keymlinux
-
Compteur de contenus
1003 -
Inscription
-
Dernière visite
-
Jours gagnés
5
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par keymlinux
-
@berenthorJ'ai vu que les fit ont été générés par Indi. Dans la dernière version (3.6.8) de kstars/ekos/indi il y a de nouveaux "placeholders", tu pourra utiliser %I dans le nom du fichier pour que celui ci contiennent la valeur ISO utilisée à la prise de vue
-
La brute light est faite a iso 100, le dark à iso 800...
-

monter un viseur point rouge sur un appareil photo
keymlinux a répondu à un sujet de rolandbreche dans Matériel astrophotographique
Bonsoir, Pour le réglage de l'alignement, sur la photo ci dessous: "élévation Adj screw" et "Windage Adj scrw", avec une clé 6 pans M3 J'un un viseur point rouge quasi identique monté de base sur mon newton Sumerian Optics, et pour garder la clé 6 pans à portée de main elle est fixée avec 2 petits aimants neodyme sur le coté du viseur... Pour ta question 2, je dirais que cela sent la traduction automatique bullshit 😅 Cordialement
-
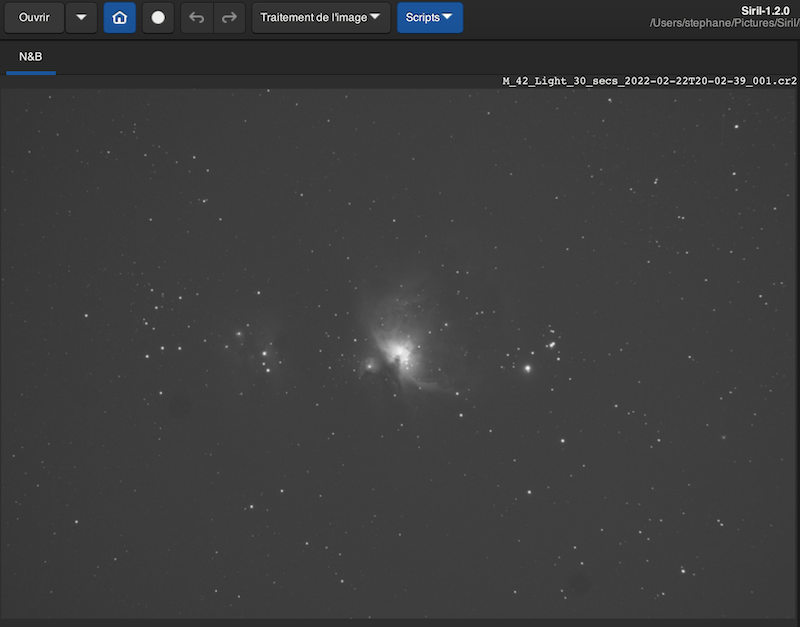
Quelle drôle d'idée ? 😅 Même sans calibration, je trouve que la trame est vraiment importante sur ta brute Ci dessous une brute de 30s à 800iso sur M42, OK c'est pas le même capteur (APN Canon 80D), mais je suis étonné d'avoir une telle différence note: tu n'as pas précisé quel ISO tu utilises sur l'APN note: ci dessous image raw canon ouverte dans siril sans dématricage, affichage en auto ajustement (on vois bien les poussières sur le capteur...) Ceci étant, même avec de la trame sur les brutes, vu que tu as fait du dithering il devrait s'atténuer à l'empilement et cela ne semble pas le cas, les défauts les plus importants sur la brute apparaissent au même endroit sur l'empilement. Tu est sur de tes paramètres de dithéring (toutes les combien de pose ? décalage de combien de pixels ? ) EDIT: - en cherchant sur le net j'ai vu que le Canon 1000D date de 2008, le Canon 80 date de 2016, ceci explique peut être la différence de trame entre les 2 brutes - si il y a d'autres utilisateurs de Canon 1000D qui passent par là il serait interessant qu'ils donnent leur avis sur la trame, pour savoir si ils en ont aussi (et aussi marquée) sur leur APN ou pas Cordialement
