keymlinux
-
Compteur de contenus
959 -
Inscription
-
Dernière visite
-
Jours gagnés
4
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par keymlinux
-
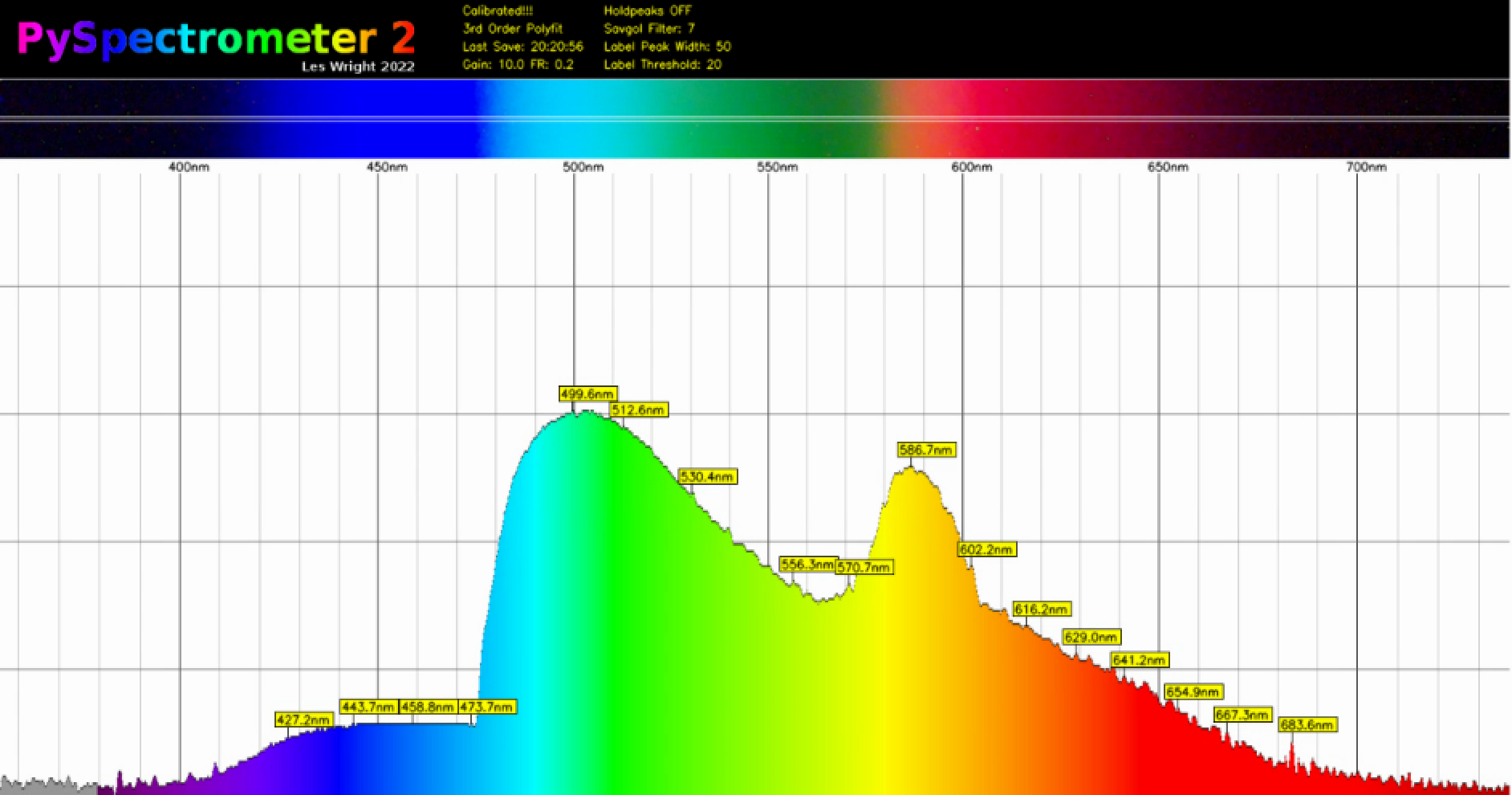
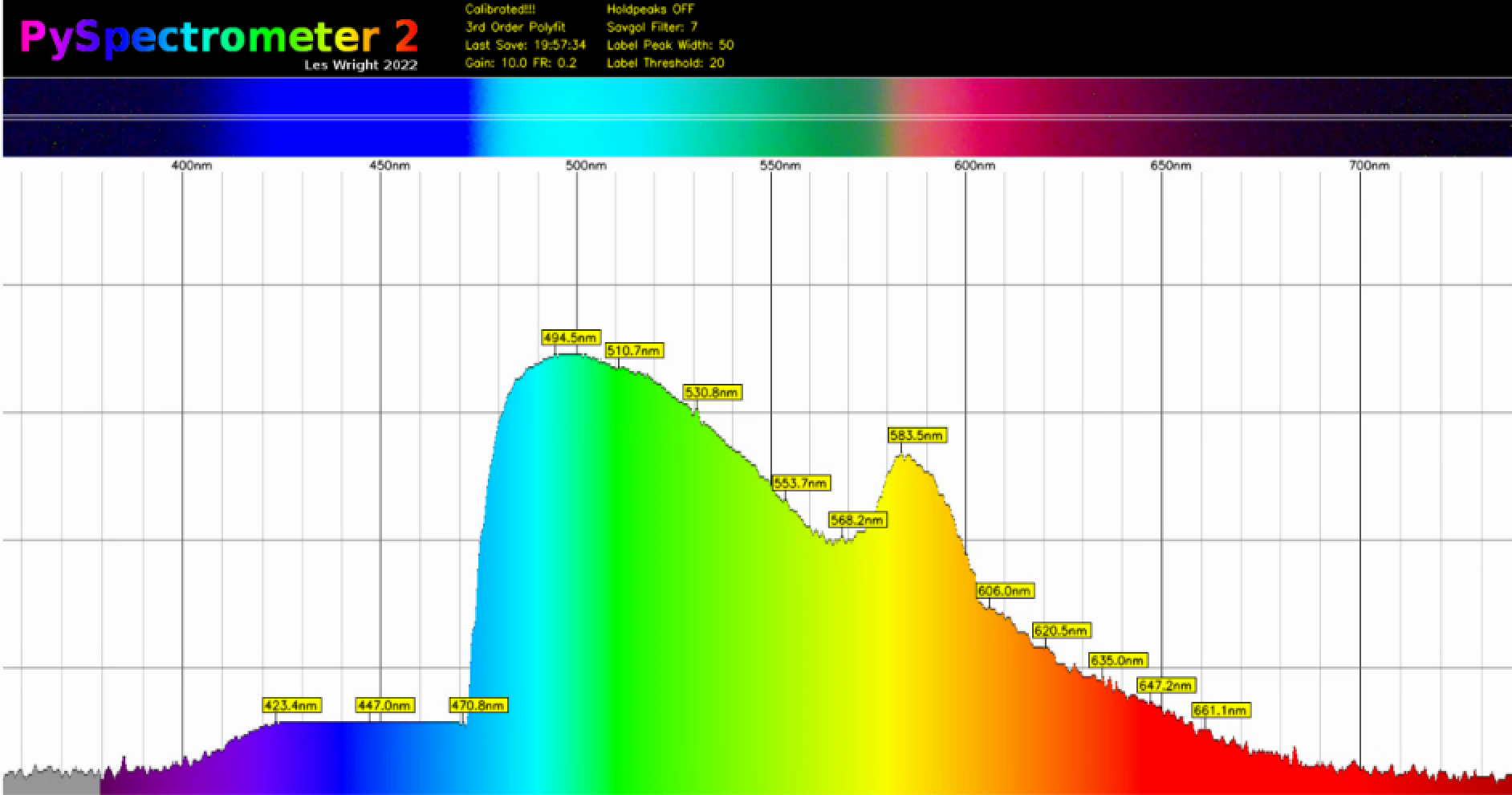
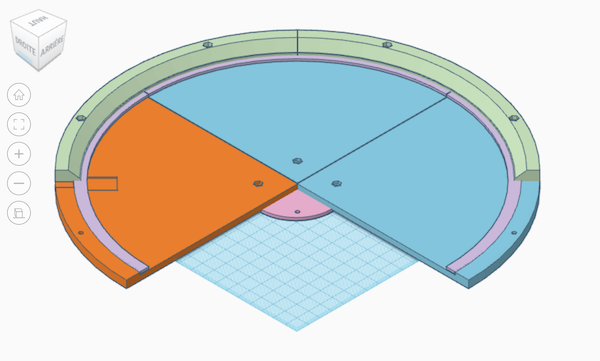
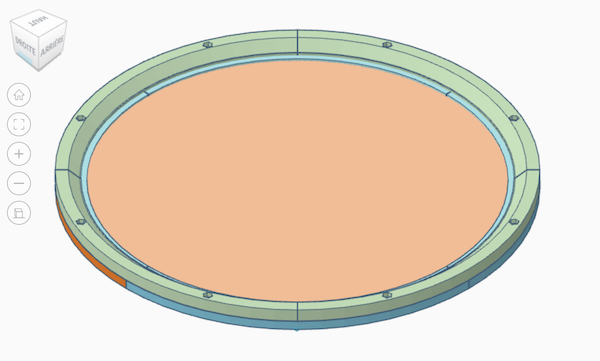
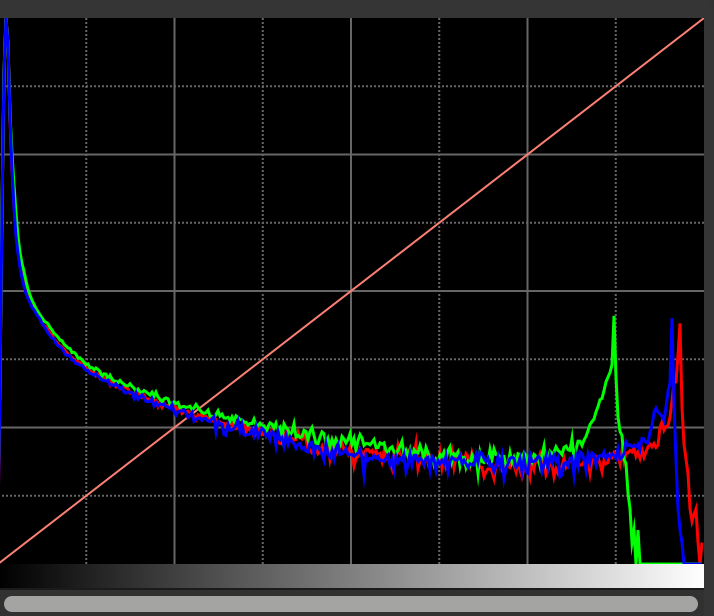
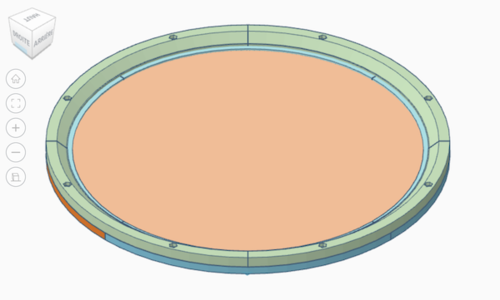
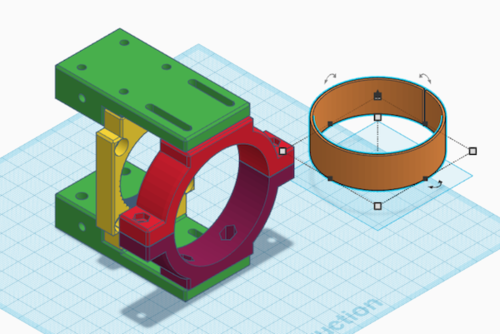
Bonjour, Je vous présente ici la réalisation d'un support pour la réalisation de Flats (PLU) avec un panneau electroluminescent. Donc pas vraiment une boîte à flat avec des leds... Le but: - Pouvoir réaliser des flat sur mon C8 (qui vignette beaucoup avec son réducteur) et avec mon newton 10 pouces Les choix: - Utiliser un panneau electroluminescent rond de diamètre 25cm (compter 40 euros environ, voir ici https://fr.aliexpress.com/item/32906156429.html) - une feuiille de plastique blanc souple pour protéger le panneau (et créer un peu de diffusion), différents formats et densités (plus ou moins transparents), exemple ici: https://fr.aliexpress.com/item/1005004847370228.html - oui je fais le choix de ne pas bricoler une vraie boite à flat avec des led et une alimentation --> l'impression 3D je trouve cela fun, le bricolage électrique et les soudures c'est moins fun (avis perso) Les fichiers STL sont disponibles ici: https://www.tinkercad.com/things/3YRGqgK3p8b-support-flat-25cm-v1 et aussi ici sur Webastro: Le panneau electroluminescent diamètre utile 25cm (avec son transfo 12V) Il a une apparence "rose", mais une fois allumé il éclaire bien en blanc (blanc "froid" comme nous le ferons plus tard) Le transformateur dispose d'une entrée 12V DC (prise standard 5.5mm exterieur, 2.1mm intérieur), et d'un interrupteur 3 positions éteint/clignotant/eclairé Les 4 arcs de cercle blancs sont imprimés 3D en PLA blanc, ils servent de cales et de diffuseurs sur le bord du panneau Le modèles 3D, vue complète Le modèle 3D, vue éclatée Les pièces du support imprimées en PETG noir note: le diamètre total est de 29cm, mon imprimante est limitée à une surface d'impression de 25cmx25cm, donc 5 secteurs à assembler Important: toutes