Mala
-
Compteur de contenus
99 -
Inscription
-
Dernière visite
-
Jours gagnés
1
1 abonné

Visiteurs récents du profil
4186 visualisations du profil

Mala's Achievements
-

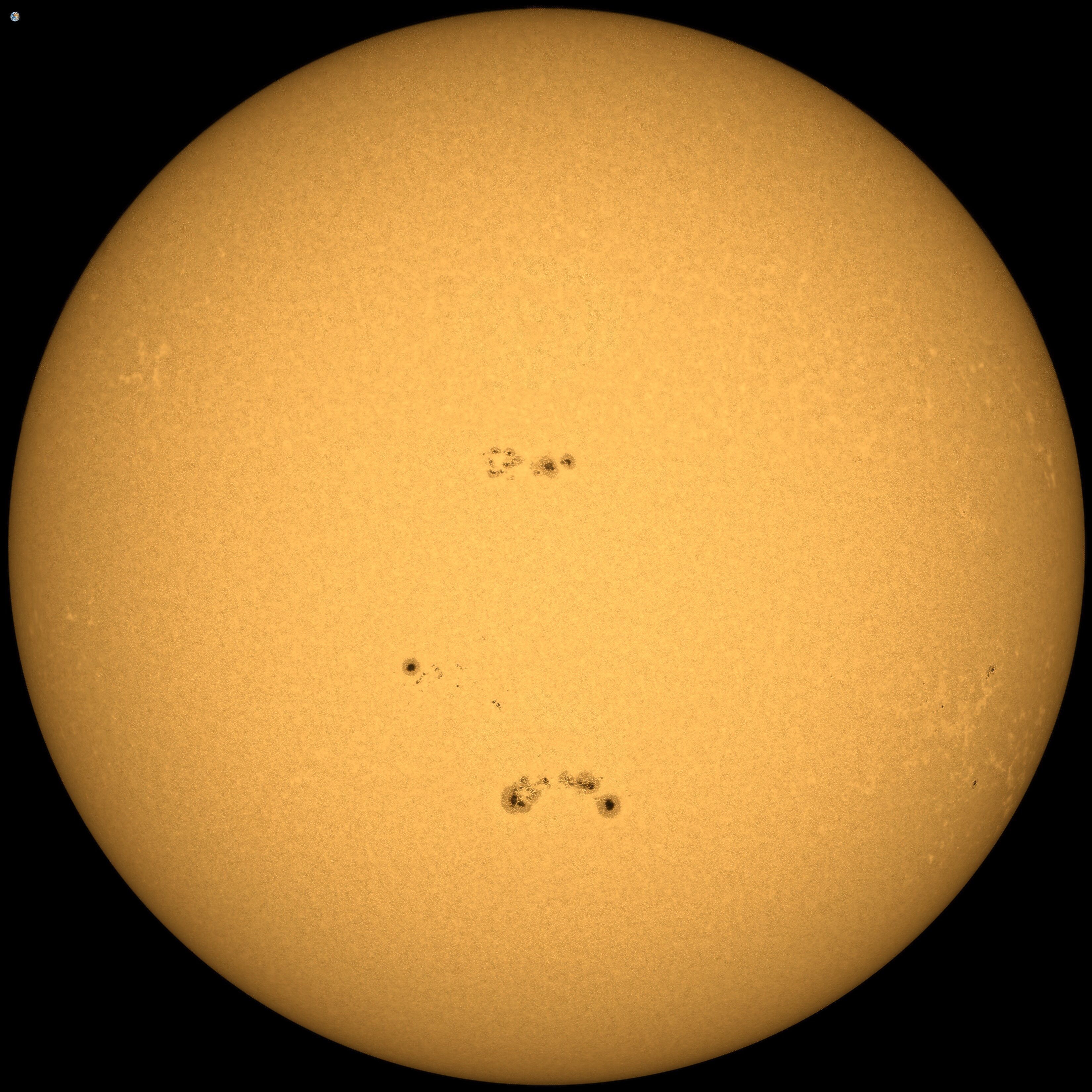
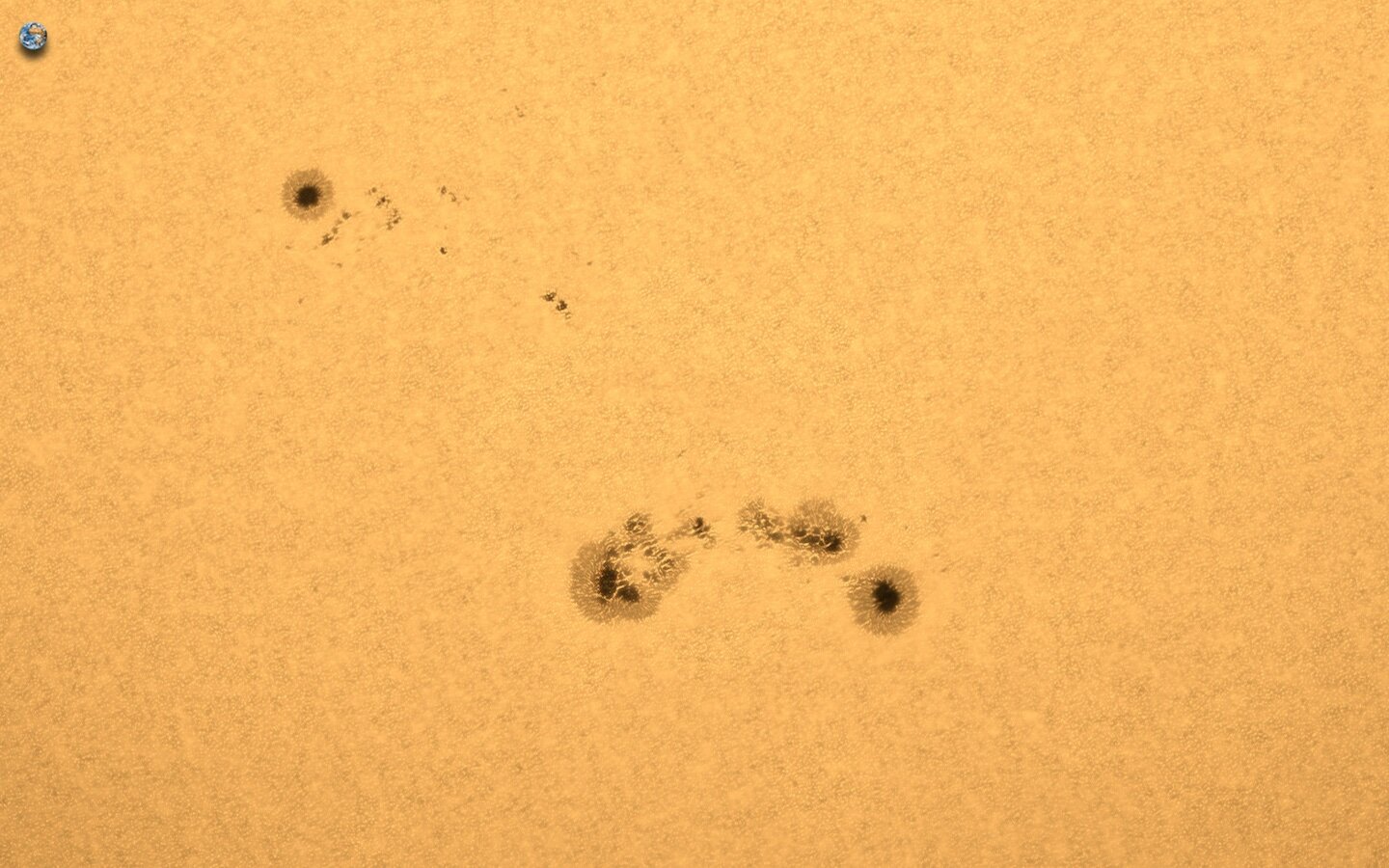
Soleil du 17 Juin - Canon EF 500 F/4,5 - ASI678MC
Mala a répondu à un sujet de Mala dans Astrophotographie
Merci Seb. -
Voilà, l'hiver est enfin terminé ! Je range mes moufles. Oh, le soleil est de retour... 😁 Canon EF 500 F/4,5 + Extender 1,4x + filtre Astrosolar grade 3,8 + Filtre Baader Continuum 7,5nm + ASI 678MC AR-3712 et AR-3713 lundi 17 Juin 2024. On est peu de chose quand on les compare à la Terre... 🫣 Bon ciel à tous. On dirait que c'est pas gagné cette année avec les voiles d'altitude!

