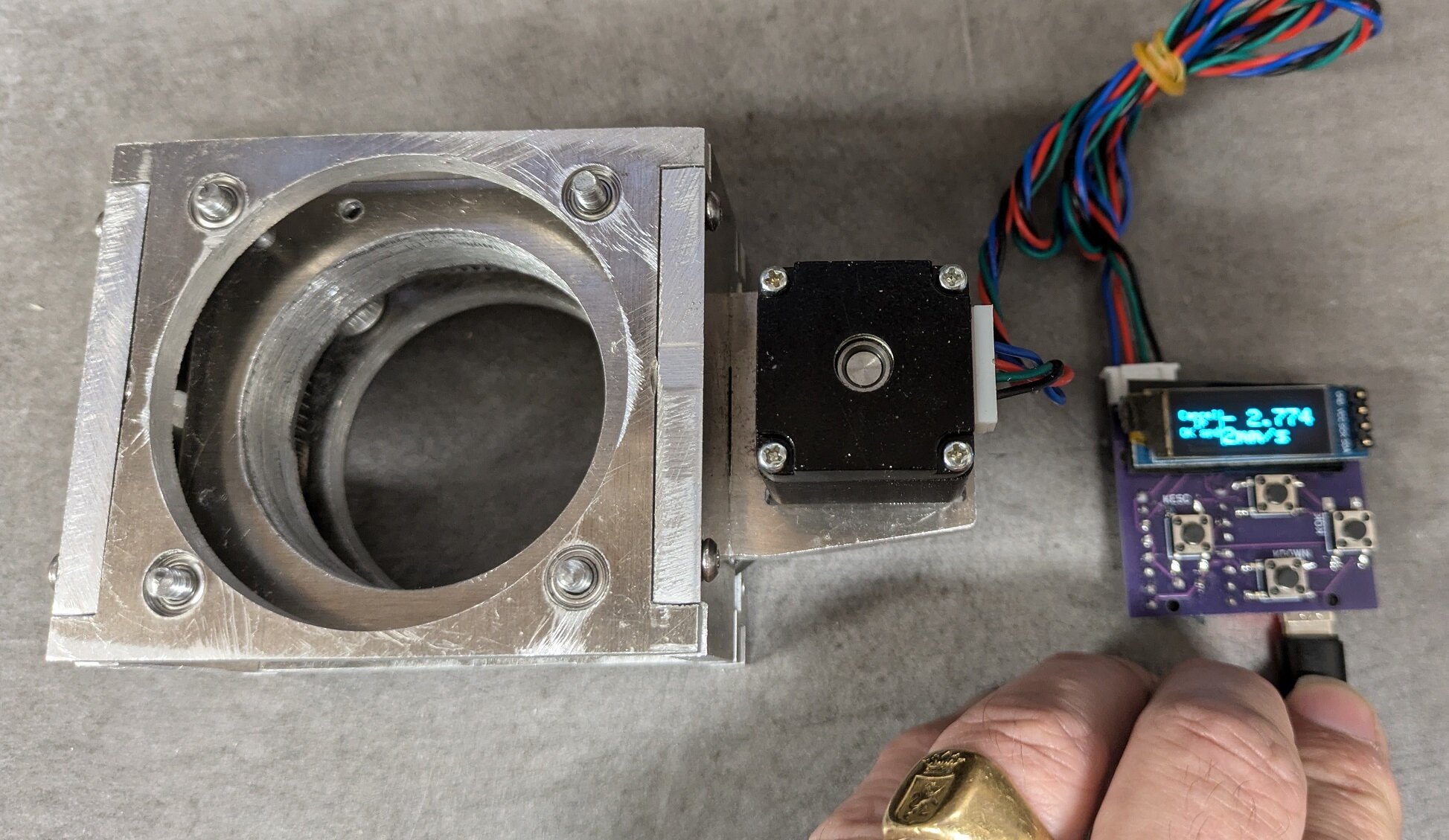
Les nema 17 ont l'avantage d'etre TRES peut cher et d'avoir pas mal de couple. Mais ils font 43mm. Les nema 14 (comme dans la photo), sont environ 2 fois plus cher, ont moins de couple, mais sont plus petit a 28mm. Il faut voir la difference entre un nema17 "plat" (20mm) qui coute 6€ pour 14n/cm de couple, et un nema11 de 34mm qui coute 10€ pour seulement 7n/cm de couple... J'avais un pb d'encombrement pour le PO ci dessus. D'ou mon choix d'un nema11. Mais sinon, j'aurais pris un nema17! Cyrille -
Demande de confirmation du pas de la vis de focus sur C8 EDGE (projet de focuser DIY)
HPMâd a répondu à un sujet de Ameleo37 dans Les bricoleurs
Salut, J'avais pas mis la repo en public 🙂 Maintenant, c'est fait! https://github.com/Cyrille-de-Brebisson/One_Motor_Focuser Pour les moteurs d'imprimante, méfie toi et vérifie la resistance. Si c'est des moteurs basse resistance (sous les 10ohms), pas de problème, mais certaines utilisent des moteurs haute resistance (genre 30ohms) qui demandent des haut voltages (24, 30V)... L'avantage de mon système c'est qu'il marche en 5V, donc juste une connection USB 🙂 Cyrille
-
Pied semi permanent DIY - besoin de critiquer la solution
HPMâd a répondu à un sujet de thelover3 dans Les bricoleurs
Ha les filles ha les filles 🙂 Mais si tu coule ton béton comme un socle (genre 50*50*10cm d'épaisseur) et un cylindre (20cm*100cm), ca fait aux alentours de 150kg... c'est déplassable avec 2/3 copains (en le faisant rouler par example) si besoin est.. Cyrille -
Demande de confirmation du pas de la vis de focus sur C8 EDGE (projet de focuser DIY)
HPMâd a répondu à un sujet de Ameleo37 dans Les bricoleurs
Voila le lien vers le projet. J'ai des PCB en rab si tu veux... https://github.com/Cyrille-de-Brebisson/One_Motor_Focuser -
Demande de confirmation du pas de la vis de focus sur C8 EDGE (projet de focuser DIY)
HPMâd a répondu à un sujet de Ameleo37 dans Les bricoleurs
Salut, 90% des softs d'astro travaillent en pas, pas en distance pour le focus. Connaitre le ratio pas vs distance est donc secondaire dans 90% du cas. En F/D10, tu a tellement de marge de focus que normalement tu n'auras aucun problème de "précision" de ton système de focus. C'est la bonne nouvelle. Il en découle que tu n'a pas besoin de travailler en micros pas sur ton moteur pas à pas! C'est "important" car le couple varie en fonction du nombre de micros pas, et les moteurs ont un "bloquage" naturel "sur les