les pièces imprimées 3D le sont avec un remplissage 20%, une buse de 0.4mm et une hauteur de couche de 0.2mm Pour l'assemblage, prévoir: 8 vis M3 longueur 14mm 4 vis M3 longueur 6mm 8 écrous M3 Un petit zoom sur une des 4 parties, dotée d'un creusement pour laisser passer le connecteur du panneau electroluminescent La version assemblée (éteinte) Et allumée notes: - pour protéger le panneau et créer un peu de diffusion, j'ai ajouté une feuille de plastique blanc. - j'ai opté pour une feuille autocollante, et pour ne pas la coller sur le panneau j'en ai coupé 2 feuilles collées l'une sur l'autre. - lors du collage, des bulles d'air ont été emprisonnées (à refaire donc), ce qui explique les taches sombre visibles sur la version allumée Après utilisation pour réaliser quelques FLATs, il apparait que le panneau electroluminescent n'a pas une lumière "blanche" équilibrée, il y a un déficit de rouge et un surplus de bleu/vert (mais je m'en doutais, je ne suis pas vraiment surpris) J'ai fait des tests avec le panneau electroluminescent seul (sans la feuille plastique blanche), et complet (avec la feuille plastique A noter que la feuille plastique absorbe plus le pic bleu/vert que le orange rouge, ce qui m'arrange Spectre lumineux du panneau electroluminescent (sans feuille plastique) Spectre lumineux du panneau avec feuille plastique On note que le pic bleu/vert est plus absorbé que le reste (bon après, vu les conditions dans lesquelles j'ai fait les tests, la qualité de la mesure laisse à désirer) Les statistiques SIRIL d'un FLAT (prise unique sans pré-traitement) note: mon APN Canon donnes des valeurs sur 14bits (0-16383) (en fait 2047-16383 avec l'offset) Un master flat (20 flats empilés avec soustraction d'offset) On note bien le déficit sur le canal rouge, mais à l'usage ce n'est pas vraiment un problème (Siril sait égaliser les canaux) Bilan: Pour moins de 50 euros, j'ai une "boite à flat" fonctionnelle pour le C8 et le Newton 10 pouces, alimentée en 12V DC en nomade Cordialement, Stéphane

-
- 4
-

-

-

Version 1.0.0
10 téléchargements
