Astrokor
-
Compteur de contenus
430 -
Inscription
-
Dernière visite
-
Jours gagnés
5
Tout ce qui a été posté par Astrokor
-
Bonjour Je pense sérieusement à revoir légèrement ma copie pour le choix du rapport de réduction avec quelques hypothèses : - on choisit un moteur pas à pas "standard" de 200 pas/tour (1.8° de résolution) . Avec un µ-stepping de 128 µ-pas/pas moteur , ça nous donne 25600 µ-pas par tour. Je pense que beaucoup de drivers ont ce mode disponible, le mien l'a et ne coûte pas cher. - on choisit un rapport de réduction de 1:22.5 (au lieu de 1:20 actuellement), - on fait l'hypothèse qu'on a 2 réducteurs en cascade, ça nous donne un ratio de 1/22.5 x 1/22.5 = 1:506.25 (contre 1:400 aujourd'hui) La résolution totale donne : - 360° --> 360x60x60 = 1 296 000 arc-sec - résolution = 1 296 000/(506.25x25600) = 0.1 arc-sec / µ-pas Il faudrait seulement rajouter 5 dents au réducteur pour atteindre ce but "théorique", ça me parait pas mal. On parle de résolution, pas de précision évidemment, la précision c'est pas du tout le même ordre de grandeur ; si on obtient quelques arc-min on sera content. des avis ?
-
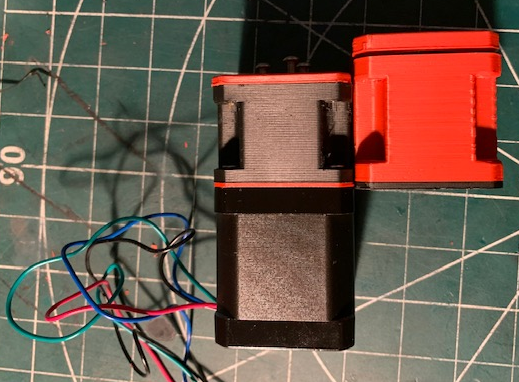
Bonsoir, Bonnes nouvelles, la V2.0 marche très bien, plus de backlash du tout. Il fait 32 mm de long et est donc plus court de 11 mm par rapport à la V1.0. (voir photo) J'ai commandé un rouleau de NinjaTek - Armadillo (TPU 75D) pour la flexspline . Une bien plus grande dureté : l'espoir est de réduire à presque à zéro l'angle de torsion sur le moyeu de sortie. Si j'y parviens, je posterai toutes infos nécessaires pour le fabriquer si vous êtes toujours intéressés. Question : faut-il tenter d'augmenter le rapport de réduction ou bien reste comme ça ?

-
cette version a un ratio 1:20, mais on pourrait en empiler deux pour un ratio 1:400. Le TPU est une matière extra de mon point de vue, c'est extrêmement solide, mais ça s'imprime à 20 mm/s, 250°C pour la buse et 70°c pour le plateau. Il vaut mieux avoir un extrudeur direct drive sinon c'est compliqué vu que c'est très souple. on peut annuler complètement le backlash, il faut arriver à peaufiner suffisamment les profils de dentures, j'ai parfaitement réussi sur le gros 1:100 que j'ai déjà fait
-
Salut du jeu, je vais même en ajouter un peu. C'est pour pouvoir guider la pièce en rotation ( "la charge utile" ) qui se montera dessus je vais modifier cette partie aussi Je prépare une V2.0 qui intègre tous les commentaires pertinents Attendez un peu avant de faire chauffer vos imprimantes, la V2.0 sera plus compacte et mieux aboutie (vue en coupe ci-dessous) merci pour la question
-
J'ai acheté chez Gamvert quelques mètres de fil plastique (Nylon) qu'on utilise pour les débroussailleuses. Il fait 1.7 mm de diamètre contre 1.75 normalement. Je suis en train de tester l'impression : plateau à 55°C et buse à 250°C, j'ai un peu augmenté le débit d'impression. Pour l'instant ça marche et ça se décolle pas du plateau ! C'est moins cher que le Nylon sur 3D Jake ! haha, ce serait rigolo si ça marche pour notre application !
