
soulearth
-
Compteur de contenus
355 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Messages posté(e)s par soulearth
-
-
Bonjour,
Superbe image.
Je me pose justement la question la "compatibilité" de topaz Denoise et/ou topaz Gigapixel derrière un traitement Startools.
Avez vous comparé les deux ? Topaze Denoise arrive t'il a nettoyer plus que ce qu'a pu faire Startools ?
Bien cordialement,
Soulearth
-
Merci messieurs. Je vais suivre vos conseils et aussi rchau, regarder ton lien. Le système de débrayage m'intéresse au plus au point et je ne doute pas que le reste me sera très utile.
-
La référence de 40hz c'est très intéressant. Effectivement y'a plus qu'à maintenant.
Enfin il va falloir que je déploie tous mes talents de menuiserie qui sont encore plus inexistant que mes talents en électronique. Encore pas mal de problème a résoudre en perspective.
-
Bien sur, ca depend de la roue. Mais mon telescope m'impose un secteur qui sera d'un diametre d'environ 60cm de rayon. Pour etre dans les clous, il va me falloir une toute petite roue. Ca serait pas simple.
-
Très honnêtement l'option du moteur EQ1 avec remplacement du circuit électronique par un convertisseur DC-DC 9V pour réguler la tension et ensuite derrière un PWM pour régler la vitesse à également été étudiée. Et franchement ça pourrait le faire aussi je pense.
J'ai étudiée un peu les deux systèmes et ce qui est en train de me faire pencher pour le pas à pas c'est :- le fait que d’après les infos tirées sur internet la vitesse la plus basse de l'EQ1 c'est 1T/25min, soit 0.04T/min et que moi en prenant en compte la réduction de 33x du couple secteur/galet moteur, il me faudrait une vitesse de 0.023T/min (15°/1h -> 0.25°/min -> 0.25/360 x 33coef_reduction = 0.023t/min ). /!\ Eq1 trop rapide /!\
- le coté prédictible du moteur pas à pas si je me plante pas dans mes calculs
- la facilité de stopper le moteur une fois en bout de course sans le couper électriquement ( car j'ai besoin de l’électricité pour le faire reculer )
-
Bonjour,
Je me suis lancé dans le projet de fabriquer une table équatoriale mais j'aurai bien besoin d'aide car je découvre totalement les moteurs pas à pas et c'est dur.
## Version courte du problème ##
Après recherches il ressort que la solution conseillée est le trio arduino + driver a4988 + moteur pas à pas.
J'ai vérifié la fréquence de base du PWM d'un Arduino ( sans diviseur ) et c'est autour de 500Hz. Sur internet toujours j'ai lu que 450Hz c'était déjà beaucoup pour un moteur pas à pas, donc tous allait pour le mieux. Ça semblait cohérent.
Je cherche donc le moteur de mes rêves, en demandant quelques informations du genre la fréquence max, et voila la docs technique :
https://www.omc-stepperonline.com/download/17HS19-1684S-PG100_Torque_Curve.pdf
Le documents indique 500Hz pour 1RPM et jusqu’à 5000Hz pour 8RPM. Incohérence total!!! A priori 400Hz c’était déjà beaucoup et la c'est présenté comme le minimum. Et alors le maximum de 5000Hz !!
Je ne comprends pas. Pouvez-vous m'aider ?## Version longue ##
Après recherches il ressort que la solution conseillé est le trio arduino + driver a4988 + moteur pas à pas.
J'ai vérifié la fréquence de base du PWM d'un Arduino ( sans diviseur ) et c'est autour de 500Hz. Sur internet toujours j'ai lu que 450Hz c'était déjà beaucoup pour un moteur pas à pas, donc tous allait pour le mieux. Ça semblait cohérent.
Calcul détaillé :
La terre tourne environ à 15.041"/s. C'est donc la vitesse que doit avoir ma table.
Pour que les pas ne soit pas visible à l'oculaire, il faut qu'ils soient assez petit. A priori, la limite se situe à 1"/s ce qui correspond à la précision maximum que nous impose l’atmosphère à cause de la turbulence.