-
Bonjour, Il s'agit d'un telescope japonais hébergé à Hawai La page wikipedia: https://fr.wikipedia.org/wiki/Subaru_(télescope) La page (disponible uniquement en anglais ou japonais) de 'Observatoire Astronomique National du Japon https://www.naoj.org/en/ Concernant le faisceau laser: il s'agit d'un dispositif (optique adaptative) permettant de corriger les effets turbulence atmosphérique En résumé: le laser produit une étoile fictive qui sera utilisée comme guide, puis plusieurs fois par seconde (plusieurs dizaine de fois à plusieurs centaines de fois par seconde), une camera va analyser les mouvements et deformations de cette étoile fictive, pour agir sur un dispositif optique du telescope permettant de corriger l'image. Autrement dit, on observe une deformation pour appliquer une contre-déformation reprochant l'image de c que l'on aurait obtenu sans l'atmosphère source de déformation (problème que l'on a pas avec les telescopes dans l'espace) Des infos ici https://fr.wikipedia.org/wiki/Optique_adaptative Et en video: Cordialement
-
monter un viseur point rouge sur un appareil photo
keymlinux a répondu à un sujet de rolandbreche dans Matériel astrophotographique
Bonjour Pour un support de sabot de flash en metal il y a cela: https://www.pierro-astro.com/materiel-astronomique/accessoires-optiques/chercheurs/adaptateur-red-dot-pour-grip-flash_detail Pour un support en impression 3D: https://azur3dprintshop.com/42-support-viseur-apn.html Avec ce dernier support on obtient une base "mini vixen", il faudra donc on viseur point rouge avec le pied (certains sont vendus avec d'autre sans) Et si tu a toi même une imprimante 3D tu peux trouver un modele a imprimer ici même sur webastro (il faut s'inscrire au club "impression 3D en astronomie", c'est sans engagement, menu Forums/Clubs en haut de la page) Cordialement -