Bonjour, Dans le fichier ZIP, les STL permettant d'imprimer les différentes parties Permet d'obtenir un support (diamètre 20cm) pour un panneau electroluminescent de diamètre 25cm à 26cm Pour le montage prévoir: 8 vis M3 longueur 14mm 4 vis M3 longueur 6mm 12 écrous M3 Pour le panneau electroluminescent vous pouvez utiliser cela: https://fr.aliexpress.com/item/32906156429.html Voir sujet ici -
Version 1.0.0
4 téléchargements
Voir sujet -
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
Version 1.15.6.1 testée - Les point 3, 4, 5 et 6 sont résolus. - Le point 2 est contourné 🙂 en réduisant la taille du changelog (je sais, je pinaille, le contournement me vas très bien) - Le point 1 est contourné en forçant le lancement de Sirilic en mode plein écran. Mais le problème reste entier si on repasse en mode fenêtré où la fenêtre reste plus grande que le bureau (voir ci dessous pourquoi je déteste les applications qui se lancent en forçant le mode plein écran) - Pour le point 6, c'est OK à un détail près, à savoir les cases à cocher dont le fond semble transparent et qui restent peu visibles en thème "Sombre",, mais ici aussi, je pinaille, cela peut rester comme cela. Aucune anomalie (possible régression) constatée. Histoire de raconter ma vie, le pourquoi je n'aime pas les applications qui se lancent en forçant le mode plein écran - par choix personnel: je préfère le mode fenêtré (les goûts, le couleurs, ...) - par choix pratique: en plus d'un macbook, j'ai aussi un PC de bureau sous Windows, principalement pour faire du FlightSimulator, avec 3 écrans agrégés en 1 seul virtuel (AMD Eyefinity) --> si une application se lance en mode plein écran alors je me retrouve avec une fenêtre de 5760x1200 qui s'étale sur les 3 écrans --> affreux 😉 Cordialement -
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
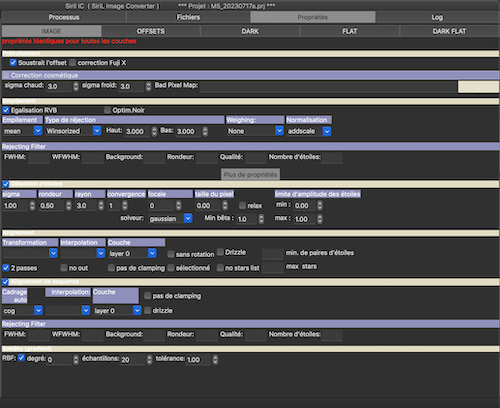
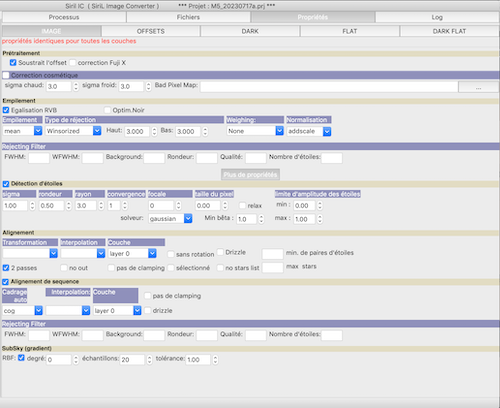
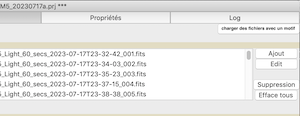
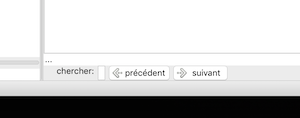