De ce fait, en 1s la plateforme doit avoir un déplacement de 15.041" par pas de 1". Le calcul est donc pas trop compliqué il me faut 15.041 pas en sortie de "chaine d'entrainement" .
Donc 15.041 pas en 1s. Avec des pas de 1".
Si je ne me trompe pas, Fréquence_moteur = Nb_pas_parcouru / 1s. Donc Fréquence_moteur = 15.041 / 1s = 15.041Hz.
Fréquence_moteur = 15.041 HzJe poursuit donc sur mon calcul de réduction.
Je part sur un moteur pas à pas classique de 200 pas. Soit 1.8° par pas, soit 1.8 x 3600 en second d'arc.
Vitesse_Table = Vitesse_moteur / coef_reduction
Soit 15.041Hz x 1"/s = 15.041 x 1.8 x 3600 x 1/coef_reduction
Coef_reduction = 6480.
Bon j'ai ma fréquence, mes vitesses, mon coef de réduction, je suis le plus heureux des hommes. A priori 6480 de réduction c'est énorme mais j'ai les micros-pas sous diminuer la vitesse et donc la réduction d'autant.
Je cherche donc le moteur de mes rêves, en demandant quelques informations du genre la fréquence max, et voila la docs technique :
https://www.omc-stepperonline.com/download/17HS19-1684S-PG100_Torque_Curve.pdf
Le documents indique 500Hz pour 1RPM et jusqu’à 5000Hz pour 8RPM. Incohérence total!!! A priori 400Hz c’était déjà beaucoup et la c'est présenté comme le minimum. Et alors le maximum de 5000Hz !!
Je ne comprends pas. Pouvez-vous m'aider ?Vous l'aurez compris, j'ai quand même potassé le sujet, fait des calculs dans tous les sens, tué quelques bloc note, mais la je bute totalement. Entre 500Hz et 5000Hz pour une vitesse considérée comme haute, il y a un facteur de 10x. Je ne peux pas laisser une erreur potentielle de x10 se balader comme ca. Et comme j’apprends au fur et à mesure que je découvre, il n'est pas impossible qu'il y ai des erreurs de logique, de math, de compréhension, etc ...
Merci d'avance à tous ceux qui tenteront de me sortir de ce mauvais pas
")
-
Bonjour Fred.
Merci pour ce retour. Pour le CG du rocker je pense que je vais essayer de le mettre en équilibre couché a l'horizontale sur par exemple une planche verticale d' 1 cm d'épaisseur... A faire a plusieurs bien sûr a plusieurs afin d'éviter toute catastrophe.
-
Bonjour,
L'idée de me construire une table équatoriale pour mon dobson Kepker 254/1250 me trotte dans la tête depuis très longtemps et j'ai décidé de m'y remettre disons sérieusement.
J'ai donc pas mal potassé le sujet et écumé les différents site internet. Je me lance dans la construction d'un modèle comme celui la : http://rmi.free.fr/Astro/table_equatoriale.htm
Pour toutes les tables équatoriales, le centre de gravité du dobson est un élément important qui affectera la précision du suivi si j'ai bien compris.
Je viens donc solliciter votre aide pour m'aider à calculer au plus juste le centre de graviter de télescope, car je suis comme qui dirais pas sur de mon coup.