-
En réfléchissant, ça rendrait la flexspline beaucoup moins flexible à cet endroit là. je ne crois pas que ce soit meilleur au final, mais tu peux essayer ... Ce que tu peux essayer en revanche c'est imprimer des pièces en nylon, toi qui peux
-
Salut J'y avais pensé, c'est une option possible, mais la couronne extérieure (bague extérieure) permet de mieux répartir les forces sur la flex-spline que les billes qui auraient seulement un contact ponctuel. Mais ça devrait marcher aussi. Faudrait tester. je le ferai surement. Pour que ça marche bien, la partie plate au fond de la Flex-spline doit être le plus rigide possible. J'ai testé d'autres concepts, c'était moins bien, voire ça marchait pas du tout. Pour 3 vis au lien de 5, ça doit être possible, mais j'ai préféré prendre ceinture et bretelles quand j'ai conçu le réducteur. Mais c'est à tester. Tu auras peut être de meilleures idées que moi Après pour ce qui est des courroies crantées, je ne suis pas fan. Et le profil de denture est "imposé" et donc est pas forcément adéquat. Si tu fais une conception du profil de denture, tu verras que c'est une partie critique pour que ça marche. Donc je préfère avec ce degré de liberté. On doit pouvoir le faire. La raison du design actuel, c'est que je voulais mettre deux roulements au départ, et finalement j'en ai trouvé qu'un seul dans mon stock. Plutôt que de toute refaire, j'ai comblé le "vide" avec cette pièce, qui permet aussi de positionner le moteur et le centrer (les trous des vis ne sont assez précis pour ça. La réponse est oui sûrement on peut le faire. J'ai fait la pièce avec des fonctions de symétrie, juste pour me simplifier la vie. La réponse est oui tu peux le faire, ça suffirait en effet, mais ça change pas grand chose au résultat. Exact, c'est pour que ça se démonte facilement. Tu peux faire autrement si tu veux. l'important est que cette partie soit très rigide. Sinon, il y a un angle de torsion non négligeable en sortie. Les inserts à monter au fer à souder, c'est très bien pour les couvercles où il n'y a pas d'efforts dessus. Dès que tu mets des efforts répétés, ça tient pas dans la durée, ça s'arrache. J'ai souvent fait cette expérience. J'ai donc préféré prendre des inserts taraudés avec un grand épaulement. Je ne changerai pas ce point design personnellement. C'est exact en effet, je sais. J'y ai pensé mais au final, j'a pas voulu bousiller un stepper pour ça Oui on peut certainement faire plus compact encore. Il y a une limite, c'est la longueur de la flex-spline, tu ne peux pas la faire plus courte que le design actuel car elle deviendrait trop rigide et prendrait trop d'efforts, et avec "trop d'angle" lié à la déformation, ça coincerait je pense. Si tu regardes les "vrais" réducteurs harmoniques en métal, la longueur de la flexspline est un vrai sujet, on ne peut pas la réduire indéfiniment. Il vaudrait mieux plutôt essayer de la rallonger un peu de quelques mm, ce serait mieux je pense, et l'épaissir un peu si c'est possible. J'ai une question à mon tour, tu comptes utiliser ce design et l'améliorer ? Si c'est le cas, je peux t'envoyer le *.STEP du projet. A toi de me dire.