Montage vissé de préférence
keymlinux a répondu à un sujet de Forever_young dans Matériel astrophotographique
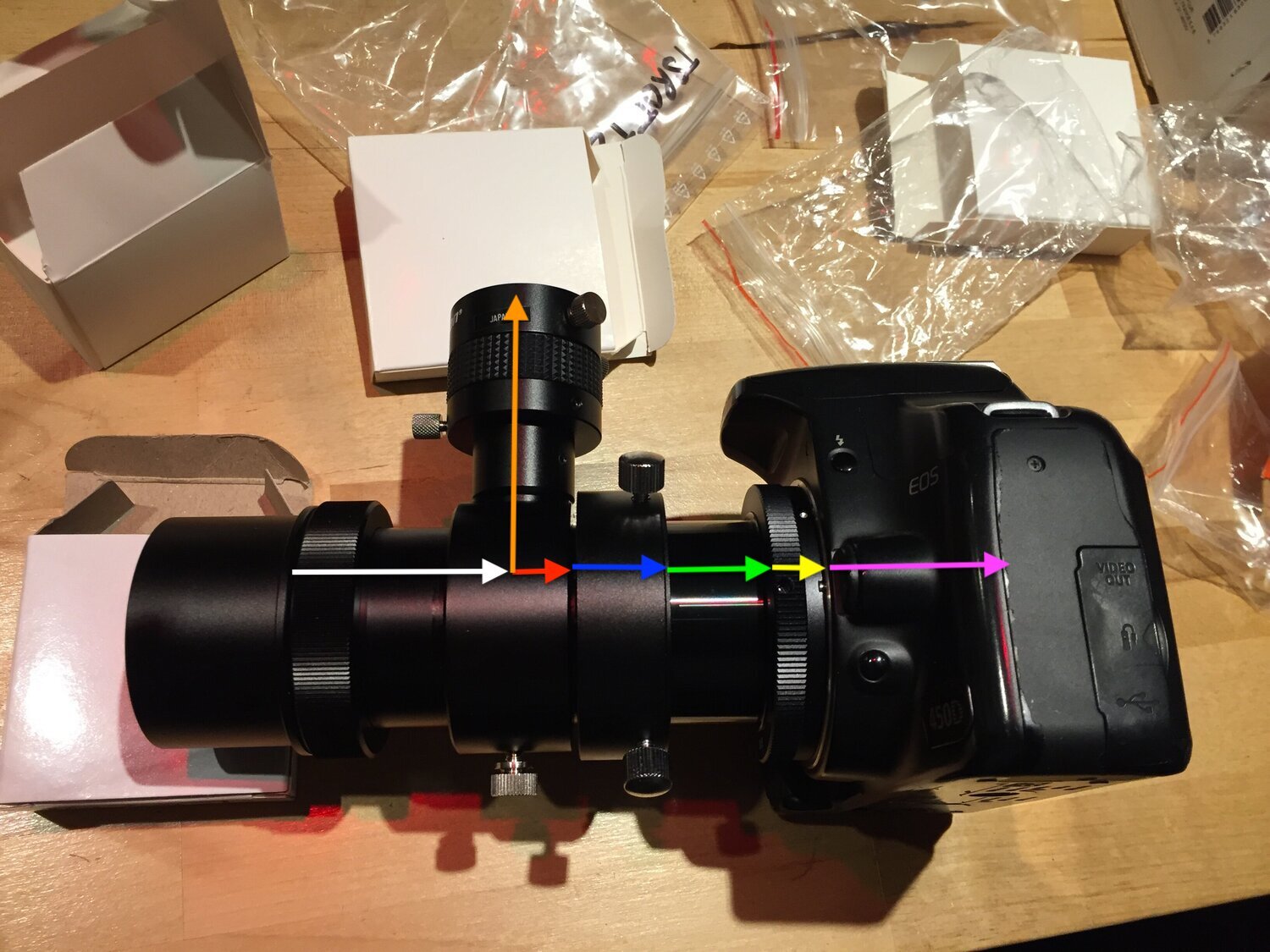
Bonjour, 1) Pour avoir à la fois la mise au point sur l'APN et sur la camera de guidage, les 2 longueurs de chemin optique doivent être identiques Voir les flèches colorées sur l'image modifiée ci dessous Flèche verte: 44mm (distance entre le point d'oui des objectifs et le capteur sur un APN Canon Flèche jaune: habituellement 11mm, bague T2-EOS Flèche verte: bague allonge 20mm (si possible à enlever !) Flèche bleue: rotateur, a vue d'oeil entre 15 et 18mm Flèche rouge: distance entre elle prisme et le bord du DO, a vue d'oeil 10mm Total environ: 100 à 103mm La flèche orange, entre le prisme et le capteur de la camera guide devra aussi faire 100 à 103mm, des tubes allonges seront nécessaires , ou pas, il faudra plutôt raccourcir le chemin optique entre elle DO et l'APN à cause de la limitation décrite au point 2 2) Ta lunette ne disposera pas forcement en sortie de PO d'un chemin optique suffisant pour le montage que tu as prévu... Au 100 à 103mm que l'on a calculé, il faut ajouter environ 30mm distance entre le prisme du DO et le bord du tube au coulant 2pouces que tu va mettre dans le PO (la flèche blanche), soit 130 à 133mm: est tu sûr de disposer d'une telle longueur en sortie de ton PO pour obtenir le foyer ? 1ere option: supprimer le tube allonge de 20mm 2nde option: si vraiment pas le choix pour avoir le focus, supprimer le rotateur pour gagner 15à18mm supplémentaires (le cadrage sera alors obtenu en faisant tourner le coulant 2pouces dans le PO, mais c'est vrai que c'est moins pratique (à noter que si le rotateur a un peu de jeu cela va causer du tilt et annuler l'avantage d'avoir un montage vissé) Cordialement
-
Premiers photons au C8 Edge HD sur M81
keymlinux a répondu à un sujet de Nano67 dans Astrophotographie
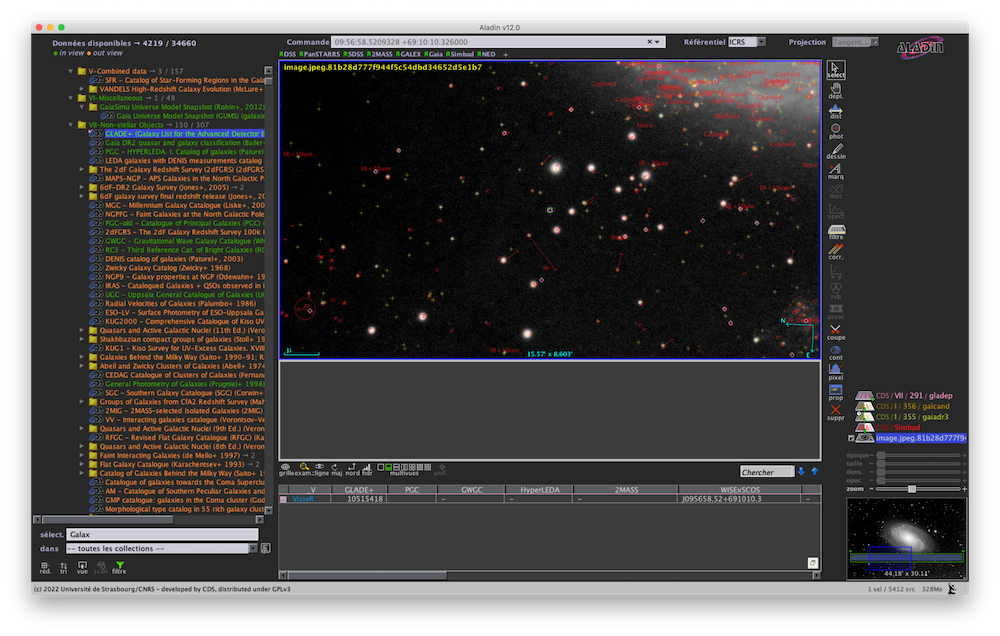
