HPMâd
-
Compteur de contenus
283 -
Inscription
-
Dernière visite
-
Jours gagnés
3
6 abonnés

HPMâd's Achievements
-
Très joli travail! Bravo
-
Bonjour, le Club d'Astronomie de Mars organise sa star party annuelle le WE du 7 Aout. Cette star party se déroule sur le site de l'observatoire Hubert Reeves, dans le Parc Naturel Régional des Monts d’Ardèche à une altitude de 1080 m. Un horizon dégagé à 360° et dépourvu de toute pollution lumineuse! Les repas y compris le petit déjeuner et les apéros sont fournis par le CAM et pris en commun! Vous n'avez qu'a profiter! Pour s'inscrire, envoyez un email a clubmarsastro@gmail.com avec le sujet "3 nuits sur Mars" Les instructions pour le payement sont dispo ici: https://www.clubastromars.org/animations/3-nuits-sur-mars-2026#h.tha7bo229ctd Cyrille
-
- 2
-

-

-
Bonjour, Serrurier, à l'époque n'avais pas de tubes carbones, pas d'autocad, faisait des telescopes beaucoup plus lourd, d'ou son "invention"... Les materiaux et techniques modernes, et le fait que vous avez une colimation motorisée (et donc asservissable, SharpCap est capabe de le faire, via script) rend la création d'un "Serrurier" inutile de nos jours 🙂 Je pense que votre architecture est 100% appropriée! Du super boulot. Cyrille
-
Bonjour, Superbe! Beau boulot. Je viens de finir un truc pratiquement identique, mais pour du 150 🙂 donc je peux aprécier le boulot! > Mark Serrurier serait sûrement content de voir un tube comme ça. Ben non... Un télescope Serrurier est un telescope a longerons (comme celui ci), mais ou les longerons sont calculés pour que leur deflection de chaque coté du point d'attache soit identique, permetant de garder la colimation et les réglages a toute altitude. Ce n'est pas le cas ici... car le point de pivot en altitude n'est pas sur "la boite", et les longerons ont des longeurs differentes, mais pas des diamètres different. Cyrille
-
Pas mal, mais bon, celui qui est capable de prendre ce Kit et de faire une monture est capable d'acheter les composant sur AliExpress et de faire le tout tout seul 🙂 pour moins cher! Cyrille
-
Besoin de conseil façonnage d'un petit miroir de 150mm
HPMâd a répondu à un sujet de LouisLeGros dans Les bricoleurs
Bonjour, >La meilleure solution c'est de faire un outil en platre de 150 mm par moulage sur le mirroir huilé >tu enroule une dizaine de tours de scotch autour, et tu colle ensuite sur l'outil des petits carreaux de ceramique genre mosaique collage araldite Je ne me suis meme pas tant fait chier que ca... J'ai acheté un "carreau" de "petit carreaux". Ca viens en 30*30cm, avec des carreaux de 1.5*15, liés avec un filtre derrière. Coupez pour que ca fasse un rond de 150, posez sur le miroir, scotch de peinture autour, 3/4 tours, et coulez le platre dirrectement... Cyrille -