-
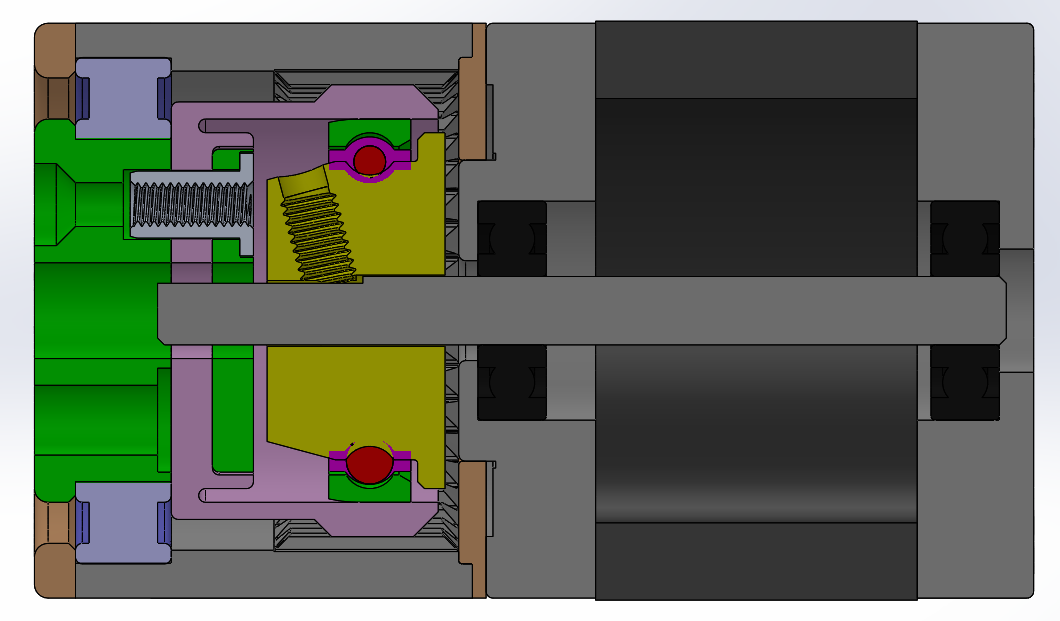
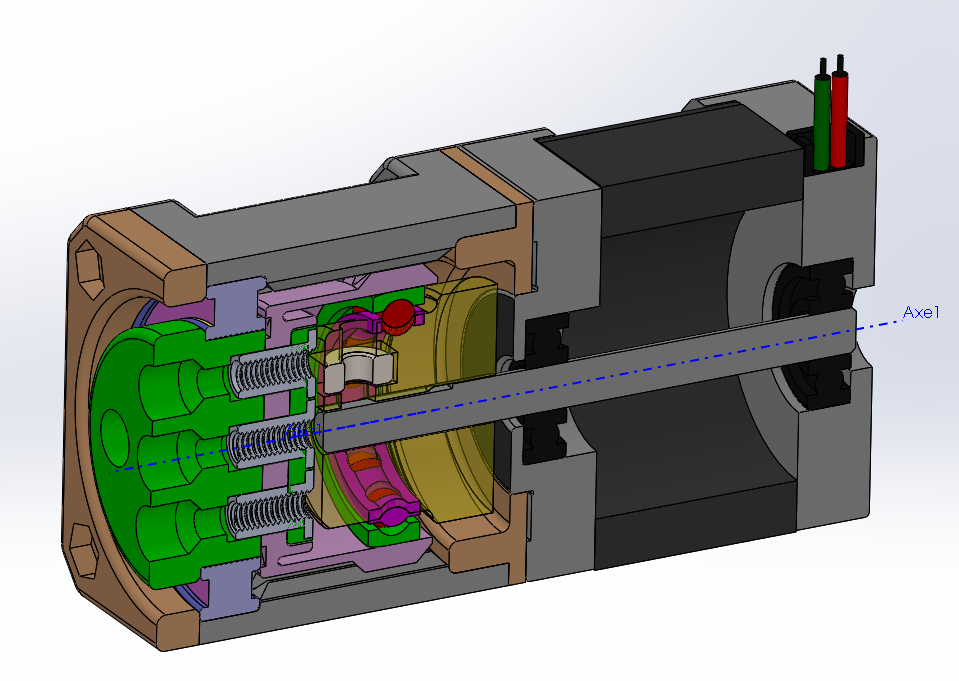
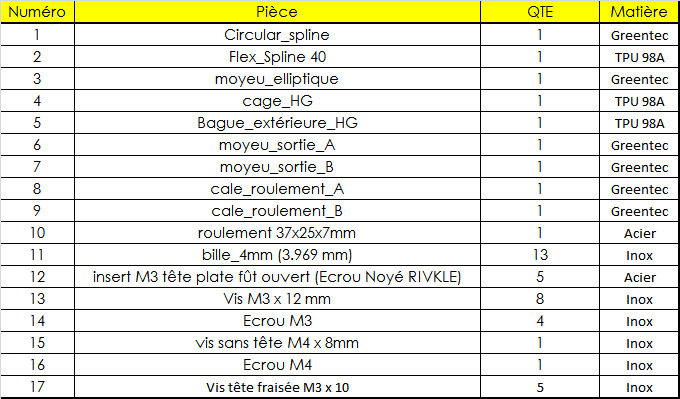
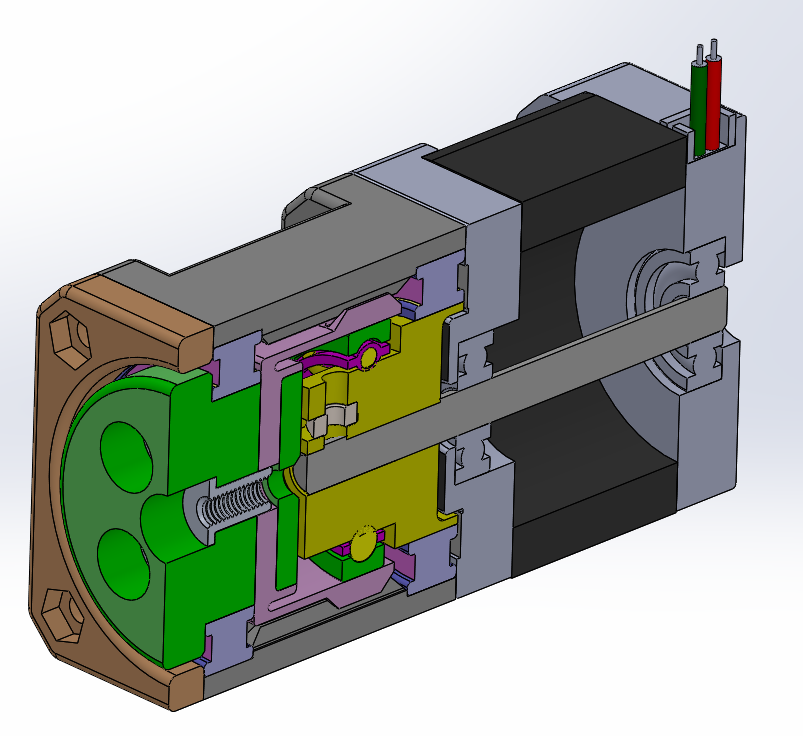
Salut les bricoleurs, Finalement, j'ai trouvé le temps de fabriquer ce HD 20, ça m'empêchait de dormir ! Résultats surprenants pour la taille, ça marche très bien et c'est très costaud, aucune idée sur le long terme ... Très fort couple, pas de backlash, comme le gros que j'ai déjà fabriqué. C'est pas super difficile à concevoir, j'avais fait des erreurs de calculs dans le STEP que j'ai posté plus haut. Deux ou trois prototypes de flexspline, de moyeu elliptique et de cage ont été nécessaires, mais dans l'ensemble, c'était beaucoup plus simple que le gros 1:100. L'avantage, vu la taille des pièces, ça s'imprime en un clin d’œil. Il faudra obligatoirement du TPU 98A pour certaines pièces, j'ai pris du greentec pour le reste car c'est un plastique précis à l'impression. Les pièces "vertes sur les photos" (pas sur la vue 3D) sont imprimées avec une buse de 0.25 mm, le reste en 0.4 mm. Je ne sais pas si ce reportage vous sera utile, en tout cas, je tente de répondre à la question posée. Je vous fait un petit reportage photo et aussi une petite une vidéo pour les curieux, j'ai été agréablement impressionné par le résultat quand j'ai fait les tests. Je joins la BOM et les fichiers STL, car certains sont intéressés, je le sais (@lordzurp) Prix de revient, autour de 10€ (sans le moteur), quelques euros de plastique, le plus cher c'est le roulement à 4€, 13 billes de 4mm, moins de 1€, quelques vis, écrous, inserts taraudés, et c'est tout. Ah si, j'ai oublié 5 vis M3 x 10 tête fraisée dans la BOM. Faites signe si il y a des questions. Vue en coupe : Photos : La vidéo : HD 20 - NEMA 17.mp4 La BOM : Les STL : HD 20 - Nema 17.rar