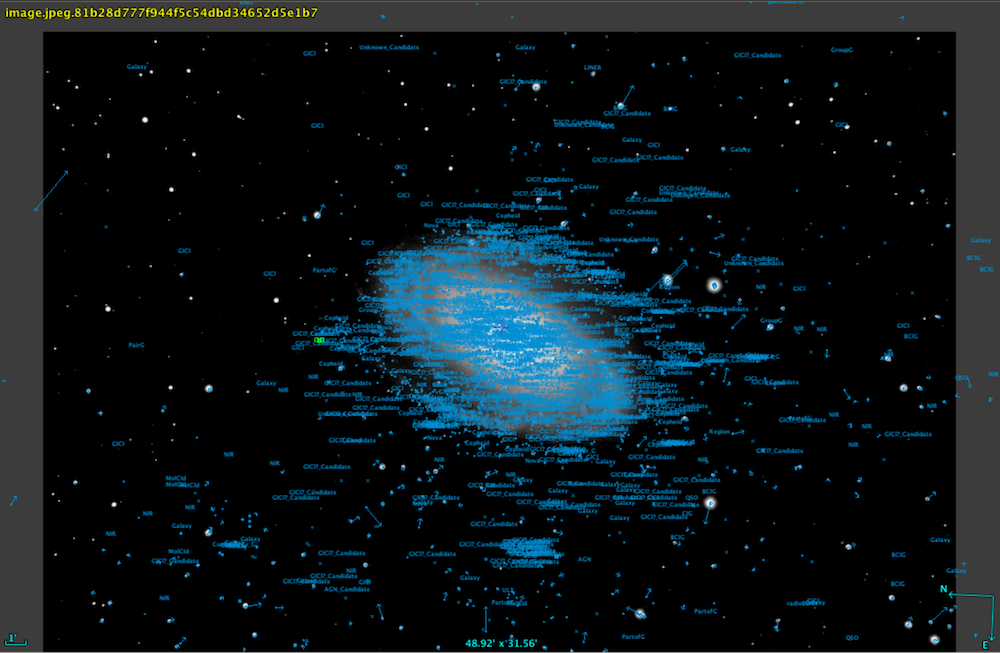
Je m'auto-cite, pour corriger, je l'ai trouvé dans Aladin dans le catalogue GLADE+, objet numéro 10515418, il s'agit bien d'une galaxie, avec une magnitude optique de plus de 19... Les détails de l'objet: http://vizier.nao.ac.jp/viz-bin/VizieR-5?-info=XML&-out.add=.&-source=VII/291/gladep&recno=10515418 La capture d'écran (zoomer sur le petit carré vert au centre de la vue "photo":
-
Premiers photons au C8 Edge HD sur M81
keymlinux a répondu à un sujet de Nano67 dans Astrophotographie
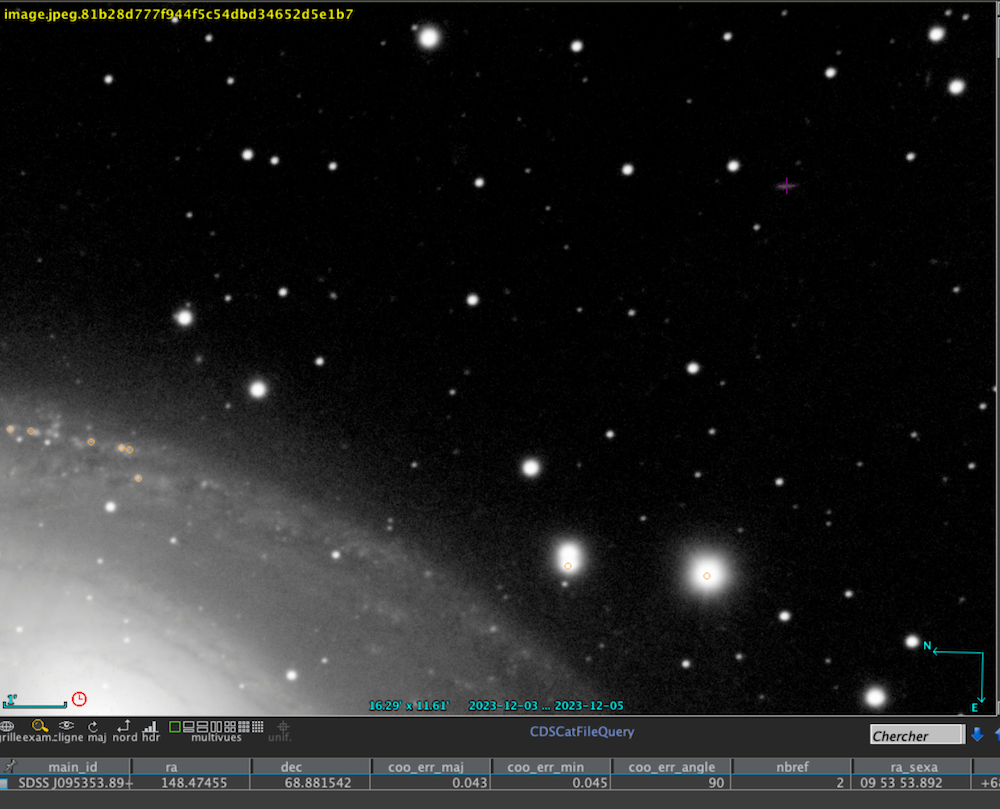
Bonjour, Oui, a priori une galaxie lointaine, mais je ne la trouve pas dans les catalogues Il y en a d'autres dans l'image, par temple dans le coin en haut à droite (la croix rouge dans l'image ci dessous), elle est dans le catalogue SDSS @Nano67La capture d'écran est issue du logiciel Aladin (desktop) http://aladin.cds.unistra.fr/aladin.gml J'ai pris l'image jpeg que tu partageais, je l'ai ouverte avec Siril pour faire une astrométrie, puis ai enregistré le résultat en FIT (contenant donc la solution astrométrique), puis ouverture du FIT avec Aladin, ensuite on charge des catalogues (en limitant si possible la portée au champ de vue de la photo). Aladin est un logiciel très complet, qui s'appuie sur les catalogues hébergés par le Centre de données de Strasbourg, mais il est aussi COMPLEXE a prendre en main... Cordialement
-
Premiers photons au C8 Edge HD sur M81
keymlinux a répondu à un sujet de Nano67 dans Astrophotographie
Bonjour, @pleclechtu l'a vu à quel endroit ? parce qu'il y a un paquet d'objets....
-
Bonjour, 1) Dans le titre du post tu met RJ11, c'est le format des prises téléphoniques, sur la raquettes Synscan c'est RJ12 et RJ45 2) Sur la raquette Synscan la prise RJ45 c'est pour aller vers la monture, la prise RJ12 c'est une interface RS232 pour dialoguer avec un PC : MAIS ATTENTION CE N'EST PAS DIRECTEMENT DE L'USB !! 