pas". Donc, si tu est en "pas plein", arrivé à destination, tu peux "couper" le moteur et sauver de la puissance sur ton setup, surtout si tu est nomade 🙂 Pour la partie électronique. Si tu n'as pas déja un truc, j'ai des PCB qui controlent 1 moteur pas à pas, avec un control par ordi (Ascom), et 4 touches pour un controle manuel si sa t'intéresse... Il faut qu eje publie le truc d'ailleur! Cyrille -
Pied semi permanent DIY - besoin de critiquer la solution
HPMâd a répondu à un sujet de thelover3 dans Les bricoleurs
Salut, Si c'est chez toi, pourquoi pas un pied béton? Pas que ta solution soit mauvaise, mais un pied béton sera probablement moins cher, et certainement moins de travail 🙂 Cyrille -
Sytème de collimation automatisée - Mirrotation
HPMâd a répondu à un sujet de Agenax dans Les bricoleurs
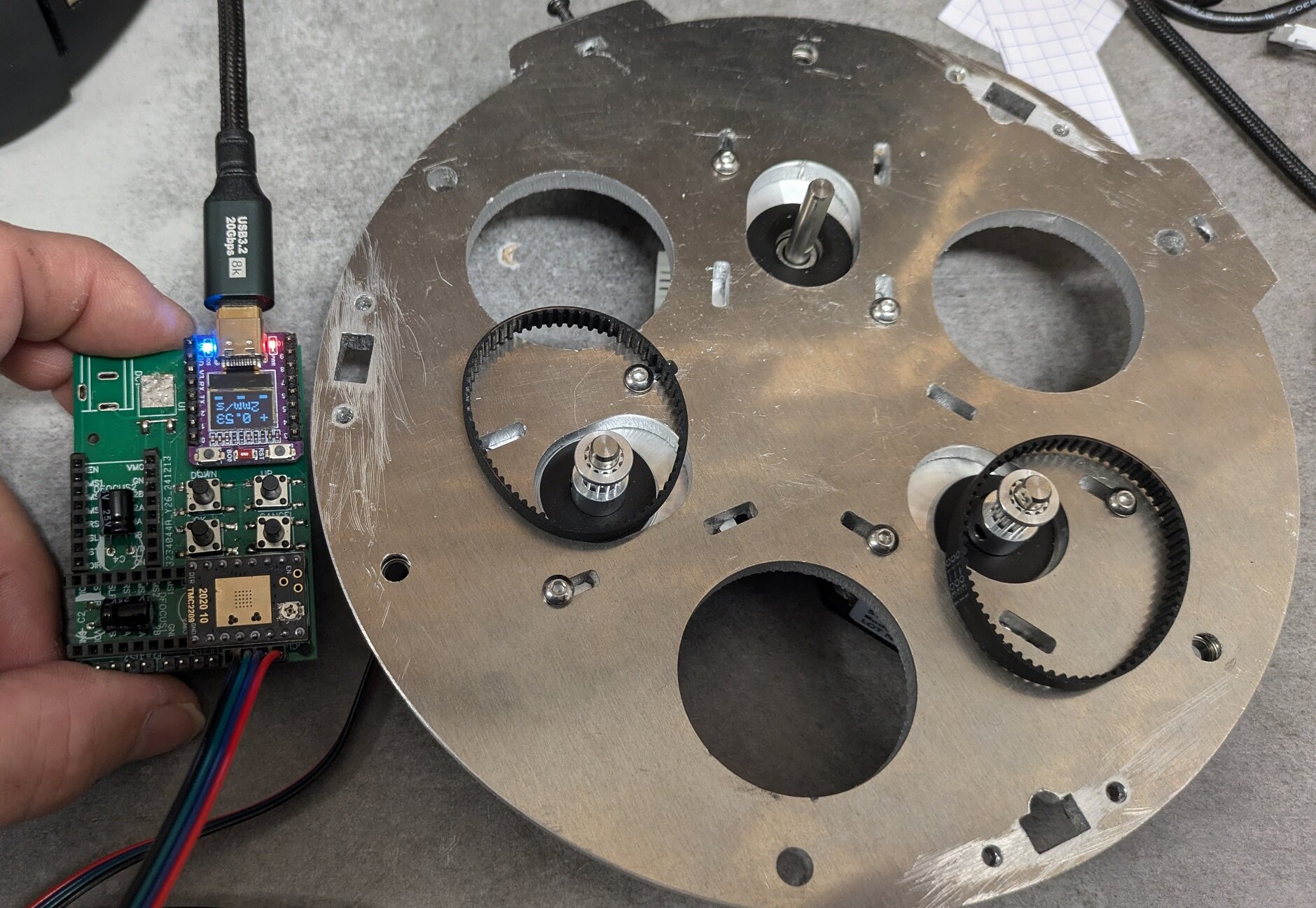
Salut, Splendide boulot! J'ai justement fini hier un système similaire pour un astrographe que je suis en train de faire! Bon, j'ai pas mis le control de résistance chauffante, mais j'ai la partie control de 3 moteurs (qui sont en prise directe). A la lecture de ton post, il semble que toute la partie HW/FW marche bien, c'est vraiement la partie app PC/Android qui est problématique? Comme mon utilisation est astrophoto, je pensais utiliser sharpcap (via Ascom) pour faire cette partie. Sharpcap à un module (experimental) de mesure de la décolimation et permet, vias scripts, d'agir sur des systems ascom. Cela m'évitera une grosse partie des problèmes que tu semble avoir. Peut être pourais tu faire la meme chose? Quand j'aurais compris comment ca marche (si!), je pourais te refiller ce que j'ai trouvé. En tout cas joli! Cyrille
-
Désole, Apres, si tu es bricoleur, une monture de 400 ca se fabrique 🙂 J'ai des plans si tu veux... Mais ma monture est... un peu spéciale! Mais ira super bien avec un 400 f4. https://sites.google.com/view/brebisson/home/400-single-pole-low-rider?authuser=0 Bonne chance!
-
Bonjour, Si tu passe d'une focale de 120cm (3*40) a 160cm (3.97*40), il faudra rallonger de 40cm. Mais je pense qu'il y a une erreur quelque part, Cette monture ne semble pas être pour du f3! Donc, dimensions à vérifier 🙂 Sinon, oui, l'idée n'est pas mauvaise, et certainement faisable, tant que tu arrive à trouver les tubes du bon diamètre... Par contre, une structure comme ca a 3 tubes verticaux n'est pas tees stable dimentionellement (changement de colim selon l'altitude de visée), je préconiserais l'ajout de fils de tension comme ici en rouge (c'est une technique classique). Bon, pas besoin de se lancer tant que tu n'as pas constaté de problème, mais il faudra probablement y passer à un moment. Cyrille
