keymlinux
-
Compteur de contenus
1003 -
Inscription
-
Dernière visite
-
Jours gagnés
5
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par keymlinux
-

(FINAL) Cycle de Céphée - Tome 2 - UN DOMAINE TOURMENTÉ (Mosaïque FSQ106 - ASI6200)
keymlinux a répondu à un sujet de Malik dans Astrophotographie
Avoir du bon matériel c'est une chose, l'exploiter en est une autre, et avec quel brio ! C'est magnifique. Bravo et merci pour le partage de cette photo qui mériterait l'APOD (tu devrais la soumettre si ce n'est pas déjà fait) Cordialement, Stéphane -
Bonjour, Je rencontre un problème nouveau j'arrive à consulter le site et les différents sujets, mais impossible de poster une réponse sur le fil suivant: J'obtiens le message Une idée ? EDIT: et vous noterez que je n'ai pas de problème pour répondre ici... EDIT2: depuis que la moderation a déplacé ce fil de discussion il semble que l'on peut désormais y répondre, je doute que l'on trouve un jour une explication technique...

-
Bonjour, Tout a fait. Le montage que je proposais entre l'APN et le telescope visait à faire de la photo "au foyer", ce que pratique la majorité d'entre nous ici, mais tu peux aussi faire de la digiscopie, à savoir metre l'APN derrière un oculaire (comme avec un smartphone), mais là je ne pourrais pas t'aider, car je ne pratique pas et je n'a aucune idée du type d'adaptateur nécessaire. Cordialement.
-
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
J'ai testé, cela corrige le problème. Merci. -
SIRILIC 1.15.12 pour SIRIL 1.2.3 ** Mise à jour **
keymlinux a répondu à un sujet de m27trognondepomme dans Logiciel SIRILIC de Siril et Sirilic