3) L'USB c'est du voltage entre e0 et 5V, le RS232 c'est entre -12V et +12V, donc avec un câblage en direct tu vas griller quelque chose... En plus du câblage il faut un composant (le contrôleur FTDI du câble proposé par @kaelig) qui va faire l'interface entre les niveau logiques de l'USB et du RS232 et le changement de voltage 4) Mais si tu souhaite vraiment réaliser un câble (et bousiller soit la raquette soit le contrôleur USB de ton PC), le schéma de câblage est décrit page 43 de la doc Synscan Skywatcher (Annexe III, fiche multi usage pour le RJ12) https://inter-static.skywatcher.com/upfiles/en_download_caty01379447698.pdf Cordialement
-
Bonjour, La version 3.6.8 de Kstars vient de sortir Pour le détail des évolutions voir ici: http://knro.blogspot.com/2023/12/kstars-368-is-released.html Cordialement
-
Bonsoir, 1) L'option "Limiter les magnitudes dans le menu "Affichage" / "Ciel" est une option globale, et tu peux choisir la valeur 2) L'option "Limiter automatiquement la magnitude" du plugin "Oculaires" ne s'applique qu'a la vue oculaire, et si elle est coché elle a priorité sur l'option globale. On ne peut pas choisir sa valeur, elle est calculée par le plugin en fonction de l'ouverture du télescope (pour un C14 cela va limiter à 15 environ) 3) Si en augmentant la valeur de magnitude tu ne voit pas plus d'étoiles (exemple pas de différence entre magnitude limitée à 12 et limitée à 15) c'est peut être que tu n'a pas installé les catalogues supplémentaires (il me semble que par défaut il y a les catalogues pour la magnitude visuelle qui sont pré-installés) Pour les installer il faut aller dans le menu "Configuration", onglet "Extras", il y a un bouton pour télécharger les catalogues d'étoile supplémentaires. Personnellement j'ai installé les catalogues jusqu'au niveau 7, donc pour les magnitudes jusqu'a 15 (mon Newton 10 pouces à une magnitude limite théorique de 14,7). Pour les étoiles de magnitudes entre 15 et 16.5 il faut ajouter le catalogue numéro 8 (cela ajoute 50 millions d'étoiles) ...etc... (au max il y a 9 niveau) Cordialement
-