-
Monture harmonique DIY et OnStep : je comprends la mécanique… mais il reste du progrès à faire !
HPMâd a répondu à un sujet de Felipero dans Les bricoleurs
Bonjour, Clairement les encodeurs absolut a 25 bits ou plus ca coute 1 bras et une jambe... et comme il en faut 2 Le pb avec le moteur a encodeur 23 bits (et honnêtement, si on pouvais utiliser cet encodeur directement, ca ferait une précision de 0.15 arc", ce qui est largement suffisant étant donne un seeing généralement >1arc"). Donc, je disais le pb c'est que l'encodeur est sur le moteur, il faudrait le mettre sur l'axe du télescope, et la sa serait impec! Car si tu le met sur le moteur, tu ne prends pas en compte les problèmes sur la transmission... Maintenant, est il possible de détacher cet encodeur pour le mettre sur l'axe du scope? je ne sais pas... Par contre, pour ce qui est du "faux rond", c'est pas in problème car il peut etre caractérisé et corrigé. De plus ce qui est important dans l'encodeur haute précision, c'est surtout la boucle d'asservissement, qui est locale... l'absolu, qui sera affecté par le faux rond est moins génant. Si ton scope pointe 5arc" a droite ou a gauche, c'est pas grave... Donc pour revenir à ton pb, je ne pense pas que ce moteur soit utile tel quel. Si l'erreur dans la mechanique est de 30arc", ca ne sert a rien d'avoir un encodeur sur le moteur à ce genre de précision... Cyrille -
Monture harmonique DIY et OnStep : je comprends la mécanique… mais il reste du progrès à faire !
HPMâd a répondu à un sujet de Felipero dans Les bricoleurs
Salut, Donc, tu as pas réellement besoin de home ou équivalent... ca résout ce problème... Tu peux poster le lien sur les moteurs avec encodeurs 23 bits? Ca fait 8millions de pas, donc une précision de 0.12 arc"... La question est de savoir si la position du moteur peut être contrôlée avec cette précision? Ensuite, si tu veux avoir un "absolut" (mais moins précis), comme je le disais je suis en train de m’amuser avec des capteurs dx/dy/dz qui devrais permettre de le faire... Le direct drive (genre les Nova de Alcor System), normalement le moteur contrôle directement la monture sans réduction. C'est ca que tu pensais faire? Cyrille -
Monture harmonique DIY et OnStep : je comprends la mécanique… mais il reste du progrès à faire !