Bonjour, J'ai un soucis avec cette version 1.15.7 avec un projet en mode sessions LRGB (par contre pas de problème avec les projets DSLR mono ou multi sessions) Lors de la création du script j'ai les messages d'erreur suivants, et le script généré est incomplet: Traceback (most recent call last): File "/usr/local/lib/python3.10/site-packages/sirilic/lib/callbacks.py", line 959, in CB_BuildScript last_processed_image = builder.Build() File "/usr/local/lib/python3.10/site-packages/sirilic/lib/buildscript.py", line 412, in Build self.BuildScriptPart2() File "/usr/local/lib/python3.10/site-packages/sirilic/lib/buildscript.py", line 441, in BuildScriptPart2 last_processed_image_multi = script_multi.Build(self.script,self.arbre) File "/usr/local/lib/python3.10/site-packages/sirilic/lib/buildscript.py", line 873, in Build if layername == "R" : self.wplatesolveR = self.wplatesolve AttributeError: 'CMultisessionScript' object has no attribute 'wplatesolve'. Did you mean: 'platesolve'? A priori c'est lié aux derniers ajouts pour le platesolving Cordialement, Stephane -
Calcul position planètes: code d'exemple C/C++ optimisé arduino
keymlinux a répondu à un sujet de HPMâd dans Les bricoleurs
Tout a fait, mais je n'ai pas prétendu le contraire 😇, et çà passe bien sur un Arduino Mega, que j'ai utilisé et pas seulement pour les contraintes mémoires de la librairie Ephemeris, pour plein d'autres raisons dont le nombre de ports série (pour les modules gps et bluetooth), le nombre de ports gérant les interruptions (pour les encodeurs), etc... -
Calcul position planètes: code d'exemple C/C++ optimisé arduino
keymlinux a répondu à un sujet de HPMâd dans Les bricoleurs
Pour un projet de push-to perso j'avais utilisé la librairie arduino "Ephemeris" de @Mala voir ici https://github.com/MarScaper/ephemeris Cordialement -
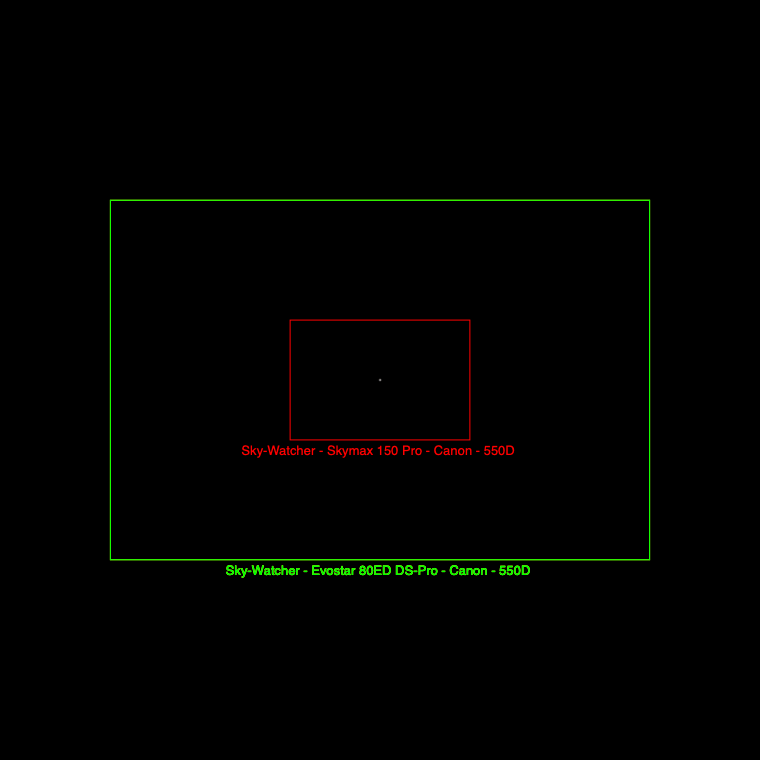
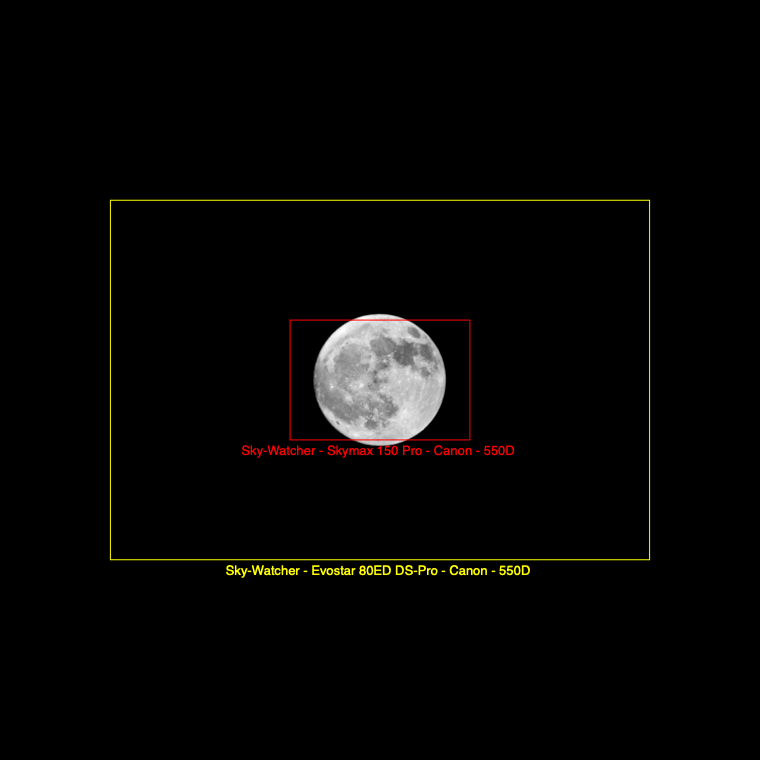