Voici les éléments techniques:
Le tube fait 17kg
La base fait 17 kg
L’extérieur du tube à un diamètre de 304mm
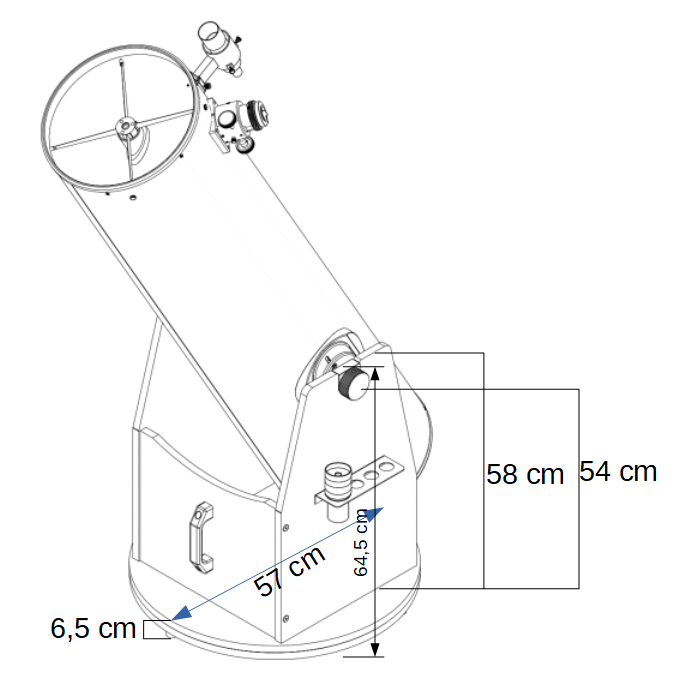
Voici une image du dobson avec les cotes ajoutés:

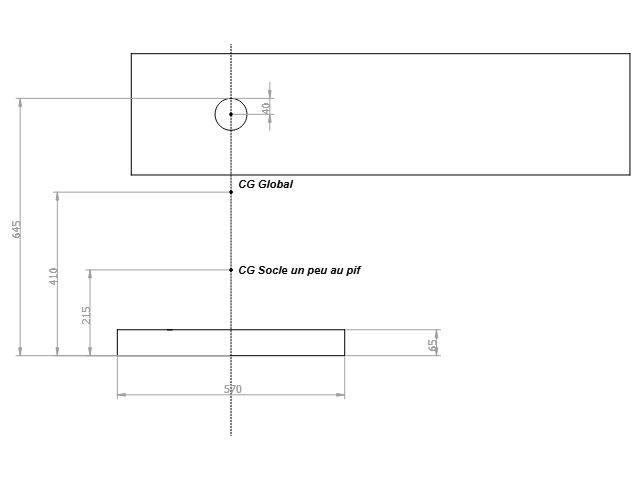
Schéma de l'ensemble :
Comme vous pouvez le voir, la base n'est pas totalement cubique et je n'ai pas l'ensemble des cotes, sur le schéma j'ai donc uniquement dessiné les plateaux rotatifs.
Voici ma méthode de calcul qui demande à être critiquée, modifiée, améliorée ou confirmée :
Le plateau au sol et le plateau rotatif étant certainement les éléments les plus lourds du socle, je fais l'hypothese que le centre de gravité du socle n'est pas totalement au milieu mais plutot à 1/3 en partant du bas. Je sais, c'est du pifomètre total, j'aimerai d'ailleurs affiner cette valeur mais comment ....
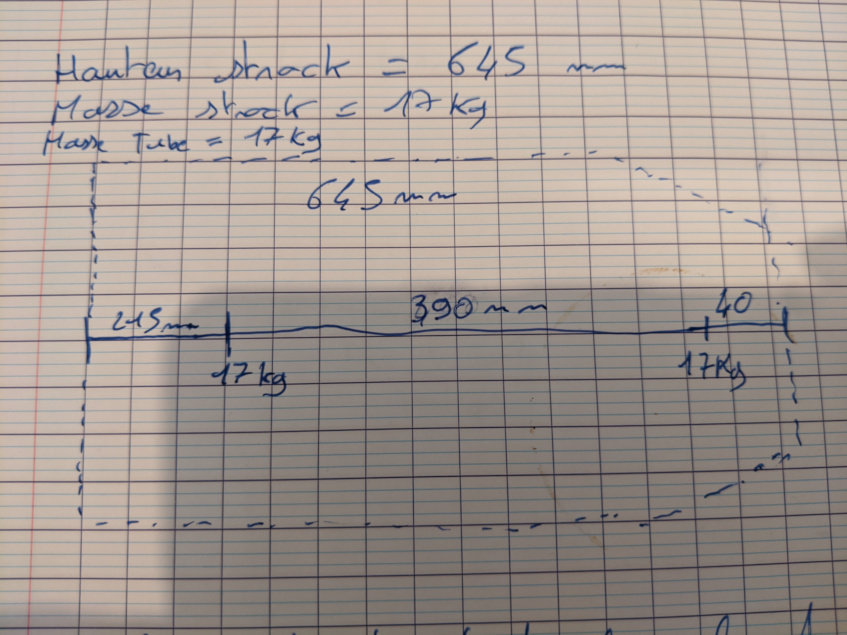
Le socle fait 645mm de haut. 645 x 1/3 = 215. Le centre de gravité du socle est donc pifométriquement à 215mm de hauteur.