HPMâd a répondu à un sujet de Felipero dans Les bricoleurs
Salut, Ca fait 40€ le moteur 😞 et en plus il est plus gros et il y a une perte de couple 😞 J'ai essayé de bosser avec des moteurs à encodeur, la version précédente de ces trucs: https://fr.aliexpress.com/item/1005005593922187.html Mais pas génial. Pas assez de doc et un système mal foutu... Sans doc correcte, je n'irais pas dans cette direction. Pour ton pb de homming, Comment tu compte trouver la "maison"? Avec un encodeur absolut, tu connait la pos du moteur... mais pas de la démultiplication... donc tu peux être précis a 3.6° (avec un reduc de 1/100)... Je me suis posé la question pour mon setup de savoir si je développait un home... (https://github.com/Cyrille-de-Brebisson/eq_control) Au final j'ai laissé tombé... voici pourquoi: - Dans mon système, je demande à l'utilisateur de démarrer avec le scope pointant au "nord" (barre AD vers le bas, dec=90°). - Au démarrage, je calcule l'AD à partir des infos de position et la date (soit via le driver ascom et l'heure du PC, ou plus récemment sur la monture via un module GPS). Cela me donne la position du telescope à l'erreur de positionnement mechanique près (quelques degrés). - L'utilisateur, apres avoir fait le focalisation et la mise en station (je suis nomade), fait un goto, plate solve/resync... et c'est fini... Avec un système de "home", je serais plus précis, c'est vrais (sous le degré?) MAIS, j'aurais toujours a faire un plate solve/resync pour récupérer les infos pour la fraction de degré! Je ne gagne donc rien en utilisation (à moins d'avoir un capteur absolut sur l'axe primaire comme une monture direct drive, mais c'est pas le meme prix!)... Je suis en train de regarder ce que l'on peut faire avec un capteur dit 9 axes (acceleromètre), qui permet de connaitre le vecteur gravitée. Comme pour le home la précision n'est pas top (1/2° peut être)? donc on ne gagne rien au démarrage par rapport a un "homing sensor" Par contre ca peut être utilisé pour la gestion des limites/sécurité. donc ca à un intéret... Mais les maths son.... intéréssants! Voila, si tu veux faire un truc custom et que tu n'as pas complétement décidé sur le système de controle je suis près a bosser avec toi en me basant sur la raquette que j'ai faite (j'ai des cartes mères en rab)... l'avantage c'est qu'on peut tout modifier/adapter facilement car c'est moi qui ai fait le code... D'un autre coté, c'est probablement moins robuste que les sytème existant. Mais ca à d'autres avantages (taille, clavier/ecran intégré...) PM moi si intéréssé. Cyrille -
Monture harmonique DIY et OnStep : je comprends la mécanique… mais il reste du progrès à faire !
HPMâd a répondu à un sujet de Felipero dans Les bricoleurs