Bonjour, Pour adapter ton Canon sur un telescope tu auras besoin de 2 elements - une bague d'adaptation "Canon EOS - T2", à savoir une bague avec d'un coté une baÏonnette au format Canon et de l'autre un filetage T2 (M42x0.75 femelle), compter un peu moins de 20 euros, exemple ici https://www.pierro-astro.com/materiel-astronomique/accessoires-astronomie/accessoires-apn/bagues-canon-eos/bague-t2-pour-apn-canon-eos_detail - un adaptateur T2 - 1.25 pouces, à savoir un tube de diamètre 1.25pouces que tu glisseras dans le porte oculaire du telescope, doté d'un filetage T2 (M42x0.75) male qui sera vissé dans la bague précédente, ici aussi compter un peu moins de 20 euros, voir exemple ici https://www.pierro-astro.com/materiel-astronomique/accessoires-astronomie/accessoires-t2/adaptateur-photo-coulant-1-25-vers-t2_detail note: ce genre de matos est disponible dans toutes les boutiques astro Ta lunette 80ED est dotée d'un porte oculaire 2 pouces mais normalement tu devrais aussi avoir un adaptateur 2 pouces vers 1.25 pouces, donc la solution proposée ci dessus devrais fonctionner avec tes 2 telescopes Néanmoins, un tube 1.25 pouces pourrais causer du vignétage même sur un capteur APS-C, et il pourrais être intéressant de disposer aussi d'un adaptateur "T2 - 2 pouces" (qui ne pourra pas être utilisé avec le Mak, mais si tu as les 2 adaptateurs tu peux les visser dévisser en fonction du besoin) EDIT: en planétaire, le vignétage ne sera pas un problème, le passage au tube 2 pouces ne sera utile que si tu souhaite aussi faire de la photo de ciel profond avec des objets très étendus Attention, avec un smartphone derrière un oculaire tu pratique la "digiscopie", et tu profite du grossissement donné par le couple focale du tube et focale de l'oculaire. Mais avec un APN derrière un telescope, dans le