-
Salut à vous En fait ce serait quoi pour vous le ratio idéal ? 1:100 1:400 plus ? moins ? bien sûr zero backlash, zero angle de torsion (hyper méga rigide), pas cher, voire gratuit, et hyper compact, tout ça va de soi. Mais quid de la premiere question ...? Merci
-
98A
-
@lordzurpet les autres Comme c'est un bidule demandé et évoqué souvent sur ce fil, et que j'avais quelques heures de libres ce soir j'ai fait un design à l'arrache pour Nema 17 assez compact et très simple. --> Je n'ai pas le temps d'imprimer et de tester dans les jours qui viennent. Plus tard peut-être. C'est fait avec Solidworks mais le fichier STEP s'ouvre avec fusion 360, j'ai vérifié, ça marche chez moi. La base c'est un ratio de 1:20, il est assez compact puisque c'est un cube de 42 mm de côté, il faut des vis M3 et des inserts taraudés M3 pour le monter, deux roulements de vélo 37X25x7 mm et 15 billes acier diamètre 4 mm. Il pourrait même s'empiler par 2, mis bout à bout (à condition qu'il marche un jour) pour faire un ratio 1:400. Ce serait vraiment pas cher, 15 à 20€ environ. Les directives sont les mêmes que pour celui que j'ai déjà fait. FlexSpline, bague extérieure et cage de roulement elliptique en TPU, le reste ce que voulez. C'est tout petit, j'ai aucune idée de ce que ça peut donner au final en impression 3D. S'il y en a qui veulent aller plus loin, libre à vous ... encore une fois : non imprimé, non testé, c'est un brouillon ! Assemblage_HD_Nema_17.STEP j'ai juste fait un print de la cage en TPU avec une buse de 0.25 mm pour vérifier que ce point difficile est faisable. Les dents sont bien sorties ! Bon courage.