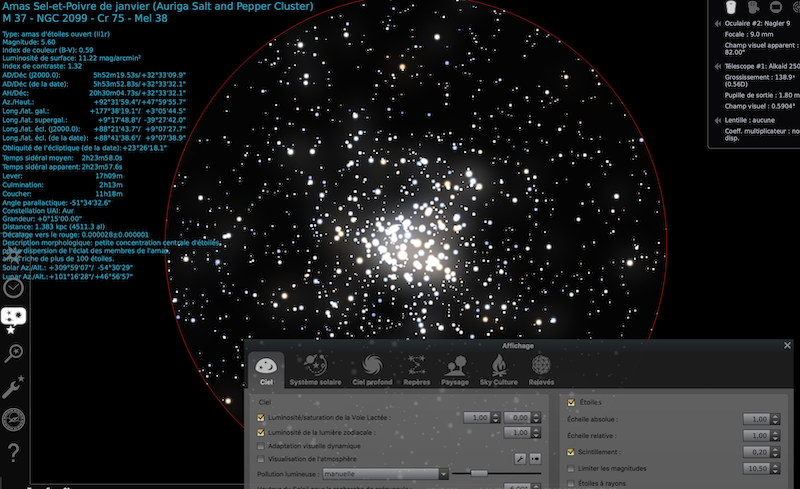
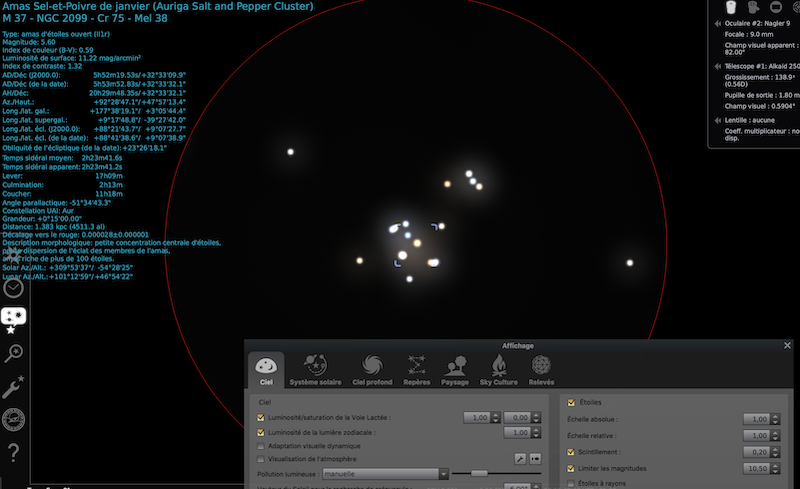
Bonjour, 1) je confirme que la différence viens bien de l'activation de l'option "limiter les magnitudes" Voici ce que j'obtiens avec une limitation de magnitude à 10.5 pour obtenir a peu près la même chose que toi (mon image est inversée haut bas par rapport à la tienne mais il y a a peu près autant d'étoiles) Si tu souhaite limiter la magnitude, alors limite la à 15.4 (et pas à 10.5) ce qui correspond à la magnitude limite d'un C14 (c'est la limite théorique, et il faut des conditions d'observations optimales pour cela, ce qui est rarement le cas). Et pour information, entre 10.5 et 15.4 il y a environ 5 magnitudes d'écart donc une différence de 100x plus ou moins lumineux (une étoile de magnitude 15 est 100 fois moins lumineuse qu'une magnitude 10) Et sans limitation de magnitude 2) quelque soient les paramètres dans stellarium, tu n'obtiendras jamais une simulation exacte de ce que tu verras dans un telescope... Cordialement
-
Montage vissé de préférence
keymlinux a répondu à un sujet de Forever_young dans Matériel astrophotographique
Bonjour. Cela existe, voir ici: https://www.pierro-astro.com/materiel-astronomique/accessoires-astronomie/accessoires-sct/adaptateur-coulant-50-80mm-vers-sct-2360_detail (Je donne le lien vers le site de Pierro mais cela devrais être dispo dans d'autres boutiques, à toi de voir) Ceci implique que tu n'utilise pas de réducteur et/ou aplanisseur, seulement ton DO et la bague T2 Et l'absence de filetage sur le PO te contraint de toute façon a ne pas avoir une solution totalement vissée (j'ai le même problème) Cordialement, Stephane -
@shibon A priori l'imageur n'est pas une camera spécialisée mais un APN (Pentax K70). L'asi178 c'est pour le guidage @Celebrinnar Je trouve le résultat très réussi (même si cela manque un peu de bleu comme l'a signalé @shibon) et c'est de loin bien meilleur que ce que j'ai obtenu sur cette cible 😉 , que je trouve difficile à imager. Bravo !