montage proposé ci dessus, cela sera de la photo au foyer, et en mode planétaire avec le Mak pour la lune cela sera très bien, mais pour les autres planètes les objets seront petits sur la photo, sauf a utiliser une barlow Ci dessous un exemple de champ couvert sur la lune avec tes 2 telescopes Et sur Saturne (peu visible mais elle est bien là) Pour simuler le champs de ue en fonction du telescope, de l'oculaire ou imager, avec ou sans réducteur/barlow, voir ici https://astronomy.tools/calculators/field_of_view/ Cordialement
-
Stellarium : impossible d'afficher les satellites artificiels
keymlinux a répondu à un sujet de alpheratz06 dans Logiciels
Bonjour, Une fois le plugin activé (option "charger au démarrage" coché) et configuré (normalement les options par défaut suffisent) , pour afficher les satellites il faut utiliser la combinaison de touches Ctrl+Z (et Shift+Z pour afficher les noms, et Alt+Z pour afficher le panneau de config) note: sur un Mac, au lieu de Ctrl+Z c'est Cmd+Z Cordialement -
lunette 80ED interet de reducteur-correcteur x0,85
keymlinux a répondu à un sujet de berenthor dans Astrophotographie
Bonjour, Ton réducteur correcteur x0.85 skywatcher est visiblement le modèle SW0182, il dispose d'un filetage M56 femelle pour se fixer sur la lunette et d'un filetage M48 male coté imageur Tu aura donc besoin de la bague d'adaptation pour APN Canon vers M48 femelle, référence SW0189, qui fait justement 11mm d'épaisseur. Une trentaine d'euros en boutique astro. exemple ici: https://www.pierro-astro.com/materiel-astronomique/accessoires-astronomie/accessoires-apn/bagues-canon-eos/bague-t-m48-pour-canon-eos_detail EDIT: sur la photo que tu fournis on distingue un tube d'environ 20mm de long entre l'adaptateur EOS (qui lui semble bien faire 11mm) et le