-

T250 - équatorial : Split ring again ?
Astrokor a répondu à un sujet de Astrokor dans Les bricoleurs
Salut Si tu veux customiser la forme extérieure, je peux t'envoyer deux fichiers STEP des capots et de la circular spline en message privé tout de suite. Je suppose que FUSION 360 lit les *.STEP. Je suis pas trop chaud pour donner tous mes fichiers source pour l'instant. Par contre, si il faut te faire une pièce customisée, il n'y a pas de souci. Comme c'est pas encore validé sur une vraie monture et qu'il me reste à tester une dernière version de flexspline qui devrait être encore mieux, je préfère temporiser un peu. Mais ce que tu me montre, de toutes façons, j'avais déjà ça en tête et je le ferai sûrement avec ce réducteur Mais on en rediscutera ... -
T250 - équatorial : Split ring again ?
Astrokor a répondu à un sujet de Astrokor dans Les bricoleurs
bonsoir à tous Petit compte-rendu d'activité : je suis enfin parvenu à fabriquer une version du réducteur qui semble viable : la V4.0 ... quand même ! Beaucoup de problèmes sont réglés. Pas de backlash en forçant à la main sur l'arbre, juste un angle de torsion qui est réduit au maximum de que j'ai pu faire (on doit pouvoir améliorer encore ce point, notamment en utilisant du nylon, que je ne peux pas imprimer pour l'instant) et il revient en position bien sûr quand on enlève l'effort, plus de bruit suspect de frottement et de claquement aléatoire, pas d'effet toupie perceptible de l'arbre de sortie (mais j'ai pas mesuré au comparateur), très fort couple (le couple moteur - le couple de pertes) x 100 limité par le décrochage des dents de la flexspline en TPU mais j'ai pas réussi à le faire à la main. En mode mouvement rapide, le moteur ne chauffe pas démesurément sur une longue durée, mais le réducteur a quand même un couple résistant significatif, donc pour le choix du plastique il faut en tenir compte, mais ça devrait aller si on fait tout en Greentec et TPU. Il fonctionne aussi à grande vitesse (moteur à fond, jusqu'au décrochage de celui-ci). Un autre point que je ne suis pas parvenu à régler : le bruit audible à grande vitesse, mais je ne suis pas sûr que l'on puisse faire beaucoup mieux avec des pièces en plastique et des dentures droites. Sinon, à un régime de suivi, il ronronne sans bruit perceptible, sauf si on colle l'oreille dessus. Au final, à ce stade, je suis plutôt satisfait, ça m'a pris du temps, beaucoup d'efforts et ... pas mal de plastique pour les divers prototypes, mais le résultat est prometteur, il me reste à l'installer sur mon "début de monture" et le tester. J'espère que ça va bien marcher ; ça semble être une bonne base en tout cas. Pour les intéressés, je partage les fichiers STL et une notice d'assemblage (mise à jour de la précédente) avec autant de détails que possible et des recommandations qui devraient permettre de le fabriquer sans trop de problèmes. Attention, c'est pas du "plug & play" ! il faut faire quelques efforts de réglage, ponçage, etc ... de la patience et de la minutie. Mais les ASTRAMs le sont en général prix de revient : autour de 50€ (sans le moteur), on doit pouvoir réduire un peu masse : autour de 1kg (sans le moteur), pour réduire la masse, faudrait trouver un roulement de sortie de même référence en nylon ou le fabriquer aussi, mais bon ... je stoppe là pour ce "sous-projet" pour l'instant. il est un peu gros : 14 cm de diamètre, 67 mm d'épaisseur, je ne me sens pas capable de faire mieux avec ce ratio de 1:100 Si vous voyez un point bloquant qui fait que ça ne marchera pas, n'hésitez pas à commenter ... je suis preneur de conseils. Assemblage HD100_V4.0.pdfHD-100_V4.0.rar j'ai pris 2 vidéos pour montrer ce que ça donne... moteur 400 pas par tour, sans micro-stepping dans le test (au max de vitesse) HD 100 flex spline en action.mp4 HD 100 V4.0.mp4 -