Bonjour. Oui, c'est compliqué, et d'autant plus que sur certains OS (dont MacOS) l'éditeur ne fait rien pour faciliter les choses, bien au contraire en faisant tout pour garder un système fermé. Tant que c'est cosmétique ce n'est pas important, et le manque d'icônes dans les menus ne me gène pas. J'en profite pour lister ci dessous certains autres problèmes cosmétiques (dont certains sont spécifiques MacOS), qui ne sont pas liés à la dernière version mais présents historiquement... 1) WINDOWS+MACOS: au lancement de Sirilic, la fenêtre principale est en mode fenêtrée (pas plein écran), mais sa hauteur est supérieure à la taille du bureau, il faut redimensionner à chaque fois si on veut rester en mode fenêtre (ou passer en plein écran qui redimensionne automatiquement))... 2) WINDOWS+MACOS: la fenêtre a propos s'ouvre systématiquement avec une hauteur égale à la taille du bureau, elle n'est pas redimensionnable, mais tout le contenu n'est pas visible et pas de possibilité de faire un scroll (peut être ajouter une barre d'ascenseur...) 3) MACOS: dans l'onglet "log", en bas, le champ de recherche est trop petit 4) MACOS: dans les boites de dialogues "nouveau projet"/"modifier un projet" les champs de saisie "nom de l'objet" et "nom de session" sont trop petits 5) MACOS: dans l'onglet "fichiers", le nouveau bouton "charger les fichiers avec un motif", problème de lisibilité, bouton et police de caractère un peu petits 6) MACOS: dans le nouvel éditeur, problème de visiblité des numéros de lignes si utilisation du thème "Sombre" de MacOS 7) MACOS: dans l'onglet propriété, ici aussi divers problème de visibilité si utilisation du mode "sombre" on note: - affichage peu lisible en blanc sur beige dans les lignes "prétraitements"/"alignement"/"detection d'étoiles"... - ici la case à cocher "detection d'étoiles" est cochée et visible, mais si non cochée la case est quasi invisible en beige sur fond beige - même problème pour la case à cocher "correction cosmétique", non cochée la case apparait (difficilement) mauve sur fond mauve Voilà, mais tout cela n'est que cosmétique, on peut faire avec, et cela n'enlève rien au fonctionnalités de Sirilic. Merci encore pour tout tes efforts et pour le temps que tu investit dans le développement de ce logiciel. Cordialement, Stéphane edit: la section 6 en double ci dessus est re-numérotée 7...
-
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