réducteur. Si ce tube se dévisse, et si c'est un bête tube allonge M48 male vers M48 femelle alors il suffit de l'enlever pour avoir le bon backfocus Si par contre il est solidaire et non démontable de l'adaptateur EOS, alors il faudra utiliser un autre adaptateur EOS (voir lien ci dessus) Cordialement -
Dérive de map avec la focale
keymlinux a répondu à un sujet de FalCT60 dans Matériel astrophotographique
Bonsoir. Merci pour les détails sur ton protocole de test. A priori avec la bague dédiée d'adaptation ASI vers Nikon on peut donc exclure un problème de distance de capteur. Même avec une bague dédiée, la grosse différence entre l'usage de l'objo avec ton APN et avec l'ASI c'est qu'avec l'APN l'objectif dispose d'une alimentation électrique et cela peut expliquer des différences de comportements en fonction des optimisations dont dispose (ou pas) ton objectif. Tu ne précise pas le modèle de ton objo 70-200 f2.8. Certains disposent d'une option de réduction de bougé (il me semble que chez Nikon ce sont les objo VR) --> des moteurs internes déplacent des blocs de lentilles pour contrer les mouvements --> en utilisation de ce genre d'objectifs avec une camera qui n'alimente pas l'objo je ne sait pas dans quel état de déplacement se trouvent les blocs de lentilles qui sont mobiles pour cette fonctionnalité --> cela pourrait expliquer la différence de map entre l'usage avec app et camera Un test qu'il serait possible de réaliser, c'est l'objo zoom avec l'apn, mais en mettant du scotch sur les contacteurs, pour que le boitier ne puisse pas piloter l'objo (comme la camera si qui ne peut le piloter), pour voir si l'objectif (et sa map) se comporte comme lorsque tu l'utilises avec la camera. -
Dérive de map avec la focale
keymlinux a répondu à un sujet de FalCT60 dans Matériel astrophotographique