Ayant eu assez de pb avec l'elasticitée des courroies, je suis 100% pour la prise directe.. Si tu arrive a avoir une reduc harmonique >100, 400pas sur un nema24 et 256µpas (TMC2209 ou meilleur) ca fait environ 1/10 arc" ce qui est tout a fait suffisant avec un seeing généralement > 1s... Maintenant, je n'ai jamais vu de nema24 a 400 pas. une harmonique a 120 avec 256µpas et 200 pas = 0.2 arc" ce qui est tout de meme ok je pense... Souviens toi aussi que plus on fait de µpas moins bien ca marche. done je ne pense pas que, dans la réalitée, passer a 512µpas change quoi que ce soit. Cyrille -
re-salut, En fait, le pb avec la 9 points, c'est que les calculs de première génération (avec des triangles équilatéraux) créaient 2 anneaux de supports, un a 3 points à l'intérieur, et un de 6 points a l'éxterieur... Anneaux grossièrement a 30 et 60% du rayon. Mais, maintenant, avec plop en mode "angles libres et refocus", on s'appercois que la meilleur 9 point est en effet tres proche d'un seul anneau de 9 points... Il en découle des triangles "tres fins" (hauteur faible). A cause de cela l'équilibrage des dits tirnagle est assez dure (il faut être super précis). Et toute erreur change drastiquement l'équilibre des triangles et rend le support inégal et la cellule moins bonne que la 6 points... La 9 points à l'anciène est pratiquement equivalente a la 6 points et la 9 point moderne est seulement meilleur si "parfaite"... il en résulte que la 6 point sufit largement. Et ce jusqu'à un miroir de 400mm. Cyrille
-
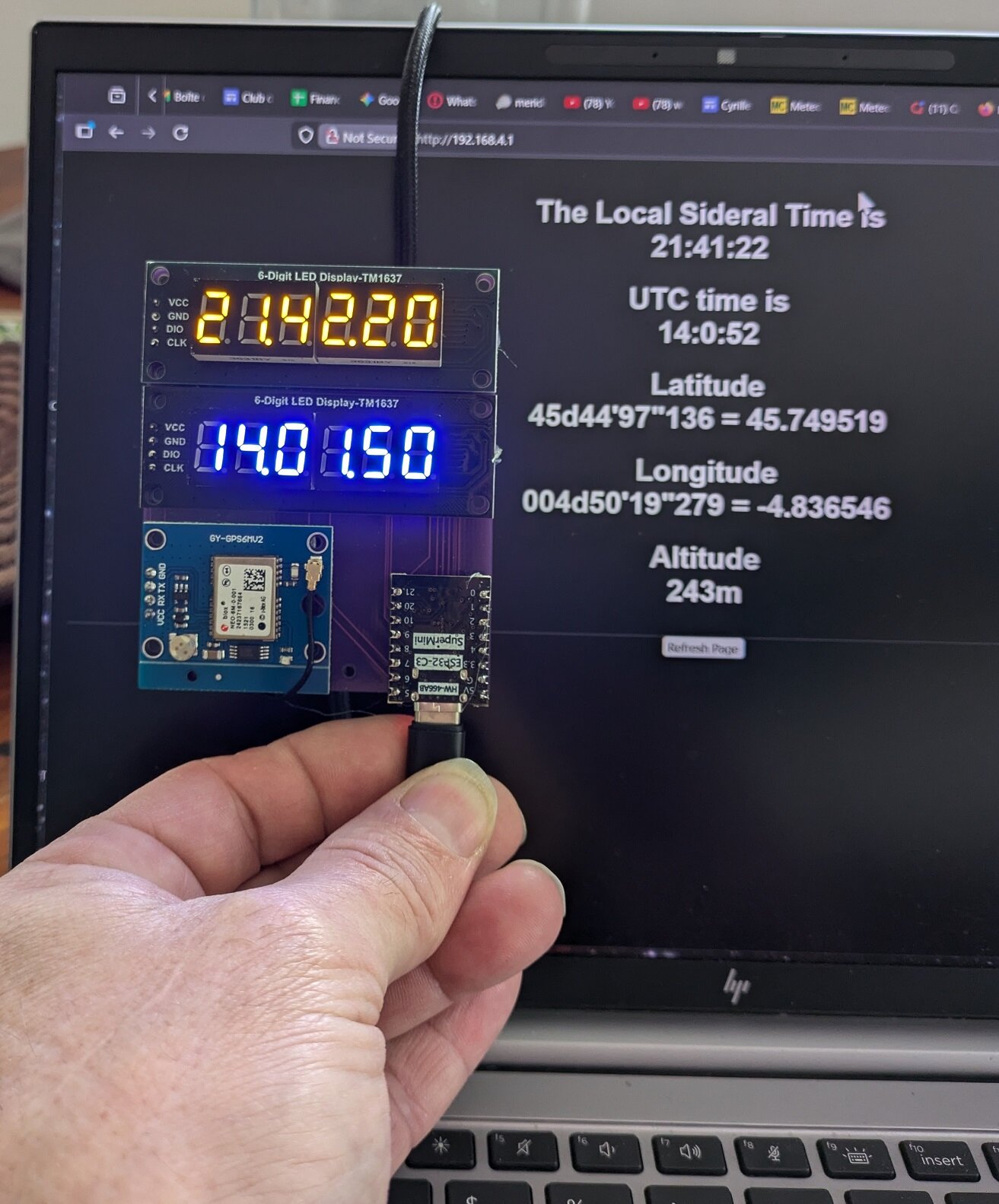
Yep! Je suis un super riche, sur un super Yach (super haut)! Est ce que c'est plus crédible que l'alternative (je me suis planté dans le code?) Bon, en fait le pb c'etait le format venant du GPS que je n'avais pas bien compris. M'enfin, le 44d45'97s aurais dut me mettre la puce à l'oreille! Bon, c'est corrigé. Et je suis a Lyon avec une longitude est... Cyrille
-
Bonjour, Après m'être fait avoir pour un n-ième fois sur un événement a cause des horaires UTC vs locales, avec ou sans l'heur d'été, j'ai décidé de faire un affichage qui me donne l'heure UTC... Le plus simple étant de la récupérer via un GPS, j'ai fait cet affichage qui donne l'heure UTC, l'heure sidérale locale, et les données GPS (via le wifi). toutes les données sur le projet sont ici : https://github.com/Cyrille-de-Brebisson/LocalSideralTimeGPS Et voila le résultat. Il me reste 1 ou 2 PCB si quelqu'un veut faire une copie. Cyrille
-
Salut, A moins que se soit trop tard, laisse tomber la cellule 9 points et utilise 6 points, plus simple a faire et marche aussi bien. En fait, le truc est que pour que la 9 points soit mieux que la 6, il faut qu'elle soit parfaite. Hors on n'est jamais parfait... donc 6 points est une meilleur solution (a moins d'avoir un miroir ultra fin). sinon, superbe travail! bon courage. cyrille
-
Joli! Bravo
-
Je confirme 3 plots a 120°
-
Monture harmonique DIY et OnStep : je comprends la mécanique… mais il reste du progrès à faire !