Bonjour à tous, Les vacances approchant, le bricolage revient au goût du jour. Aussi, comme je repars probablement sur une nouvelle aventure, je me suis dit que peut-être certains d'entre vous seraient intéressés par mes élucubrations du moment. Depuis que j'ai montré mon T350-split ring à un collègue, il essaie de me motiver pour lui en fabriquer un pour lui. J'ai traîné des pieds pendant un moment, échaudé par les efforts que ça a représenté pour moi. Mais il y a quelques mois, il a fini par réussir à me convaincre de regarder comment on pourrait s'y prendre. Il voudrait un instrument vraiment transportable dans le coffre de sa voiture, on partirait sur un diamètre de 250 mm. Il veut vraiment une monture équatoriale semblable à mon précédant instrument : un split ring serrurier, donc bielles démontables. J'ai bien essayé de lui proposer un strock, mais non. Le gros souci du split ring, bah c'est le ring. Il faut que les variations sur le diamètre soient les plus réduites possibles et que l'anneau lui-même soit rigide pour ne pas avoir de mauvaises surprises de suivi. Il y a aussi le souci de la position de l'oculaire fixe, pas top pour observer, mais j'ai une solution pour ça, on ferait tourner le tube entier pour positionner comme on veut l'instrument. Les matériaux, aluminium, plaques et tubes de carbone, impression 3D plastique aussi. Dans mon stock de métal, il se trouve que j'ai un anneau de 65.2 cm de diamètre extérieur (usiné mieux que le 1/10ème), de section 45 mm de haut sur 30 mm de large. L'idée était de le couper en deux tranches (pour réduire la masse) qui, une fois re-surfacées donneraient chacune un hauteur de 20 mm, suffisamment rigides pour ce projet. L'ennui est que cet anneau a 4 trous pré-percés et mal positionnés. Ce n'est pas grave, finalement, ce n'est que cosmétique, et il ne se verront pas une fois l'instrument terminé. Au final, à l'aide de ma vieille fraiseuse et d'une fraise scie, après l'avoir percé de nombreux trous de 14 mm sur sa périphérie pour alléger l'ensemble, je suis parvenu avec beaucoup de patience à couper cet anneau en deux par la tranche . Mais alors, comme on a deux rings maintenant, on a potentiellement deux télescopes ! Une fois surfacés, les deux rings sont bons, ça n'a pas bougé sur le diamètre, on peut partir la dessus --> Ce sera deux télescopes T250 split-rings identiques ! voilà le projet ! Le but serait d'avoir un instrument un peu passe-partout, observation et un peu photo, je partirais sur une focale de 1200 mm donc 4.8 d'ouverture. Il ne faut pas qu'il soit trop long car très dure à équilibrer cette monture. Les optiques, on les achète chez un artisan cette fois ci, soit chez Mirrosphère, soit chez romano ZEN. J'ai avancé pas mal sur la modélisation et les calculs, je partagerai avec vous tout ça si ça vous intéresse car quelques incertitudes subsistent sur la taille du secondaire (deux options à l'étude, un 62.5mm et 67mm qui me semble un peu gros) Voilà l'état de mon modèle 3D, il manque les paliers, les axes, les systèmes d'entrainement, les blocages, etc ... La suite, plus tard, Bonne lecture à vous, si commentaires, n'hésitez pas. K.