Le diamètre de la roue d'altitude du tube est de 80mm avec en son centre le centre de gravité du tube qui se situe donc à 40mm du haut du socle.
Ci-dessous un schéma à main levé du socle à l’horizontal.
Donc nous avons :
CG du socle à 215mm du bas
CG du tube à 40mm du haut
Et le tube et le socle qui font tous deux 17kg.
Le CG de l'ensemble devrait donc etre exactement au milieu de ces deux points.
645-40-215=390
390/2 + 215 = 410
J'estime le CG de l'ensemble à 410mm de hauteur. Qu'en pensez-vous ? Me suis-je totalement planté ?
Merci d'avance pour votre aide.
-
Merci pour cette réponse rapide. Donc si j'ai du bol ça va aller tout seul. Sinon faut que je trouve cette fameuse platine ? Ça s'appelle comment exactement platine femelle queue d'aronde ?
Je peux abuser et vous demander un lien ?
Merci beaucoup pour votre aide.
-
Bonjour.
J'ai moi aussi pour projet de me bricoler une petite lunette. Et bien sûr la question de la monture arrive assez vite. Vous êtes parti sur un trépied Amazon ( ça m'irai bien comme solution ). Par contre, comment fixez vous la queue d'aronde au trépied photo ? Vous avez utilisez un adaptateur ?
Merci d'avance a celui qui m'éclairera.
Cordialement.
-
Bonjour.
Quelqu'un aurait le lien pour que je puisse télécharger les plans 3d de l'adapteur ? J'en aurai besoin moi aussi pour me mettre a la VA.
Merci d'avance
-
Bonjour,
Le Club d'astronomie de l'Observatoire des Sauvages (CAOS) participera comme chaque année à la nuit des étoiles.
Le vendredi et le samedi 10 et 11 août, nous vous convions donc à la nuit tombée pour une observation à travers notre télescope pour admirer, étoiles, nébuleuses , galaxies et planètes.
Pour situer, nous sommes à environ 1h00 de Lyon en voiture.
Bien sur, la soirée sera annulée en cas de ciel couvert.
Pour plus d'informations, vous pouvez vous renseigner sur le site : http://www.caos.clubastro.free.fr
Cordialement,
-
Le modèle Takahashi à l'air pas mal en effet. Après, sauf erreur de ma part, il n'a pas la partie réfléchissante à 45 degré. Est-ce un problème ? C'est peu être plus simple quand elle est présente ?
-
J'ai un dobson kepler 250mm. Je peux t'affirmer que penser à la taille de l'engin pour le transport est primordial. Cas pratique :
Le tube du 250mm tient pile-poile sur la banquette de ma 307 pijo.
La base du 250mm tient dans le coffre en enlevant la plage, et j'ai de la place a coté pour mettre carte du ciel, vêtements chauds, chaussures, thermos, sac de couchage, etc ... (je sais, ma voiture c'est un peu ma seconde maison).
J'ai aussi pu tester dans une clio 2 et miracle, le tube tient au chausse pied sur la banquette mais niveau coffre c'est pas la même, il reste quand même moins de place. Il me semble que j'avais utilisé le siège avant passager pour mettre des trucs dessus.
Tout ca pour dire qu'acheter un 300mm ou plus, c'est soit avoir un utilitaire, soit aimer plier les sièges à chaque sortie nécessitant de prendre la voiture.
-
Merci pour vos retours. Je vais retenter au 400mm + filtre. Vous me conseillez UHC ou OIII pour cette cible? Dernière question, au 24mm panoptic, je peux voir m52 et la bulle dans le meme champ ou ca sort? Il me semble que ca sort, mais dans le doute je demande. Peux etre que le grossissement n'est pas suffisant par contre ?