HPMâd a répondu à un sujet de Felipero dans Les bricoleurs
Bonjour, Je suis 100% d'accord que les courroies causent des problèmes... Quand je motorise des EQ3, je met les moteurs en prise directe pour régler ce problème... Pour ce qui est de moteurs en boucle fermée, tu a aussi 100% raison, l'asservissement n'est pas à la limite des micros pas. Par contre, il donne une position absolue, et le moteur sais ou il en est dans sa sequence de micros pas, donc il peux s'y retrouver si des pas (complets) sont loupés (en fait sont sautés, car c'est ca qu'il est capablde de détécter)... Par contre, il n'est pas capable de détécter qu'il est au micro pas "50" alors qu'il envoie le courent pour micro pas "55"... Perso, je le ferais en prise directe a 120 avec des nema23 si tu à la place. Le couple du 23 devrais limiter le problème de decalage de micros pas... Puis j'utiliserai un BNO055 comme capteur absolut (basse résolution) pour terminer le setup. Pas besoin de capteur haute précision. Cyrille -
Salut, Le pb des A4988 c'est le manque de micros pas, et donc de precision. Au moins des drv8825 avec 32 micros pas... il doit me rester des pcb compatibles drv8825 avec si tu veux... mais c'est pas one-step mais mon propre systeme... cyrille https://sites.google.com/view/brebisson/home/eq3-goto-controler?authuser=0#h.yt7jseo4f5fi
-