Bonjour, Je vois 2 possibles problèmes 1) comme l'a dit @Fred_76 la distance entre l'objectif (la partie qui viens se poser sur le boitier) et le capteur doit être respectée, c'est 46,5mm pour la monture Nikon F. Comment as tu connecté ta camera avec ton objectif ? avec une bague d'adaptation faite pour ? avec un adaptateur fait maison en impression 3D (pas un problème en soi, mais il faut être sûr des dimensions pour la distance objo-capteur) 2) Sur certains objectifs la mise au point n'est pas mécanique mais électrique, et si l'objo n'est pas connecté à un APN cela ne marche pas. Je ne connait pas les apn/objo Nikon, mais c'est à vérifier aussi Cordialement -
Question sur le calcul de l'offset synthétique
keymlinux a répondu à un sujet de rmor51 dans Logiciel SIRIL de Siril et Sirilic
Bonjour Robert, Il me semble que tout est expliqué ici https://siril.org/tutorials/synthetic-biases/ A la fois comment determiner le "multiplicateur" mais aussi comment l'utiliser dans Siril (voir le paragraphe "And now what ?") Si comme moi tu utilises Sirilic (et si ce n'est pas le cas tu devrais essayer, cela simplifie la vie) , il suffit au niveau de la liste des fichiers "bias" de faire "edit" et de mettre "=X*$OFFSET", avec X le multiplicateur déterminé Cordialement, Stéphane -
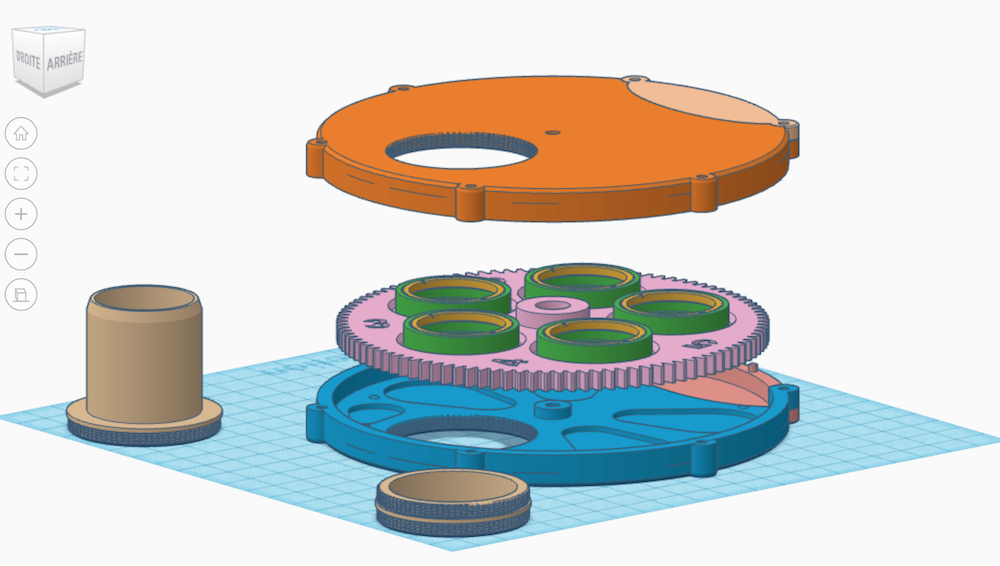
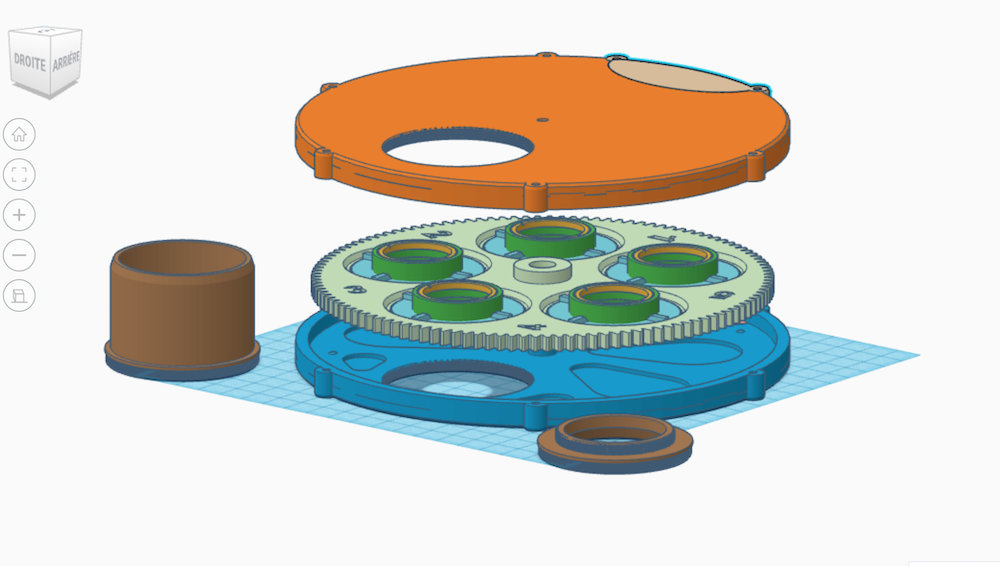
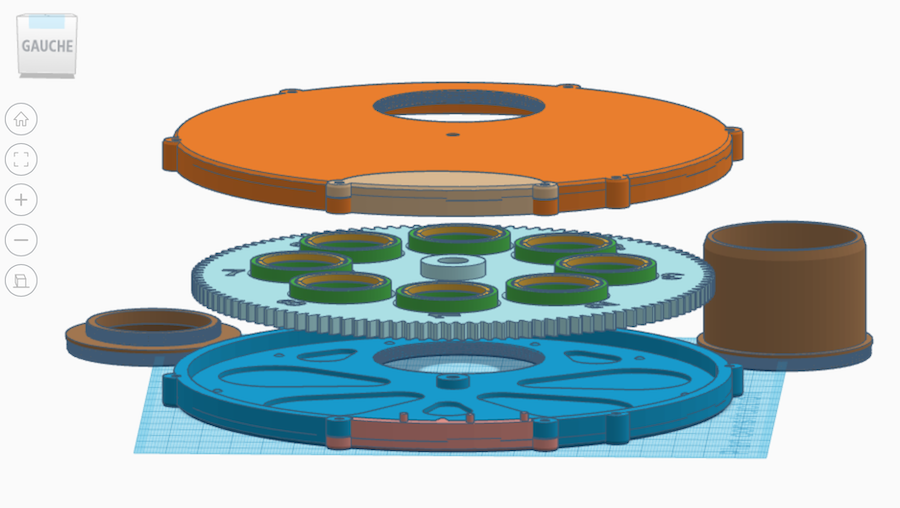
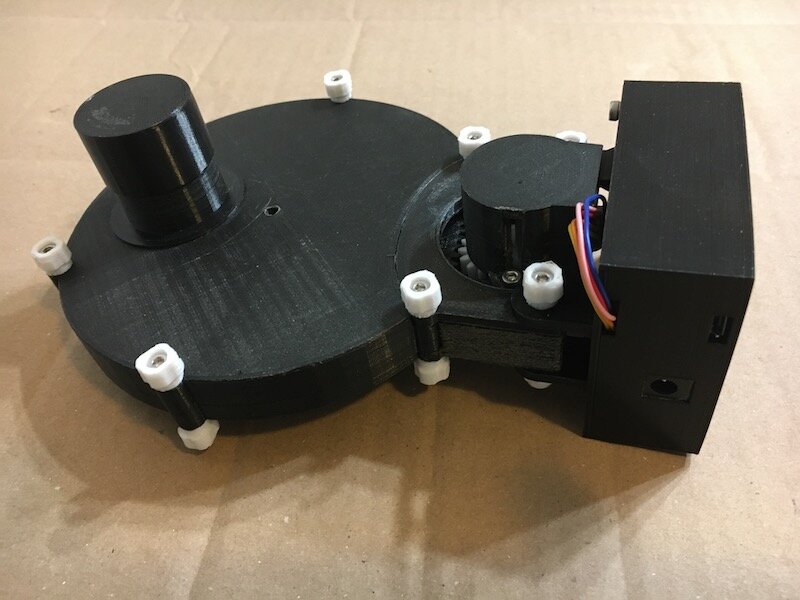
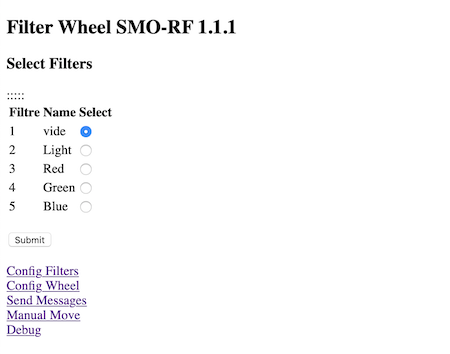
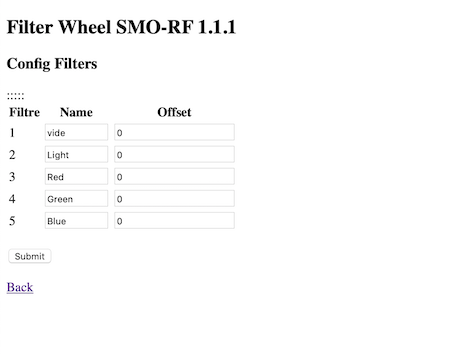
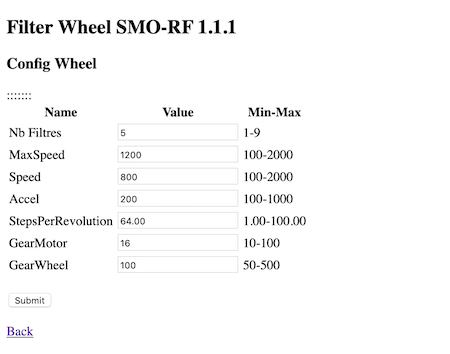
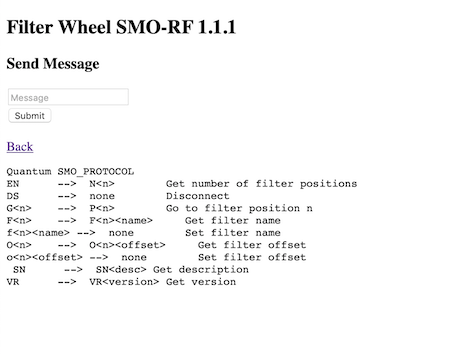
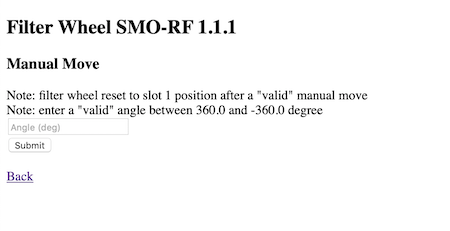
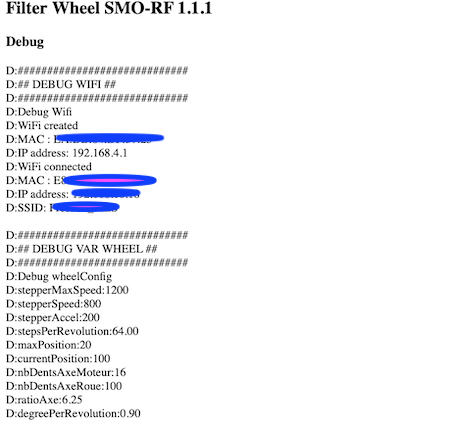
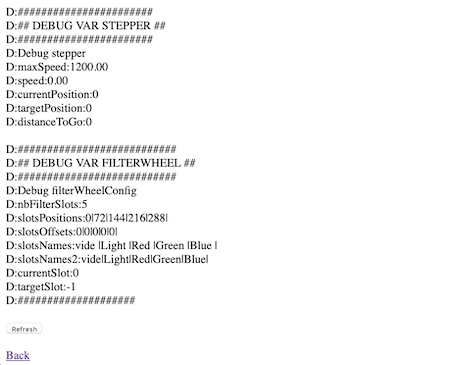
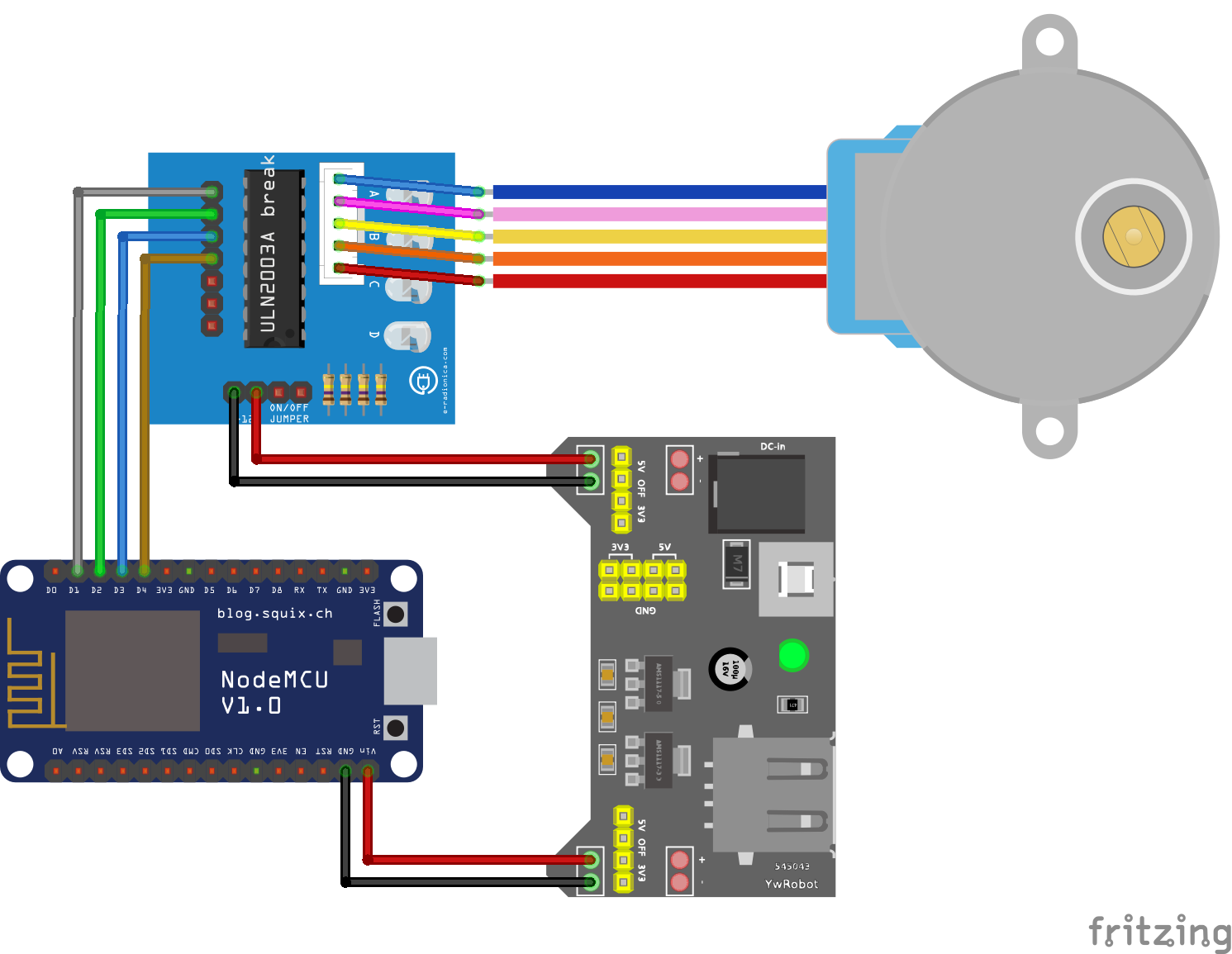