-
Calcul position planètes: code d'exemple C/C++ optimisé arduino
Mala a répondu à un sujet de HPMâd dans Les bricoleurs
Aucun intérêt d'utiliser une carte SD: coût, lenteur, câblage et lourdeur de codage supplémentaire. Pour une réalisation perso pas cher, le mieux est de partir sur un Arduino Mega pour les raisons déjà évoquées par @keymlinux. De même VSOP87 est largement suffisant pour du pointage. Le problème n'est pas la précision de la méthode de calcul en soit, c'est plus l'optimisation de la précision des calculs pour processeur 8bits. Perso, après divers tests, j'avais opté pour une carte d'imprimante 3D compatible Mega (Type MKS) à l'époque. Pour 40€, on a une carte avec drivers de moteur pas à pas intégré et accès à toutes les goodies du monde Arduino. Après si on veut vraiment partir sur un Arduino de base c'est un choix. Encore faut-il s'assurer qu'il dispose d'un vrai quartz pour la précision du pilotage. Et là bien souvent ça part en cacahouète. Le supplice du sèche cheveux est infaillible si on a le moindre doute sur une chinoiserie... https://www.em10-usd-arduino-takahashi.eliotis.com/blog/index_files/controler-la-frequence-d-un-arduino.html -
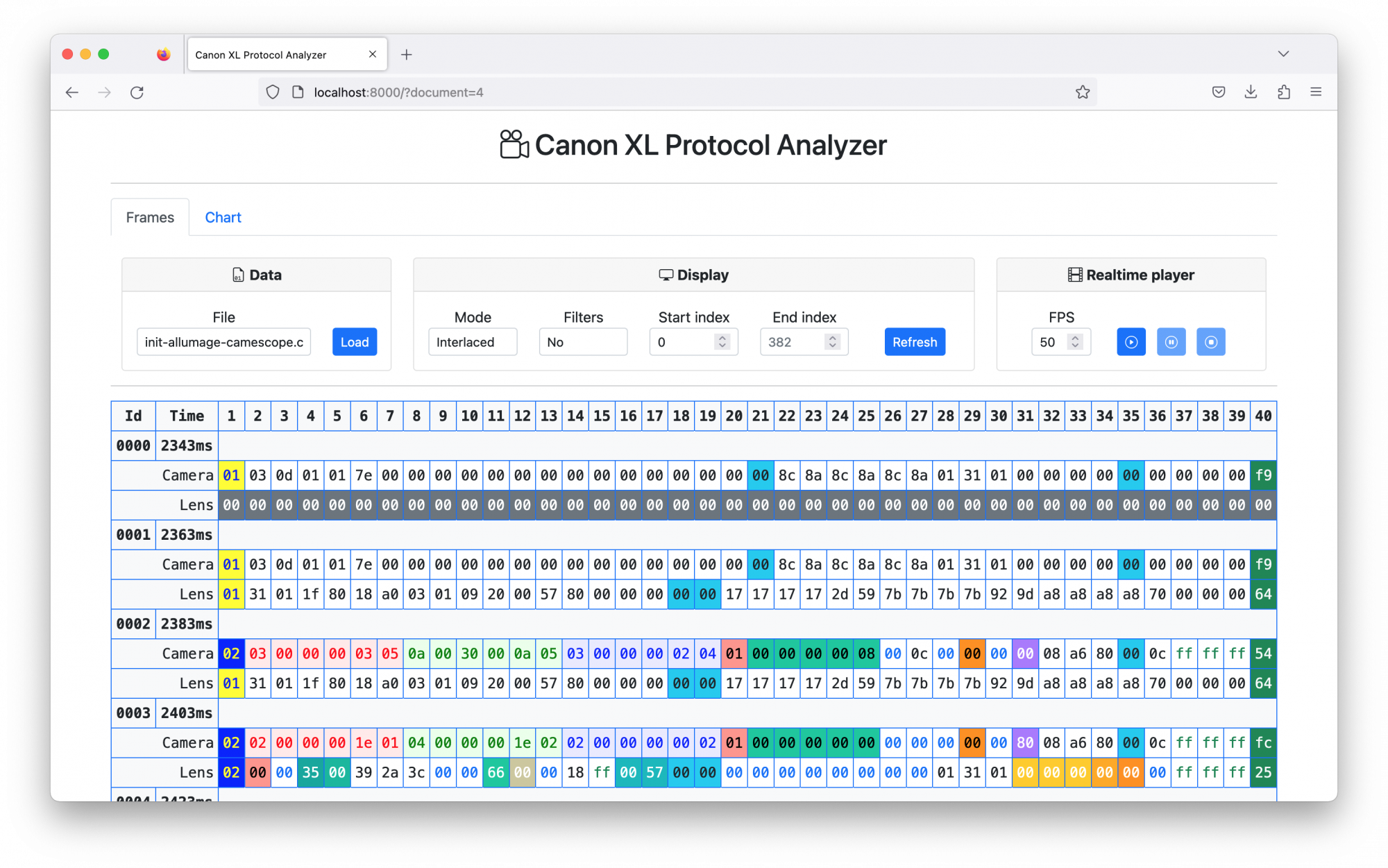
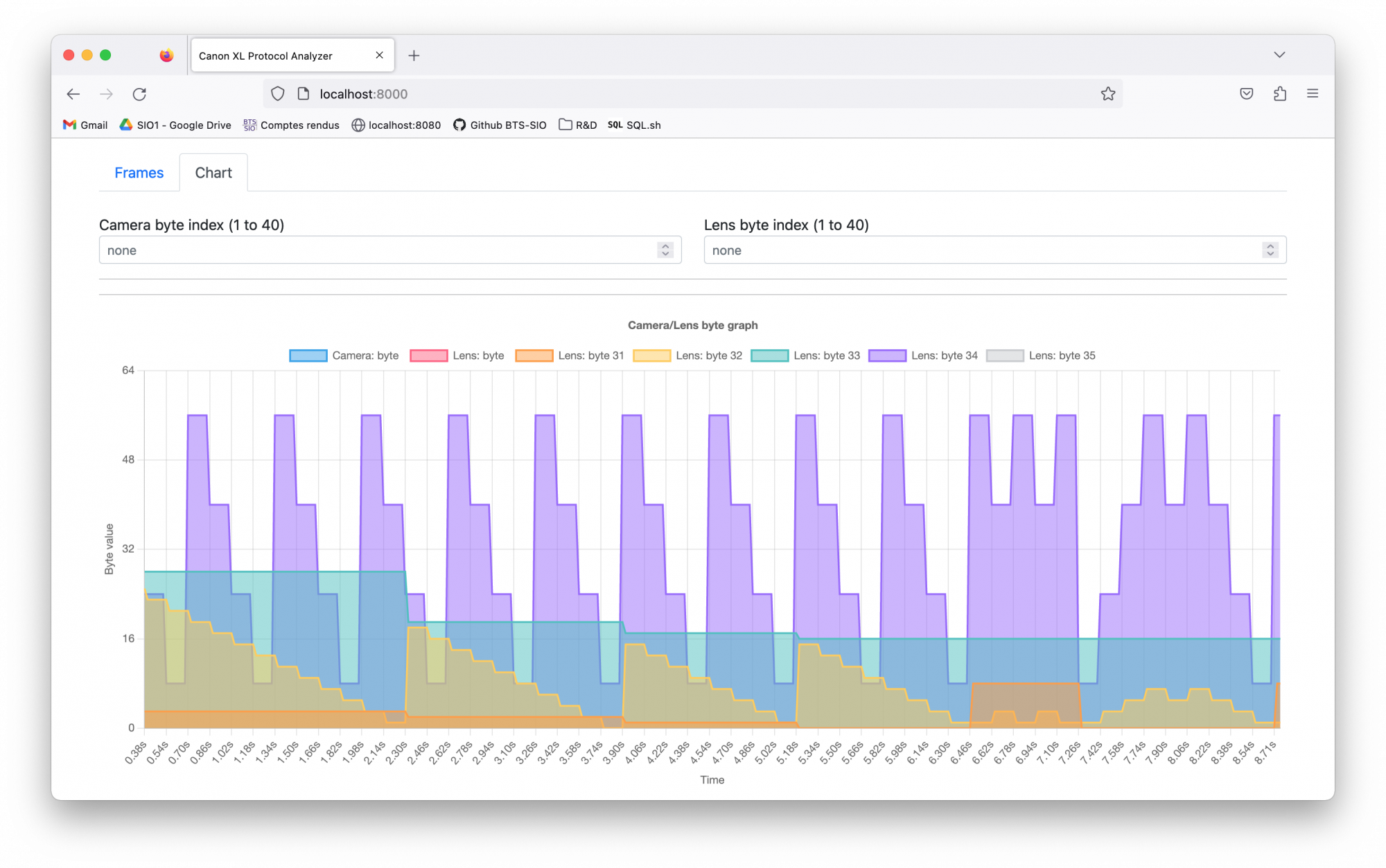
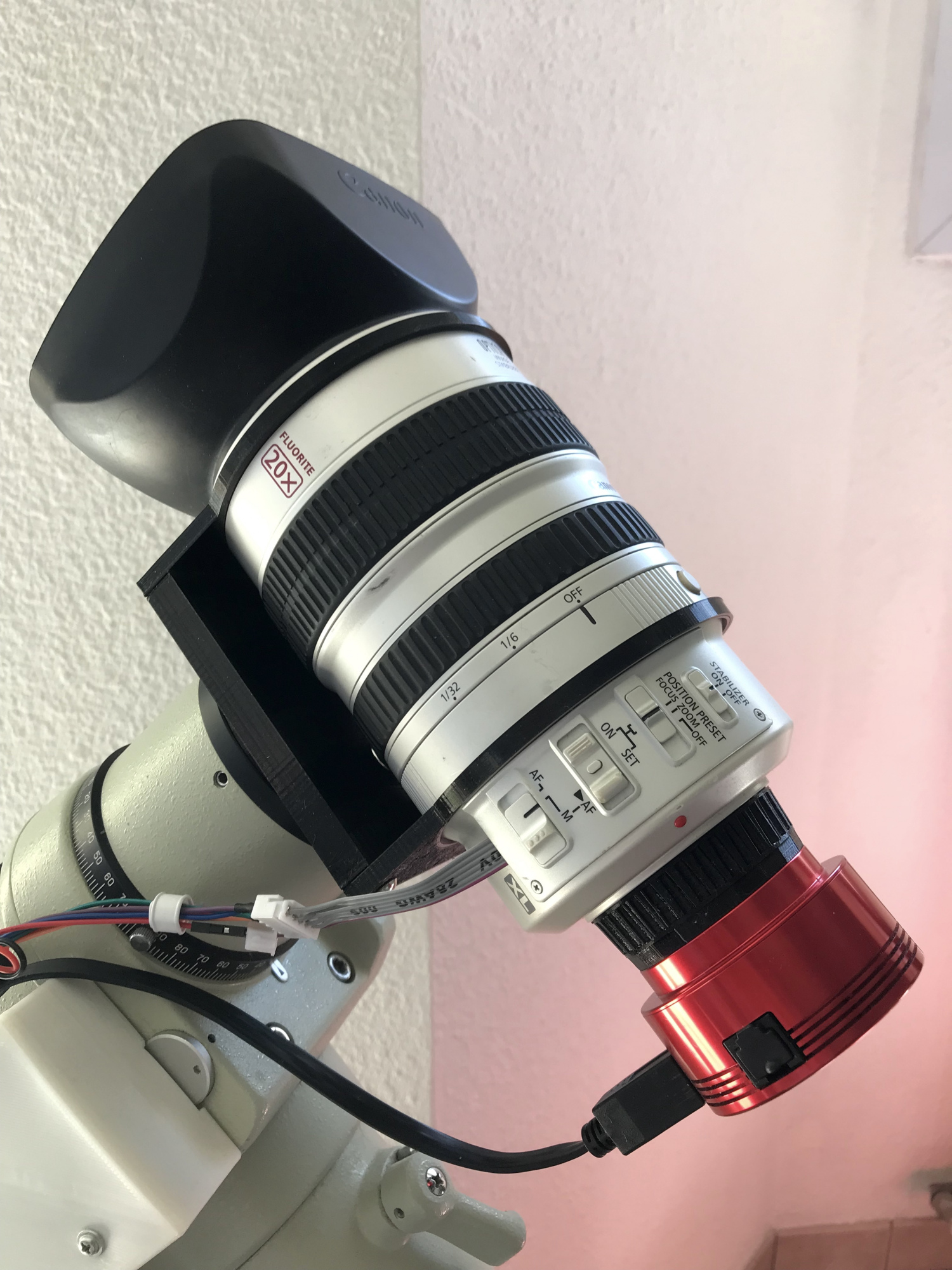
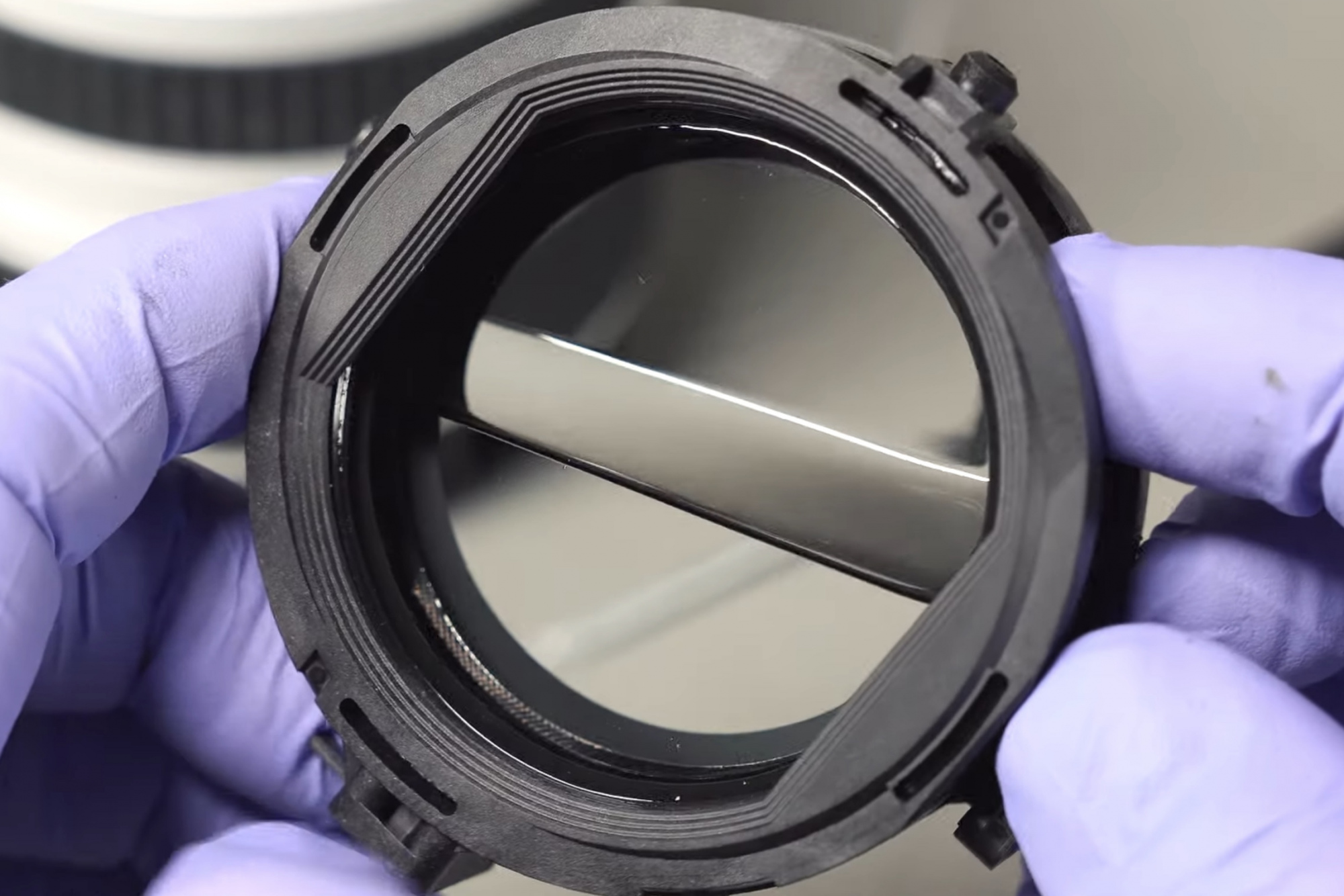
Pas très actif depuis un bout de temps mais je me remets à la bricole doucement. Dernière aventure en date via le boncoin.fr, je suis tombé par hasard il y a quelque temps sur un caillou un peu