Je ne sais pas.. si je peux avoir access aux moteurs oui, c'est certainement possible. Si pas d'acces alors c'est plus complique. Cyrille
-
En fait, la question que je me pose c'est: Et maintenant, quoi? Il y a des améliorations a apporter, mais comme je n'en ai pas besoin personnellement, c'est pas très motivant : - Ajouter un mode azimutal (c'est pas simple) - Ajouter une calibration a 2 points pour corriger une erreur de mise en station - Ajouter la réfraction atmosphérique (lié au mode AZ en fait) - Améliorer le serveur web pour la config - Ajouter d'autres modes wifi (pour l'instant j'ai juste le mode Alpaca) - Ajouter un capteur 3 axes pour pouvoir faire un home et un démarrage plus simple. Cyrille
-
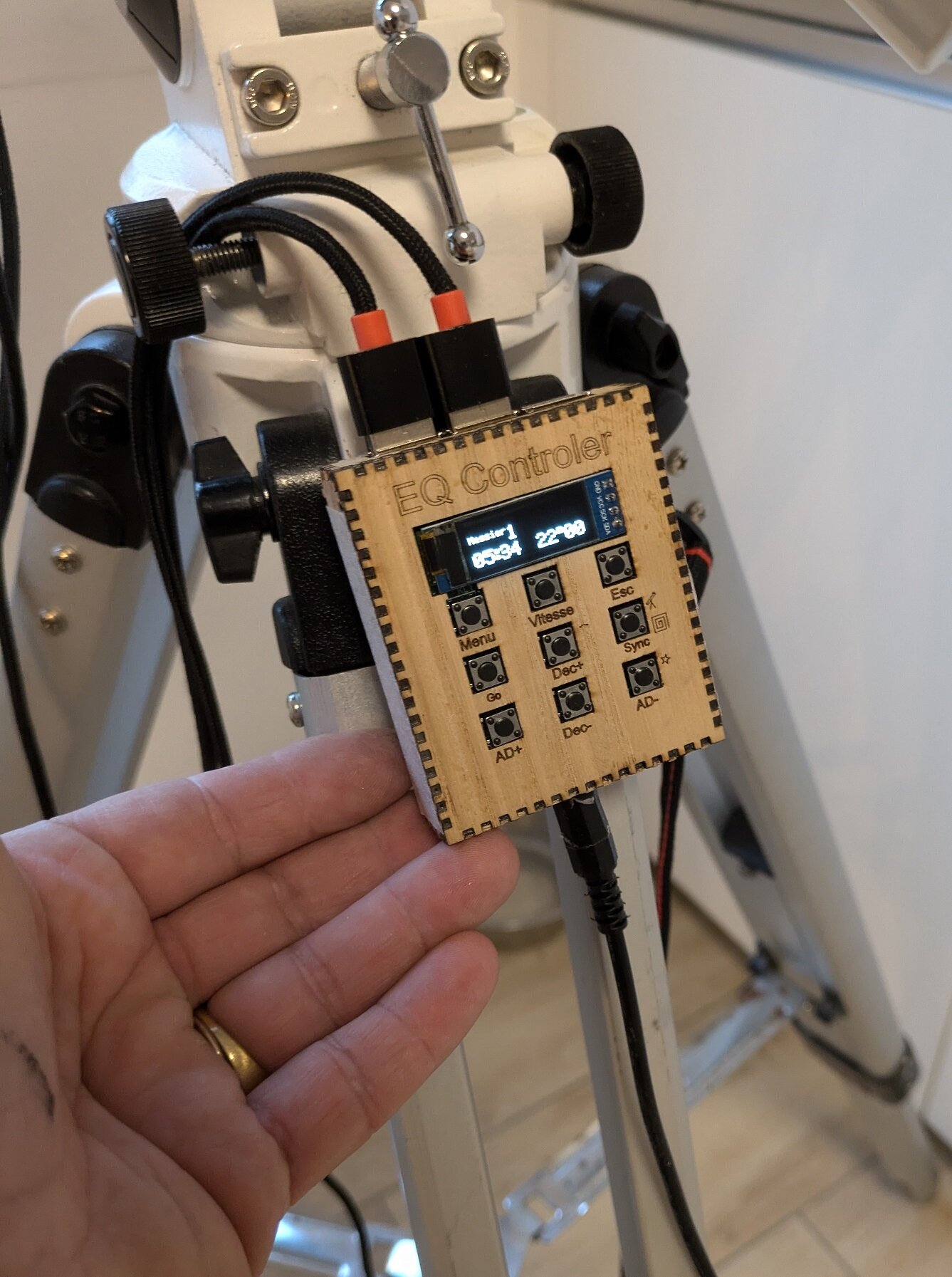
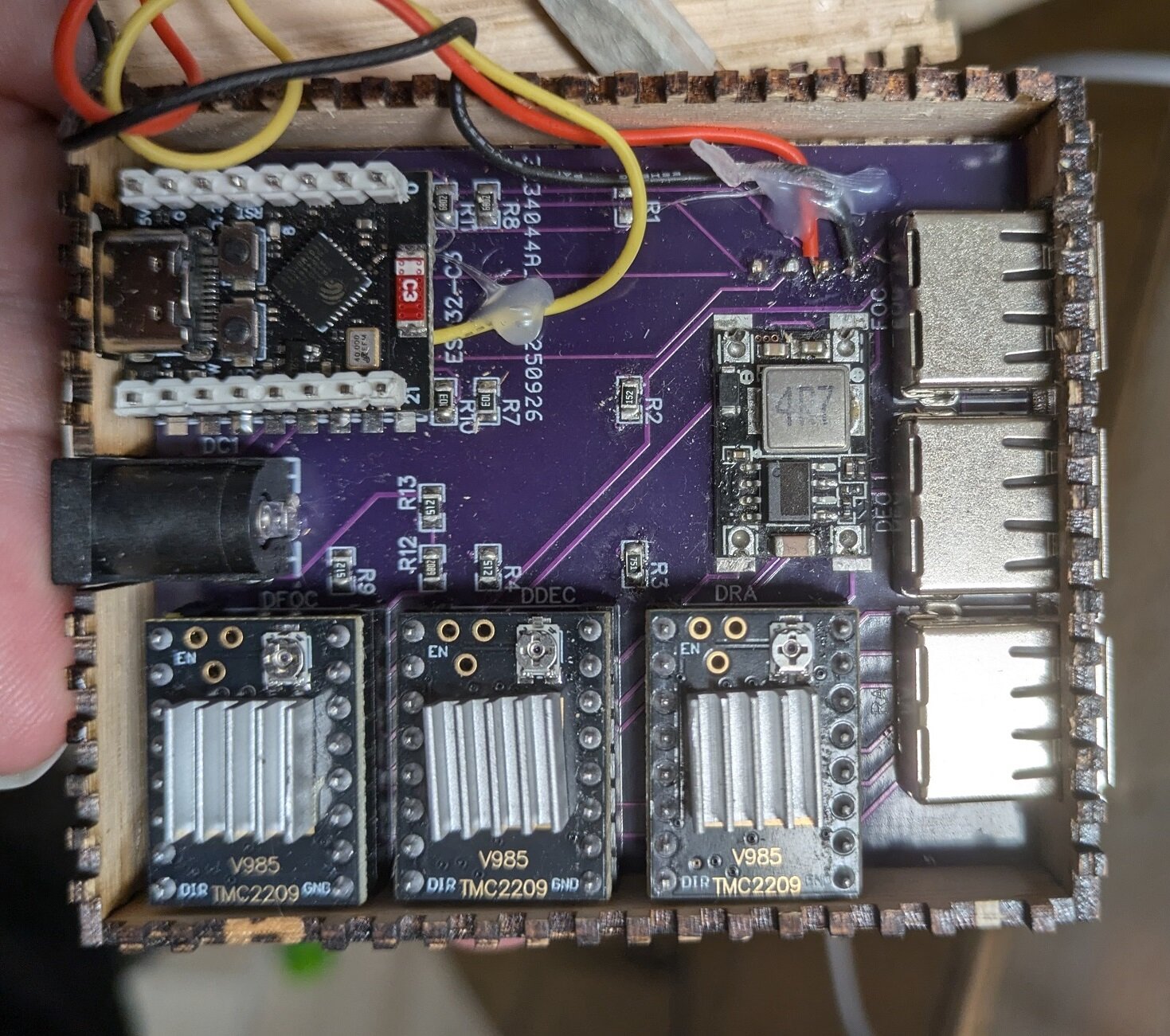
Salut, > Je coince quand-même énormément sur les connecteurs usb Que veut tu dire par la? (réele curiositée de ma part). Est ce que tu pense que c'est une mauvaise solution technique (pourquoi?) Ou est ce que par ce que ca fait bizare? Pense tu que c'est dangereux? (car ca prète a confusion?) > j'aurais pas osé Ben moi si 😄 En fait comme les connecteurs sont généralement connécté une fois à la mise en place et plus touchés, et comme c'est de socket, pas des connecteurs cotés "device", je n'ai jamais eu la moindre hesitation quant a leur utilisation... meme de nuit.. mais bon comme c'est moi qui ai fait le truc, c'est un peut normal... Et puis il y