Merci bruno pour NGC 7538, ca sera pour la prochaine obs.
-
bonjour a tous.
hier, le ciel etait parfais, j'en ai donc profité pour observer. tout ce passait bien jusqu'a la nébuleuse de la bulle. j'avais a disposition un 250mm et un 400mm et un pano 24, un nagler 13, un nagler 9 et un filtre uhc. A chaque fois, pas de problème je trouve m52, mais impossible de trouver la nebuleuse de la bulle, meme en comparant des photos avec ce que j'avais a l'oculaire pour verifier que j'etais dans la bonne zone grace aux etoiles. Alors question la nebuleuse de la bulle est elle visible et avec quelles condition et materiel. Dois-je perceverer ou arreter les recherches?
merci d'avance pour vos conseils
-
Bonjour a tous,
Tu peux me mettre dans les peux être. Ca me tente énormément mais je sais pas encore comment seront posé les congés dans ma boite.
-
Merci pour l'info. J'achèterais celle ci si mon frère n'arrive pas a me ramener la bague orion d'angleterre ( il y ai pour ses étude). Je lui ai demandé de me la prendre car elle est dispo sur certain site anglais. a+
-
J'ai demandé chez OU, il ne la font pas et ne peuvent pas me la commander, dommage. Je l'achèterais peu être sur le site hollandais mais le frais de port est pas donné et si possible autant faire bosser une boutique française. En tout cas merci pour l'info.
-
Cartouche le "Orion Precision Centering Adapter" a l'air très bien et m'interresse beaucoup. Je possede aussi un laser de colim, et les jeux sont flagrant. Par contre vous avez une idée pour l'acheter car sur le site d'orion ils vente aux US et canada seulement ....
-
J'ai une bonne piste pour lancer coelix sous linux. Effectivement avec wine ca plante, par contre avec crossover ( version amélioré et commercial de wine ), ca semble fonctionner. En tout cas il se lance.
Je laisse le soin aux personnes connaissant coelix de tester la demo de crossover (dispo à cette adresse : http://www.codeweavers.com/products/ ) et dire si il n'y a aucun dysfonctionnement dans l'utilisation.
C'est une chose que je ne peux pas faire car j'ai pas de windows pour comparer et j'ai juste cherché car j'aime autant le monde linux que l'astronomie alors ca occupe mes journées ce genre de problème. Après coelix je l'ai jamais utilisé.
a+
PS: Je vous previens ca marche, mais ca rame un peu ( surtout sur mon pauvre athlon 3200 + )...
-
Ne tombons pas dans une gueguerre nord/sud. On va pas se la jouer, les gars de la montagne qui parlent pas au gars de la vallée.
J'espère que nous pourrons tous passer de bons moments d'astro ensemble.
A bientôt
-
Mdr, cette histoire de nord/Sud. Ca parait idiot, mais c'est vrai qu'entre Vienne et Villefranche-sur-Saône il y a deja 63km. D'ou peut être l'utilité de deux fils. Disons que pour des obs régulières, c'est pas mal que ca soit pas trop loin non plus ( faut pas que ca deviennent des missions commando d'aller observer).
Après pour un truc genre super regroupement Nord + Sud, plus ponctuel, ca sera avec un grand plaisir que je viendrais, meme si pour cela je dois faire plus d'une heure de route.
Bien entendu, nous pourrons poster les RDV dans les deux fil, comme ca tout le monde est tenu courant.
-
Oui sincèrement je pense pas que ce soit pour ce week end, il annonce mauvais ou mauvais.
Fixation Quickfinder sur Newton
dans Matériel général
Posté
Bonjour.
Je remet une pièce car cette question m'en amène une autre. Existe t-il des modèles de chercheur point rouge de qualité qui se fixe sur un base de chercheur classique ? Par qualité j'entends pas de viseur a la mire plus lumineuse que la lune. Pas de truc plein de jeu, etc ( je suis sur que vous voyez ).
Merci pour votre aide.