Besoin de conseil façonnage d'un petit miroir de 150mm
HPMâd a répondu à un sujet de LouisLeGros dans Les bricoleurs
Bonjour, Je suis passé par là.... 1: comprenez bien que plus la focale est courte, plus la parabolisation est difficile! Il y a une puissance 2 qui traine. Donc passer de F8 a F5 sera environ 3 fois plus difficile. 2: Faire un miroir est un peux comme de la cuisine, il y a "un tour de main". Qui est difficile a apprendre tout seul "pétrire la pâte jusqu'a ce que la consistance soir correcte" se traduit en "On sent quand la lubrification et le travail est effectif"... Sans une personne experimentée à coté, c'est dur! 3: Perso, j'ai travaillé avec des outils a 60% en platre. Dans votre cas, comme vous avez déja une sphère, mais pas les outils qui vont avec, ca sera peut être le plus facile. 4: Pensez à l'aluminure. Il faut compter un peut plus d'1€/mm de diamètre. Donc au moins 150€. Pour ce prix la vous achetez un 150f5 tout neuf... Si vous avez du temps et que vous aimez les défit, ou si votre but est de gagner de l'experience pour faire un miroir plus gros (ou si vous avez access a un club avec une cloche a vide, il doit en rester 2 en france), alors allez y, c'est une super experience. Si votre but est de sauver des sous, courrez dans l'autre sens 🙂 Autant que possible trouvez une autre personne qui puisse vous aider, quite a aller lui rendre visite! Cyrille -
Demande de confirmation du pas de la vis de focus sur C8 EDGE (projet de focuser DIY)
HPMâd a répondu à un sujet de Ameleo37 dans Les bricoleurs
Bonjour, Les DRV8825 sont contrôlés analogiquement et "une fois pour toute" pour la puissance, et nécessitent entre 2 et 3 pin de controle par chip. Les TMC2209 peuvent être contrôlés digitalement pour la puissance, et peuvent etre contrôlés par 1 seule pin dédié a un chip + 1 pin partagée entre 4 contrôleurs. Il est donc possible de contrôler 4 drivers avec 5 pins, au lieu de 12 pour les DRV... le DRV2209 peuvent avoir jusqu’à 256 micros pas (au lieu de 32 un *8 en précision!) et sont beaucoup plus silentieux (pas super important). Le DRV peut gérer plus de courant, mais c'est pas le facteur principal pour moi. Au final: - Le contrôle "puissance" du TMC permet de réduire la puissance consommée en mode "on ne bouge pas". Dans ma https://github.com/Cyrille-de-Brebisson/eq_control par exempla, pour réduire la consommation et pouvoir tourner sur une petite batterie USB, j'eteind le driver du focuser une fois le focus atteind (je ne travaille