a le cout. J'ai acheté un pack de 20 cables USB pour moins de 10 e. J'ai coupé la partie 'device' et soudé la connectique nema17... (j'ai fait 7 modèles de ce controleur, pour moi, mes club astro et des potes) Notons que certaine versions avait, sur le devant 2 "vrais" port USB en plus! Mais j'ai laissé tombé car ca ne marchais pas bien. Cyrille
-
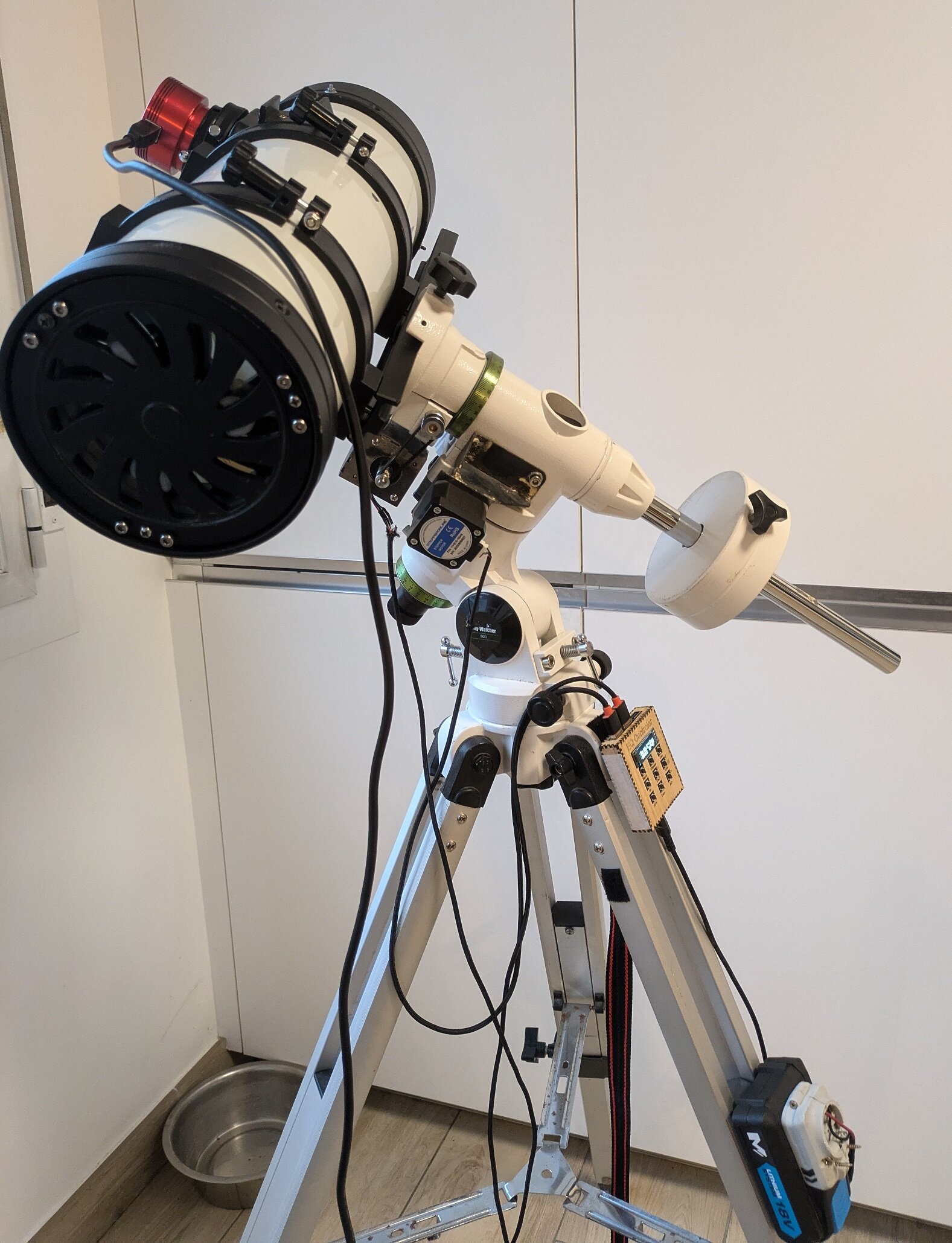
Bonjour, Je viens de publier la première version de mon contrôleur pour montures équatoriales... https://github.com/Cyrille-de-Brebisson/eq_control/tree/main Bon, vous me direz, il y a déjà One-Step, et Teen-Astro, alors POURQUOI? Déja car quand j'ai commencé a travailler dessus je ne connaissait pas ces 2 produits 🙂 Ensuite car j'avais un but différent : 1) Simplicité et bas prix 2) Utilisation manuelle + via Ascom Le résultat est un boitier unique qui fait tout, très compact, 6x7x1.7cm (en gros, la taille d'un savon, mais moins glissant!) Control 2 axes montures plus control focus, Ascom, Alpaca En mode non connecté au PC il permet de faire le suivit et le goto sur environ 700 objets et planetes... En mode connecté au PC il ouvre toutes les possibiliées classiques de guidage, sync, goto... Coté connectique, j'utilise des prises USB car c'est super répandu, et peut cher. Alim 9-24V. USB ou wifi pour la connection PC. J'ai testé et utilisé sur EQ3, EQ5 (et equivalent comme la GP)... Cyrille