Sirilic 1.15.5 testé sur MacOs 10.14 Mojave. Pas d'icones visibles dans les menus. Pour le reste, aucune anomalie constatée. -
Bias,flat,Dark,Lights je ne comprends rien aidez-moi s'il vous plaît
keymlinux a répondu à un sujet de aurl33 dans Support débutants
Bonjour, Les Lights ce sont les photo de l'objet que tu desire imager, donc c'est obligatoire 🙂 L'usage des Dark/Flat/Bias n'est pas obligatoire, mais cela améliore la qualité du résutlat final. Un très bon tutoriel ici: L'auteur propose de télécharger un lot d'images (light/dark/flat/bias) pour que l'on puisse s'entrainer -
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
Avec ce fichier, aucun changement Là par contre c'est mieux - dans la fenêtre de l'éditeur, le menu fichier "ouvrir/sauvegarder/sauvegarder sous" est fonctionnel, les raccourcis clavier aussi - dans la fenêtre principal de sirilic, les menus sont ok aussi, le passage d'un onglet un autre est fonctionnel aussi EDIT: et comme les bugs çà vole en escadrille, voici quelques autre bizarreries - quand j'ouvre le menu à propos j'ai un message d'erreur - et c'est un détail, mais dans la fenêtre "a propos", qui s'ouvre quand même malgré le message précédent, il faudrait corriger le lien vers le gitlab, il y a https://gitlab.com/free-astro/pysolarscan au lieu de https://gitlab.com/free-astro/sirilic Cordialement
-
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
Bonsoir, Testé avec le nouveau fichier, pas de modification du comportement, les menus restent grisés (ceux de la fenêtre d'edition, et ceux de la fenêtre principale sirilic). Cordialement -
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
Non le raccourci CMD⌘+S ne fonctionne pas non plus -
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
Avec ce fichier j'ai un comportement un peu différent - pour la fenêtre de l'éditeur, dans le menu fichier les éléments "ouvrir/sauvegarder/sauvegarder sous" sont toujours grisés - par contre si je force la fermeture de la fenêtre de l'éditeur alors la fenêtre sirilic retrouve un comportement normal (menus non grisés, passage d'un onglet à l'autre fonctionnel) -
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