qu'en pas entier ici). Et lorsque le focuser marche, j'eteind le moteur RA... - Le contrôle de puissance permet de faire un homing sur un focus. Diminuer la puissance de contrôle, aller dans un sens "assez longtemps" pour être sur d'arriver à la maison... remettre la puissance au normal. J'utilise maintenant des ESP32-C3 super mini, avec moins de pin IO que le Nano, donc le nombre faible de pin de controle est très important! J'ai beaucoup travaillé avec le Nano, mais avec les ESP, il n'y a plus aucun intéret, c'est pas moins cher et c'est beaucoup moins puissant. Pour ce qui est de la conso mémoire, tout dépend. En dessous le code que j'utilise (fait par moi même), il doit prendre moins d'1KB sur le nano (celle la est une version esp32 avec du soft serial... donc pas méchant... C'est sur que les libraires "standard" ne sont généralement pas sympa à ce niveau. class Ctmc2209 { public: static uint16_t const tmc2209Delay= 8; // 8micro s = 125Kb/s = 12.5KB/s = 1.6millis for a read/modify/write of a register... Trying 500kb/s did not work... static void inline udelay(int i) { delayMicroseconds(i); } uint8_t serialPin; static uint8_t const GCONFAdr= 0; static uint8_t const CHOPCONFAdr= 0x6C; static uint8_t const IHOLD_IRUNAdr= 0x10; uint8_t GCONF[8], CHOPCONF[8]; Ctmc2209(uint8_t serialPin😞 serialPin(serialPin) { static uint8_t const IGCONF[8]= { 5, 255, GCONFAdr|0x80, 0, 0, 1, 0b11000001 }; memcpy(GCONF, IGCONF, 8); // GCONF.pdn_disable=1, GCONF.mstep_reg_select = 1 (use MRES for step count) static uint8_t const ICHOPCONF[8]= { 5, 255, CHOPCONFAdr|0x80, 0x33, 0x00, 0x00, 0x53 }; memcpy(CHOPCONF, ICHOPCONF, 8); // TOFF=3, microsteps=8(0), INTPOL=1, HSTRT= 5, DBL=0, double edge off (because we can do up/down in 1 function) CGPIO::output((1<<serialPin)); CGPIO::set(serialPin,1); } void sendRegs() { sendPacket(GCONF, 8); sendPacket(CHOPCONF, 8); } static uint8_t swuart_calcCRC(uint8_t const * s, uint8_t l) { uint8_t crc= 0; // CRC located in last byte of message do { uint8_t currentByte = *s++; // Retrieve a byte to be sent from Array for (uint8_t j=0; j<8; j++) { if ((crc>>7) ^ (currentByte&0x01)) crc= (crc<<1) ^ 0x07; else crc= crc<<1; currentByte>>= 1; } } while (--l!=0); return crc; } // send packet. Will calculate the checksum for you. size/s has to be the full packet lenght (with crc) // Assumes that line is high before and output mode void sendPacket(uint8_t *s, uint8_t size, int addr=3) // send 1 packet to 1 address... { s[1]= addr; s[size-1]= swuart_calcCRC(s, size-1); do { // send size bytes uint8_t v= *s++; portDISABLE_INTERRUPTS(); // noInterrupts(); // Time sensitive CGPIO::set(serialPin, 0); udelay(tmc2209Delay); // start bit for (uint8_t i= 0; i<8; i++) { CGPIO::set(serialPin, v&1); udelay(tmc2209Delay); v>>=1; } CGPIO::set(serialPin, 1); udelay(tmc2209Delay); // stop bit portENABLE_INTERRUPTS(); // interrupts(); } while (--size!