-
Bonjour. J'arrive à la télécharger, donc je pense que le problème est ailleurs. En plus d'être connecté avec son compte Webastro, il me semble qu'il faut aussi faire partie des membres du club "Linux et astronomie" En haut de la page, aller dans le menu "Forums" et sélectionner "Clubs". Une fois que la liste des clubs s'affiche, dans le pavé "Linux et astronomie" tu devrais voir un bouton "S'inscrire au club" . C'est gratuit et cela n'engage à rien... Cordialement, Stéphane
-
Bonjour Michel, A priori cet individu est suspect pour plusieurs membres du forum, déjà signalé sur le fil des possibles arnaques (je dit possible car parfois il ne s'agit pas d'arnaques mais d'utilisateurs un peu maladroit dans leur demandes...) Voir fil ci dessous qui est un sujet à suivre régulièrement... Cordialement, Stéphane
-
Attention : phishing et arnaques en cours
keymlinux a répondu à un sujet de Captain Flam dans Webastro
Le filtrage par adresse cela existe mais le problème c'est de fixer les critères pour ne pas bloquer des utilisateurs "normaux" Exemple: Faut t'il bannir tous les @IP utilisées par des providers africains sous prétexte que certains indélicats attaquent depuis là bsa ? Et on fait quoi pour les amateurs d'astronomie francophones en Afrique (et il y en a) qui en seront les victimes collatérales ? Certains providers français (dont Free) utilisent des adresse IP partagées (on peut avoir une adresse IP dynamique, qui change régulièrement, ou une adresse IP fixe partagée, ou bien une IP "full stack" pour soi tout seul). Bloquer un indélicat peut alors bloquer 3 autres utilisateurs de l'IP partagée De plus, avec la multiplication des VPN, rien n'empêche un hacker de l'autre bout du monde d'arriver avec une IP vue comme étant à Lille Bilan le filtrage par IP n'est malheureusement pas (ou plus) une solution -
Bonjour, Pour ceux qui suivent ce projet, je viens de modifier les fichiers STL et le code arduino pour cette roue à filtre Principaux changements: - Refonte graphique pour le site web embarqué et ajout d'un mode "nuit" (rouge/noir) - Ajout pilotage via driver Bluetooth Serie (testé OK sur Ekos/Indi) - Ajout pilotage via driver network (tcp port 1234)(testé OK sur Ekos/Indi) - Ajout capteur Hall + recherche automatique de la position du filtre 1 Les détails sont en bas du message initial que j'ai édité, en page 1 de ce fil Cordialement, Stéphane
-
3eme Festival d'Astronomie de Juvisy "Astr'Automne"
un évènement du calendrier a posté keymlinux dans Communauté
jusqu’àLe club Nova Astronomy Juvisy, en partenariat avec la Société Astronomique de France vous invite pour la 3ème édition de son Festival d'Astronomie "Astr'Automne" qui se tiendra du 17 au 19 novembre 2023, à Juvisy sur Orge, salles Pidoux et Varda (le cinéma de Juvisy). Entrée libre dans la limite des places disponibles https://saf-astronomie.fr/event/astrautomne-juvisy/ Le programme: -
Bonjour, Tu peux poster les dysfonctionnements constatés dans le fil suivant: Cordialement
-
(FINAL) Cycle de Céphée - Tome 2 - UN DOMAINE TOURMENTÉ (Mosaïque FSQ106 - ASI6200)
keymlinux a répondu à un sujet de Malik dans Astrophotographie
Astronomy Picture of the Day https://apod.nasa.gov/apod/astropix.html -
Quelle alimentation nomade utilisez-vous ?