Bonsoir, @m27trognondepomme wxpython version 4.2.1 (pip ne me propose pas de mise à jour) en lançant manuellement scripteditor.py, pas de boutons visibles, par contre le menu "Fichier" puis "ouvrir/sauvegarder/sauvegarder sous" est fonctionnel. -
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
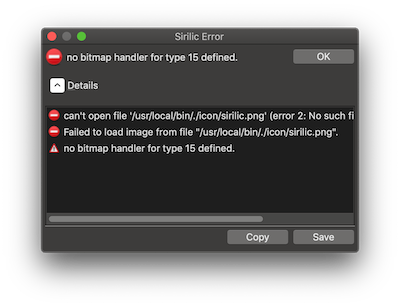
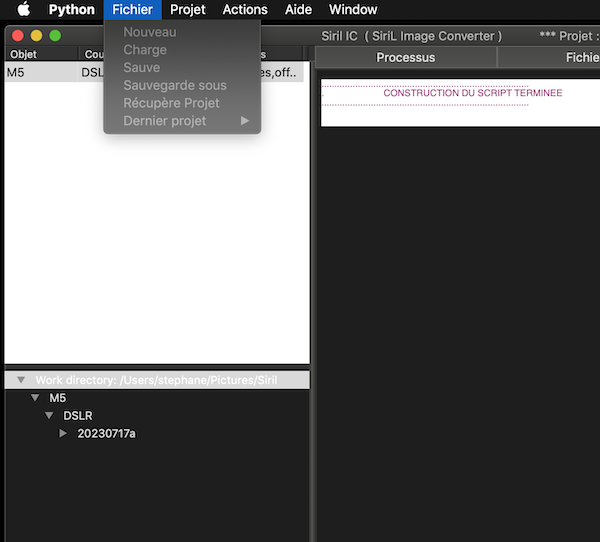
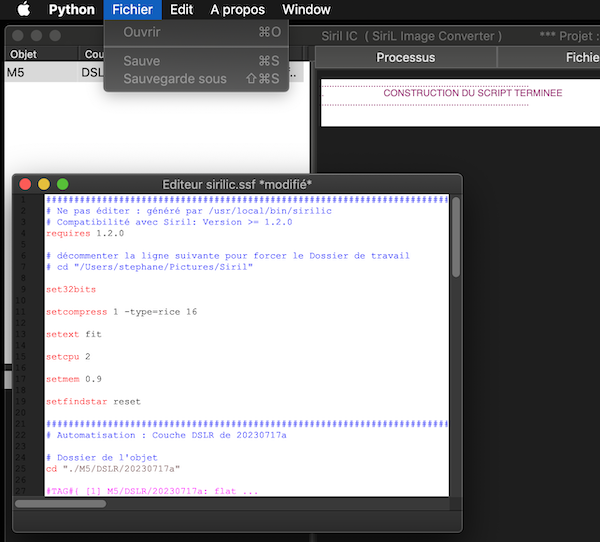
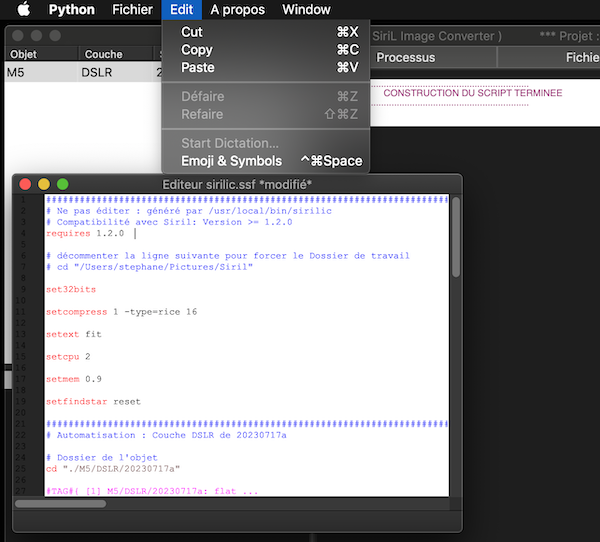
Bonjour, @m27trognondepommeJe viens d'installer et tester la version 1.15.3 et j'ai un problème avec la nouvelle fonctionnalité concernant l'ajout d'un éditeur interne. Les conditions du test: Python 3.10 sous MacOS 10.14 (oui c'est encore moi le casse c.. de service qui bosse sur un mac... 😉 ) Le comportement: - je lance sirilic, le dernier projet est chargé automatiquement, je fais générer le script, jusque là tout va bien - le choisi de modifier le script, cela lance l'éditeur, très bien, au passage super l'éditeur avec les couleurs pour la syntaxe... - et là c'est le drame, car si je peut modifier le fichier, il ne m'est pas possible de l'enregistrer - dans le menu "Fichier" les éléments "Ouvrir/Enregistrer/Enregistrer sous sont grisés - dans le menu "Edit" j'ai bien accès a "copier" et "coller" qui ne sont eux pas grisés - comme il n'y a pas d'option de fermeture "propre" de l'éditeur je ferme la fenêtre (le bouton rouge dans le coin) - dans la fenêtre principale de sirilic, tout est figé --> les menus sont grisés, je ne peux plus changer entre les onglets processus/fichiers/propriétés/log --> c'est comme si la fenêtre de l'éditeur avait gardé un focus (d'ailleurs quand la fenêtre de l'éditeur était ouverte j'avais le même comportement de la fenêtre principale sirilic, tout était figé) Une idée ? quelques copies d'écran: Lorsque je lance l'éditeur, le contenu du menu "Fichier" est grisé --> je ne peut pas enregistrer mes modifs Par contre dans le menu "Edit" certains elements sont opérationels Dans la fenêtre sirilic, tous les menus sont grisés après le lancement de l'éditeur (que je laisse la fenêtre de l'éditeur ouverte ou bien que je la ferme) Cordialement, Stéphane
-
Bien paramétrer ses prises de vue : où trouver des infos/tutos ?