=0); } void TOFF(uint8_t val) // update CHOPCONF.TOFF 0:stop stepper, 3:start stepper { CHOPCONF[6]= (CHOPCONF[6]&~15)|val; sendPacket(CHOPCONF, 8); } // 0=256microsteps, 1:128, ..., 7:2, 8:1 (no microsteps) void microsteps(uint8_t val) // update CHOPCONF.MRES { CHOPCONF[3]= (CHOPCONF[3]&~15)|val; sendPacket(CHOPCONF, 8); } void shaft(uint8_t dir) // update GCONF.shaft 0:direction 1, 1:direction 0 { GCONF[6]= (GCONF[6]&~8)|(dir<<3); sendPacket(GCONF, 8); } // 0=256microsteps, 1:128, ..., 7:2, 8:1 (no microsteps) void setPower(uint32_t val) // change register x10 (power control) { uint8_t power[8]= { 5, 0, 0x10|0x80, 0, uint8_t(val>>16), uint8_t(val>>8), uint8_t(val), 0 }; sendPacket(power, 8); } }; -
Demande de confirmation du pas de la vis de focus sur C8 EDGE (projet de focuser DIY)
HPMâd a répondu à un sujet de Ameleo37 dans Les bricoleurs
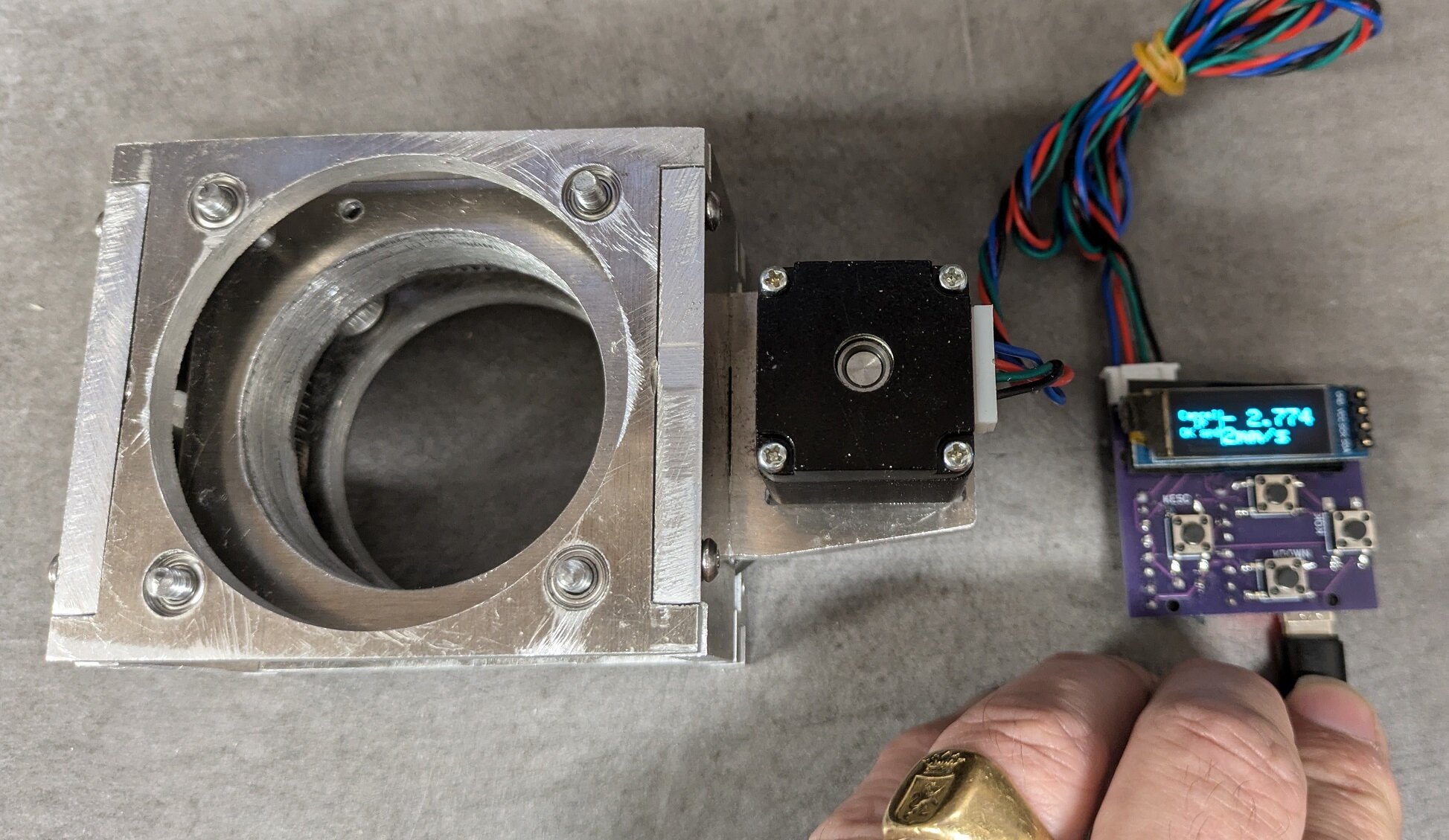
Les nema 17 ont l'avantage d'etre TRES peut cher et d'avoir pas mal de couple. Mais ils font 43mm. Les nema 14 (comme dans la photo), sont environ 2 fois plus cher, ont moins de couple, mais sont plus petit a 28mm. Il faut voir la difference entre un nema17 "plat" (20mm) qui coute 6€ pour 14n/cm de couple, et un nema11 de 34mm qui coute 10€ pour seulement 7n/cm de couple... J'avais un pb d'encombrement pour le PO ci dessus. D'ou mon choix d'un nema11. Mais sinon, j'aurais pris un nema17! Cyrille -
Demande de confirmation du pas de la vis de focus sur C8 EDGE (projet de focuser DIY)
HPMâd a répondu à un sujet de Ameleo37 dans Les bricoleurs
Salut, J'avais pas mis la repo en public 🙂 Maintenant, c'est fait! https://github.com/Cyrille-de-Brebisson/One_Motor_Focuser Pour les moteurs d'imprimante, méfie toi et vérifie la resistance. Si c'est des moteurs basse resistance (sous les 10ohms), pas de problème, mais certaines utilisent des moteurs haute resistance (genre 30ohms) qui demandent des haut voltages (24, 30V)... L'avantage de mon système c'est qu'il marche en 5V, donc juste une connection USB 🙂 Cyrille
-
Pied semi permanent DIY - besoin de critiquer la solution
HPMâd a répondu à un sujet de thelover3 dans Les bricoleurs
Ha les filles ha les filles 🙂 Mais si tu coule ton béton comme un socle (genre 50*50*10cm d'épaisseur) et un cylindre (20cm*100cm), ca fait aux alentours de 150kg... c'est déplassable avec 2/3 copains (en le faisant rouler par example) si besoin est.. Cyrille -