particulier: Objectif Zoom Canon XL 20x 5,4-108 mm L IS 1,6-3,5 estampillé "fluorite" pour 50€! Je me suis dit que je ne prenais pas trop de risques à faire joujou avec. Le hic, c'est que les XL sont utilisables exclusivement sur les caméscopes XL1 et XL2 commercialisés à la fin des années 90 / début des années 2000. Ces objectifs haut de gamme sont en effet entièrement numériques. Et pour couronner le tout, pour protéger les capteurs triCCD du caméscope, leur diaphragme est fermé au repos contrairement aux objectifs reflex de la marque. Pour contrôler le diaphragme, le zoom, la mise au point, etc, il faut donc reprendre la main sur le caméscope en termes de communication si l'on veut utiliser ces objectifs pour un autre usage. Bref, blablabla, hack de la communication SPI entre un objectif 16x et un XL1 de récup... Blablabla, reverse engineering du protocole, blablabla pas simple... Blablabla, conception d'une bague adaptée pour l'ASI 290 (backfocus de seulement 29mm et baïonnette non standard EF)... Blablabla, hack via un arduino nano et alimentation externe... Blablabla, ça commence à tomber en marche... Blablabla, conception d'une platine pour l'EM-10... Blablabla, premiers essais sur notre satellite... A ce stade, je contrôle: L'ouverture du diaphragme via le PC. La mise au point manuelle via la bague. Le zoom manuel via la bague et via le PC. La stabilisation qui est également pilotable via le PC. Ces optiques ont un champ image réduit étant conçues à la base pour un capteur 1/3". Le cercle image utile est seulement d'environ 6,64mm de diamètre après mesure. Par contre elles disposent d'une belle plage focale et d'une grande ouverture. A voir question coma et chromatisme en stellaire. Je n'ai pas pu pousser les tests avec la météo capricieuse. Concernant la stabilisation, ces optiques disposent d'un système qui me semble assez original puisqu'elles utilisent un concept de "prisme liquide"... De là à imaginer les dissocier sur des optiques de récup pour en faire un AO7 amélioré ou encore un correcteur de champ atmosphérique ça vaudrait le coup de tenter. Surtout si on est en mesure d'asservir la position via le PC... Je vous laisse apprécier la vélocité et la précision de positionnement de la stab. C'est assez bluffant. Merci de m'avoir lu et bon ciel.
- 19 réponses
-
- 11
-

-