keymlinux a répondu à un sujet de obulle dans Astrophotographie
Bonjour, Certaines règles sont issue de calculs théoriques (par exemple l'échantillonnage), d'autres sont issues de de l'expérience.. Pour la "règle" dont tu parles sur le ratio de 2 ou 3 entre le bruit et le signal de fond de ciel, je pense qu'il s'agit de la règle des 3 sigma voir lien ci dessous (l'auteur de ce post est de grande experience, et tu trouveras dans sa signature des liens vers des tutoriels intéressants) Cordialement -
Le fuseau horaire ! Ou comment éviter de perdre une nuit pour un truc tout bête
keymlinux a répondu à un sujet de Lenico75 dans Support débutants
Bonjour, Il n'y a rien de bête ici, je crois que c'est le genre d'erreur que l'on est plusieurs ici à avoir fait (et je m'inclus dans le lot) Par contre techniquement il ne s'agit pas d'un problème de fuseau horaire qui dépend du lieu (en France le fuseau horaire est bien à GMT+1 toute l'année), mais d'un décalage supplémentaire temporaire en été, décalage que n'appliquent pas tous les pays d'ailleurs. En france on appelle cela l'heure d'été, le terme technique c'est "DST" pour Daylight Saving Time Pour ceux qui ont des montures skywatcher, lors du démarrage de la raquette de commande on doit d'ailleurs indiquer l'heure locale (de nos montres), le décalage du fuseau horaire (GMT+1 en France) et la question est posée "DST Yes/No", et c'est la valeur donnée à cette question qui fera que la monture appliquera un décalage de 1h supplémentaire pour determiner l'heure GMT en fonction de l'heure locale renseignée. Cordialement -
Adaptateur allume-cigare/prise 2.5 mm
keymlinux a répondu à un sujet de Gaiar60 dans Matériel général
Bonjour, Tu ne le précises pas mais je suppose que ta camera/apn + éventuelle camera de guidage est alimenté via l'asirair.... A mon sens le problème c'est la multiprise (triplette) qui fait que tout ton setup est alimenté en courant par une seule prise allume-cigare en sortie de batterie. A ta place je supprimerais la triplette et connecterais 3 prises allumé cigares différentes sur la batterie. Et pour éviter le câbles qui pendent dans tous les sens, tu devrais mettre ta batterie dans une boite, équipée avec des prises 12V (+ fusibles et interrupteurs) voir bricolage ici: Cordialement, Stéphane -
Bonsoir, Le script livré avec Siril est fait pour traiter des fichiers offsets, pas pour utiliser un offset synthétique Si tu veux utiliser un offset synthétique il faut: - soit faire le calibrage à la main, sans scripts - soit créer un script qui utilise l'offset synthétique, pour cela il y a 2 solutions - tu fait une copie tu script de processing existant et tu le modifie toi même la main... - Tu utilise Sirilic, qui générera pour toi un script en fonction des options que tu choisira --> moi j'ai choisi mon camp, j'utilise Sirilic Cordialement
-
Tu peux aussi le faire en ligne sur ce site: https://nova.astrometry.net/upload Cordialement
-
TUTORIEL pour le traitement complet d'une image avec les scripts SIRIL
keymlinux a répondu à un sujet de Colmic dans Astrophotographie
Bonjour, @transitmk1, je pense que tu devrais créer un autre sujet pour ton problème avec starnet, sinon il y risque de polluer ce topic plus générique Tu dis que tu viens de passer à windows10, donc je suppose que tu avais un "vieux" PC avec un windows7, si il est trop vieux il est probable que ton processeur ne supporte pas le jeux d'instructions AVX nécessaire à Starnet. Ici il y a (en anglais) un forum avec un fil de discussion sur les problèmes starnet, fil animé par le développeur: https://www.cloudynights.com/topic/808556-starnet-v2/page-16 Et pour voir si ton processeur est compatible AVX: https://en.m.wikipedia.org/wiki/Advanced_Vector_Extensions Cordialement -
Quel module peltier pas trop fort ?
keymlinux a répondu à un sujet de Nature Photo dans Les bricoleurs
Bonjour, Pour refroidir une ASI178mm (modele sans refroidissement à l'origine), j'ai pris un module peltier 40x40x4.2mm alimentée en 12V (36W) voir ici par exemple https://www.amazon.fr/gp/product/B081JMVHD5/ref=ppx_yo_dt_b_asin_title_o04_s01?ie=UTF8&psc=1 La consommation de 3 ampère max en 12V n'est pas trop un problème (l'idée c'est de réguler, on tire beaucoup de courant au debut pour refroidir, moins une fois la temperature voulue atteinte) Le problème ici c'est l'épaisseur de 4,2mm au lieu de 3mm, a voir si c'est rédhibitoire pour toi Sinon il y a le modèle ci dessous qui a une épaisseur de 3.2mm, il a plus de capacité de refroidissement (donc aussi une capacité a consommer plus de courant et a te vider une batterie rapidement, mais tu n'est pas obligé de l'utiliser à 100% de sa puissance https://www.amazon.fr/Refroidisseur-Thermoélectrique-TEC1-12709-Peltier-Dissipateur/dp/B0BG22PP6S/ref=sr_1_1?__mk_fr_FR=ÅMÅŽÕÑ&crid=1806T71U1X9M9&keywords=peltier+40x40x3mm+12V&qid=1685643456&s=industrial&sprefix=peltier+40x40x3mm+12v%2Cindustrial%2C52&sr=1-1 Pour le contrôle du module peltier, j'utilise le module ci dessous, il permet de monitorer la temperature (sonde fournie), permet de fixer une temperature de consigne, et il s'occupe du reste (au debut je pensais devoir en bricoler un avec un arduino, mais ce module fait déjà le job, pour un prix contenu) https://www.amazon.fr/gp/product/B07RHDS2RN/ref=ppx_yo_dt_b_asin_title_o03_s00?ie=UTF8&psc=1 Cordialement, Stephane -