Demande de confirmation du pas de la vis de focus sur C8 EDGE (projet de focuser DIY)
HPMâd a répondu à un sujet de Ameleo37 dans Les bricoleurs
Voila le lien vers le projet. J'ai des PCB en rab si tu veux... https://github.com/Cyrille-de-Brebisson/One_Motor_Focuser -
Demande de confirmation du pas de la vis de focus sur C8 EDGE (projet de focuser DIY)
HPMâd a répondu à un sujet de Ameleo37 dans Les bricoleurs
Salut, 90% des softs d'astro travaillent en pas, pas en distance pour le focus. Connaitre le ratio pas vs distance est donc secondaire dans 90% du cas. En F/D10, tu a tellement de marge de focus que normalement tu n'auras aucun problème de "précision" de ton système de focus. C'est la bonne nouvelle. Il en découle que tu n'a pas besoin de travailler en micros pas sur ton moteur pas à pas! C'est "important" car le couple varie en fonction du nombre de micros pas, et les moteurs ont un "bloquage" naturel "sur les pas". Donc, si tu est en "pas plein", arrivé à destination, tu peux "couper" le moteur et sauver de la puissance sur ton setup, surtout si tu est nomade 🙂 Pour la partie électronique. Si tu n'as pas déja un truc, j'ai des PCB qui controlent 1 moteur pas à pas, avec un control par ordi (Ascom), et 4 touches pour un controle manuel si sa t'intéresse... Il faut qu eje publie le truc d'ailleur! Cyrille -
Pied semi permanent DIY - besoin de critiquer la solution
HPMâd a répondu à un sujet de thelover3 dans Les bricoleurs
Salut, Si c'est chez toi, pourquoi pas un pied béton? Pas que ta solution soit mauvaise, mais un pied béton sera probablement moins cher, et certainement moins de travail 🙂 Cyrille -
Sytème de collimation automatisée - Mirrotation
HPMâd a répondu à un sujet de Agenax dans Les bricoleurs
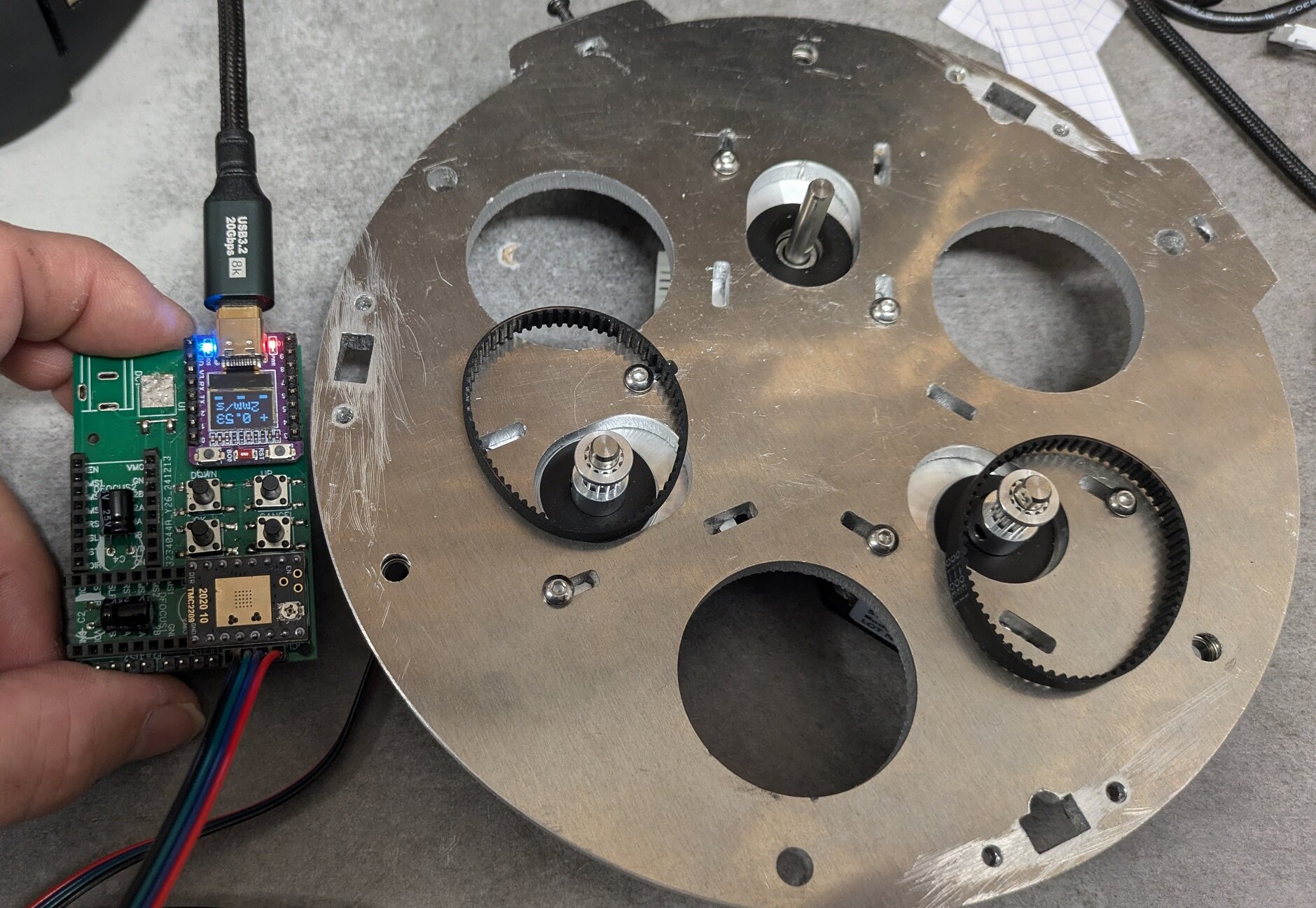
Salut, Splendide boulot! J'ai justement fini hier un système similaire pour un astrographe que je suis en train de faire! Bon, j'ai pas mis le control de résistance chauffante, mais j'ai la partie control de 3 moteurs (qui sont en prise directe). A la lecture de ton post, il semble que toute la partie HW/FW marche bien, c'est vraiement la partie app PC/Android qui est problématique? Comme mon utilisation est astrophoto, je pensais utiliser sharpcap (via Ascom) pour faire cette partie. Sharpcap à un module (experimental) de mesure de la décolimation et permet, vias scripts, d'agir sur des systems ascom. Cela m'évitera une grosse partie des problèmes que tu semble avoir. Peut être pourais tu faire la meme chose? Quand j'aurais compris comment ca marche (si!), je pourais te refiller ce que j'ai trouvé. En tout cas joli! Cyrille