keymlinux a répondu à un sujet de Michael Poirier dans Matériel général
Tu as tout a fait raison, passer de 12V à 22V pour ensuite avoir un transfo de PC qui passe du 22V au 19V cela n'est pas efficace Il existe des adaptateurs pour alimenter un PC sur du 12V qui transforment directement le 12V en 19V Exemple ici: https://www.amazon.fr/KFD-Chargeur-Universel-Ordinateur-connecteurs/dp/B07TCHPBDH/ref=asc_df_B07TCHPBDH/?tag=googshopfr-21&linkCode=df0&hvadid=603319141087&hvpos=&hvnetw=g&hvrand=9762040550708697006&hvpone=&hvptwo=&hvqmt=&hvdev=c&hvdvcmdl=&hvlocint=&hvlocphy=9056446&hvtargid=pla-814267322536&psc=1 Il faut juste trouver un modèle adapté à son PC avec le bon connecteur Personnellement j'utilise ce genre d'adaptateur pour alimenter mon macbook depuis la batterie 12V, et je confirme que 30Ah (soit 360Wh en 12V) c'est très insuffisant pour alimenter à la fois le setup astro et le PC/Macbook Par contre le modèle 100Ah que tu indique devrait couvrir le besoin, je devrais d'ailleurs prochainement remplacer ma batterie plomb 60Ah (donc 30Ah utilisable) par cette batterie lithium 100Ah (au moins 80 utilisables) Cordialement -
Quelle alimentation nomade utilisez-vous ?
keymlinux a répondu à un sujet de Michael Poirier dans Matériel général
Bonjour, 1) Personnellement j'utilise un bricolage perso avec boite à batterie, connecteurs/fusibles et batterie de bagnole, donc tout ce que tu ne souhaites plus (et je te comprend..), donc je ne vais pas te proposer ce genre de dispositifs 2) Par contre j'émets quelques doutes sur le matériel qui t'intéresse Par exemple, l'EcoFlow River2 256Wh Les specs: - Cela peut sortir du 12V continu max 8A ou du 220V alternatif max 300W - Capacité 256Wh Mon analyse: - 12V 8A c'est largement suffisant (en terme de puissance) pour alimenter tout ton matos astro et camera (tout sauf le PC portable donc) - 220V 300W c'est largement suffisant (ici aussi en terme de puissance) pour le PC portable (souvent alimenté avec un transfo 45W, 65W ou 90W) - Le vrai problème c'est la capacité (et pas la puissance), 256Wh, en 12V cela veut dire une capacité de 21Ah, dont tu ne pourra consommer que 80 ou 90% (avec une batterie lithium, bien mieux que les 50% d'une batterie au plomb), donc disons 18Ah consommable (85%), et donc si ton setup consomme 3A alors tu tiendras "seulement" 6h (La monture en mode suivi consomme peu, la camera cela va dépendre si elle est refroidie ou pas, ce qui va consoler le plus ce sont les resistances chauffantes), mais c'est 6h sans le PC portable. Un PC portable fourni avec par exemple une alimentation 65W (par exemple mon macbook), cela veut dire que dans les fait il consomme moins, disons qu'il consomme 30W en utilisation normale de pilotage du setup astro et acquisition photo, si on prend 12V comme référence cela fait du 2.5A Donc le setup astro + le PC cela consomme 3+2.5=5.5A, et avec une batterie de 18Ah utilisables tu tiendra 3,5h Avec le EcoFlow River 2 Max et ses 512Wh donc 42Ah en 12V (compter plutôt 36 Ah utiles) tu doublera la capacité et dont la durée de ton autonomie, mais cela sera t'il suffisant pour tes besoins Et je n'ai pas parlé de la perte d'efficacité lié au froid. Les nuits d'hiver sont les plus longues, ce sont celle où la durée d'autonomie est la plus importante, or ce sont aussi les plus froides et les batteries souffrent (plomb ou Lithium) Donc désolé, je ne t'amène pas de solution, mais si il y a autant d'astral qui bricolent eux même une boite a alimenter c'est peut être aussi parce que celles disponibles dans le commerce ne répondent pas entièrement à nos besoins. Cordialement EDIT: cela fait 2 jours que j'essaye de poster une réponse à ce sujet, avec un message d'erreur à la clé, à priori c'est OK depuis que la moderation l'a déplacé (mais pourquoi ?...)