Impossible de prendre une photo
keymlinux a répondu à un sujet de LoganSlendy dans Support débutants
Bonjour, Habituellement les Newton (sauf ceux optimisés pour l'astrophoto) ont un foyer qui sort très peu du porte oculaire, et donc avec un APN on n'arrive pas à faire la mise au point Dans un APN canon le capteur est 44mm à l'intérieur de l'APN (fléchée verte ci dessous) Sur l'APN on fixe habituellement une bague EOS-M42 de 11mm de large (flèche bleue) Et sur le filetage on fixe un tube 1,25 ou 2pouces à glisser dans un porte oculaire A priori ici au lieu de glisser ce tube dans le porte oculaire (flèche jaune) tu as ajouté un tube d'extension (fleche rouge) Si le tube d'extension est démontable je t'invite à tester sans pour rapprocher le capteur de l'APN du porte oculaire note: a priori tu as un dobson flextube, tu peu aussi tester de ne pas remonter la cage du secondaire au maximum pour que le foyer sorte un peu plus, au prix d'une légère perte en luminosité --> le cone de lumière remontant du miroir primaire vers le miroir secondaire sera alors un peu plus grand que le miroir secondaire, mais le foyer ressortira un peu plus du porte oculaire Cordialement
-
Traitement prise de vue avec filtre Optolong L-Pro
keymlinux a répondu à un sujet de Ricky dans Aide SIRIL de Siril et Sirilic
Concernant le fichier fit que tu propose en téléchargement: Une fois ouvert via Siril, en observant sa courbe d'histogramme avant toute modification, j'observe un truc qui me paraît bizarre (en tout cas que je n'observe pas sur mes empilements, mais je ne pretend pas être un expert en traitement) Le pic vert est très détaché des pics rouge et bleus à droite de l'histogramme. Je ne rencontre pas ce comportement habituellement, et je le mettrais (à tord ou raison ?) sur un manque de normalisation des 3 canaux couleur lors de l'empilement --> ne serait ce pas la source de ton problème de manque de couleur ?
-
Traitement prise de vue avec filtre Optolong L-Pro
keymlinux a répondu à un sujet de Ricky dans Aide SIRIL de Siril et Sirilic
Comme le signale @180Vision ta cam est donnée pour des pixels de 3.3microns, dans le fit il y a 1.69microns, ce qui laisse supposer que tu a utilisé l'option drizzle. Mais a mon sens c'est superflu, cela ne sert que si tu est sous échantillonné, ce qui n'est pas le cas ici avec 1400mm de focale e=206x3.3/1400=0.48 Même si le filtre bouffe pas mal de lumière, un temps de pose de 420s me semble excessif, car même si tu as une monture compétition avec du suivi, le problème va être la montée du fond du ciel. Et ensuite au traitement un empilement de 10 images c'est peu pour faire baisser le bruit... Pour le temps de pose unitaire tu devrais le verifier avec la règle des 3 sigma, voir lien ci dessous -
Sur une lunette (ou objectif photo) tu peux tenter un bricolage avec du fil de pêche tendu en croix devant l'objectif. Cela te donnera a peu près le même résultat qu'un support de miroir secondaire sur un newton. Ceci étant je ne cautionne pas, je préfère les étoiles bien rondes 🙂
-
Bonsoir, 1) pour les offsets on fait des images à faible temps e pose (ici 1/8000 sec), et pour les darks des temps de pose de même durée que les images "light" de l'objet photographi, mais ces images sont NOIRES, donc il n'y a pas d'étoiles à y trouver et donc la FWHM sera de -1, c'est normal Et c'est normal aussi de les traiter sur 1 seul canal monochrome 2) si ce sont tes lights de M101 que tu traites par contre, alors il est nécessaire de cocher l'option "debayer" (dématricer) dans l'onglet conversion et donc tu obtiens des images avec 3 couches couleur EDIT: et quand je regarde ta copie d'écran en detail je ne comprend pas ce que tu fait... - l'image affichée montre des étoiles donc a priori tu traite des lights - mais le message d'erreur dans la log est a priori généré sur le traitement de flats vu que cela tente de lire un fichier flat_00001.fit (dans le cas des flats il faut une normalisation multiplicative) - mais quelques lignes plus bas je vois des temps de pose de 1/8000 sec, qui sert plutôt pour des offsets que pour des flats (sauf si tu fait tes flats avec un éclairage de 200W) EDIT 2: et si ce sont les lights que tu traite, alors le fait qu'il n'y ait qu'un canal montre que tu a oublié de dematricer L'erreur MAD, tu l'as pour les darks, pour les offsets, pour les flats ou pour les light ? Normalement offset et dark on ne fait pas de normalisation, pour les flats c'est normalisation multiplicative, et pour les lights c'est normalisation additive