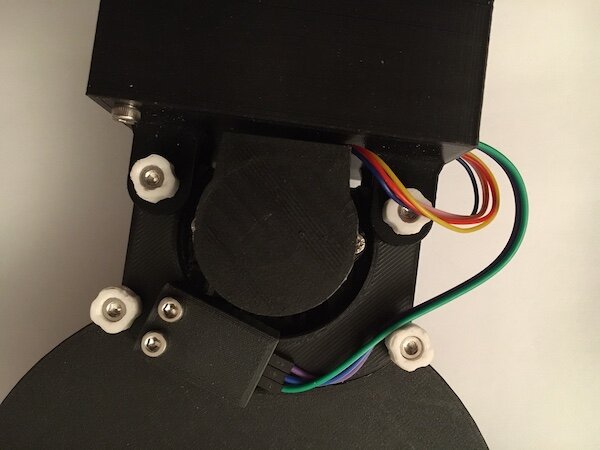
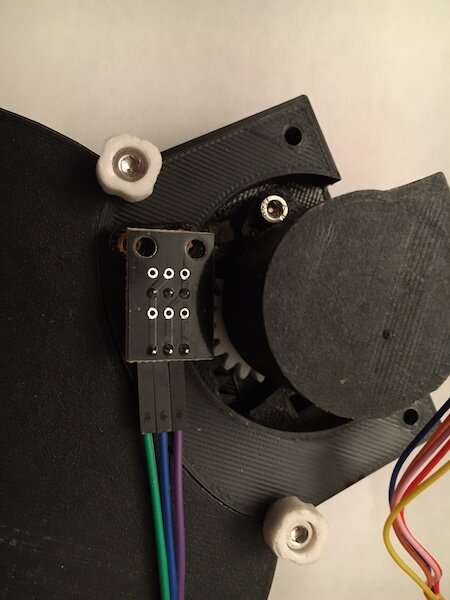
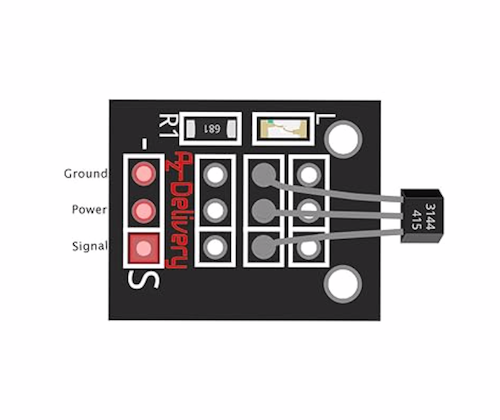
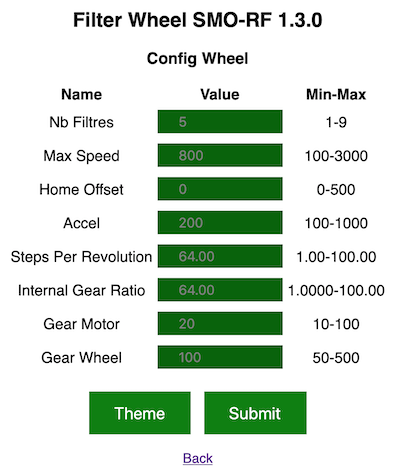
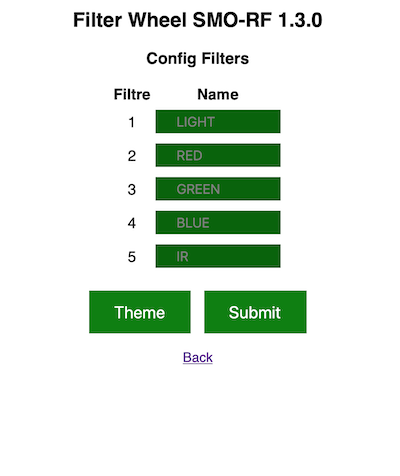
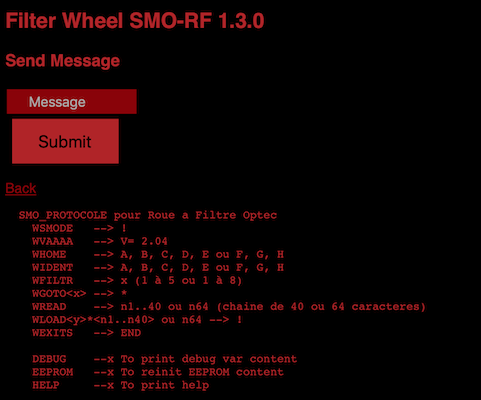
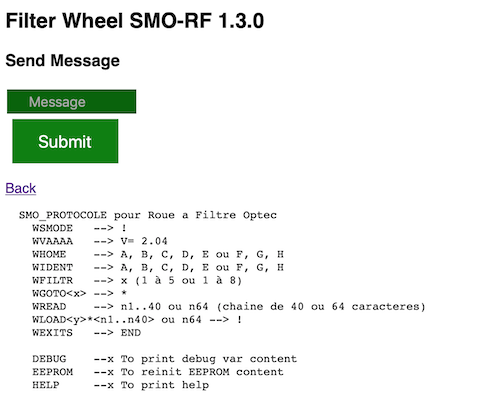
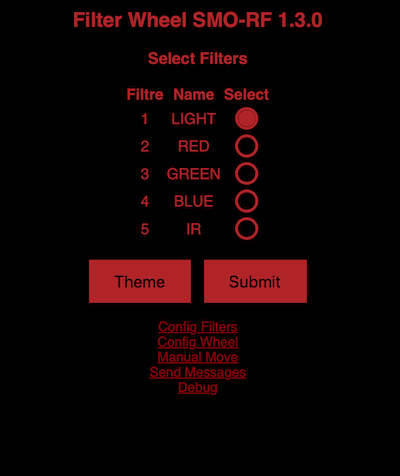
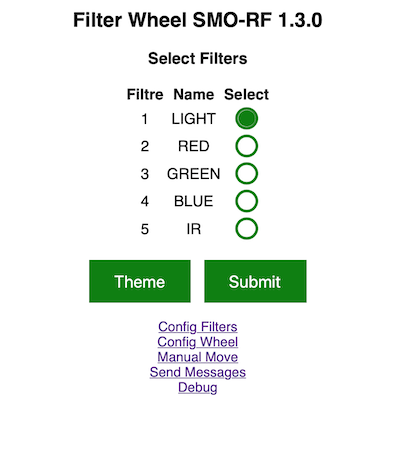
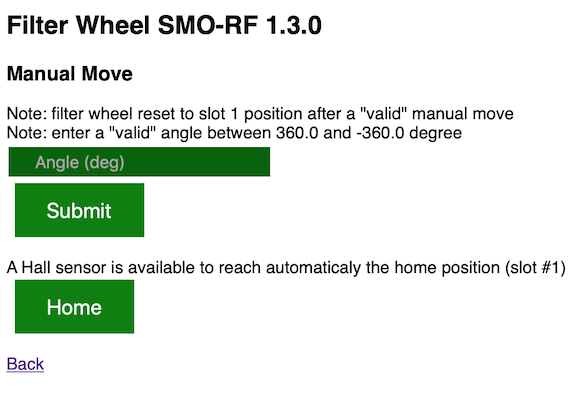
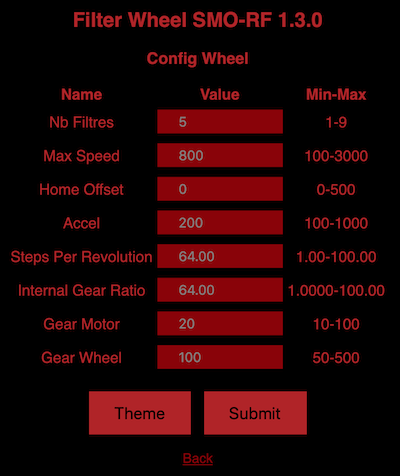
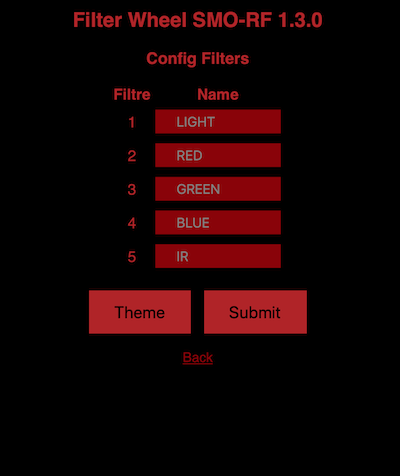
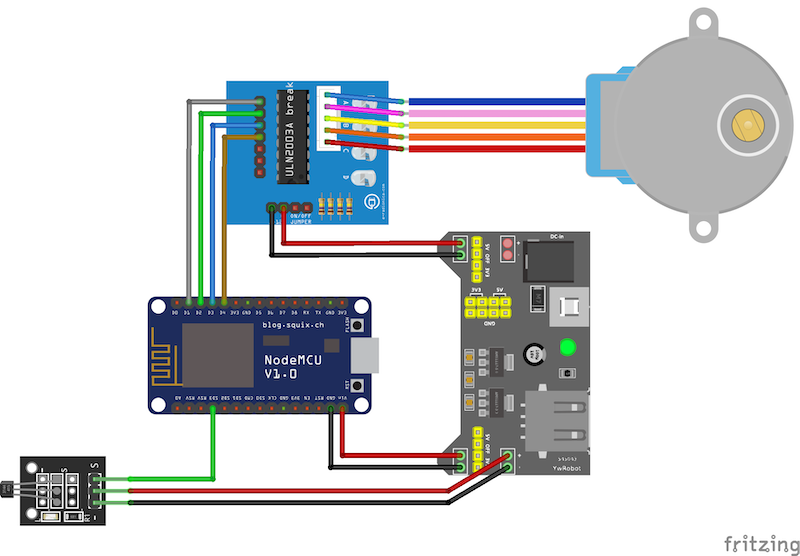
Bonjour, Je viens de poster dans les clubs "L'impression 3D en astronomie" et "Astronomie avec Arduino" les éléments nécessaires à la réalisation d'une roue a filtres imprimée en 3D, manuelle ou motorisée Chapitre 1: Les photos du bricolage Voici des photos de la version RF-42 5x1.25 pouces avec motorisation que j'utilise régulièrement (pilotée via Kstars/Ekos/Indi,la roue implémente le protocole des roues Quantum) En version manuelle, avec une petite trappe pour accéder à la roue et la faire tourner Le support moteur En version motorisée, la trappe est remplacée par le support moteur En version motorisée avec le boitier d contrôle (1 port 12V DC pour l'alimentation du moteur, un port USB micro pour le pilotage série) Une vue des différents éléments avant montage de la roue Une vue des elements de la motorisation Chapitre 2: Les modèles 3D Il y a 2 modèles, avec 3 déclinaison en tout 1) Le petit modèle, une seule déclinaison pour 5 filtres 1.25 pouces Le boitier dispose de filetages M42x0.75 m sur chaque face 2) Le grand modèle, avec 2 déclinaisons, soit pour 5 filtre d e3 pouces, soit pour 8 filtres de 1.25 pouces Le boitier dispose de filetages M54x0.75 M sur chaque face Les fichiers pour l'impression 3D des roues ) filtres sont disponibles ici Chacun des 2 modèles peut être actionné manuellement, ou doté d'une motorisation Pour l'impression en 3D des supports moteurs et du boitier de contrôle, c'est ici EDIT: ajout des fichiers STL pour les têtes de vis et boulons, pour manipuler les vis sans outils Tete vis et boulons.zip Important: les têtes de vis sont une création originale de Xavier DUPONT pour le projet SOLEX, les têtes de boulons sont une adaptation personnelle des têtes de vis. Chapitre 3: Motorisation, code de programmation et interface de pilotage Pour la motorisation vous aurez besoin d'un microcontroleur ESP8266 ou ESP32, d'un moteur 28BYJ-48 et de son stepper UNL2003 (le tout devrais vous couter moins de 20 euros). Le code est fourni ici (mis à jour version 1.1.1 le 19/10/2021) La roue est pilotable via le port USB du contrôleur, elle implémenta par défaut le protocole des roues à filtres Quantum --> a ce titre la roue a filtres est pilotable via Kstars/Ekos/Indi en utilisant ce driver INDI Avec un microcontroleur ESP8266 ou ESP32 (en lieu et place d'un Arduino tout simple), la roue a filtre généralement!re son propre réseau Wifi (comme une borne) SSID réseau: : mls-rf password: azerty adresse IP de la roue: 10.42.0.1 joignable en interface web: http://10.42.0.1 En parallèle du mode "borne" la roue peut aussi se connecter à un réseau wifi existant, vous pouvez modifier dans le code les éléments "reseau1", "password1", "reseau2" et "password2", la roue a filtre se connectera à l'un de ces 2 réseaux, au premier qui accepte la connexion, testés dans l'ordre... Voici quelques copies d'écran du pilotage en mode wifi (désolé j'ai l'habitude de programmer en anglais, comme au boulot, même si mon niveau d'anglais est mauvais ...) L'écran principal, on choisi le filtre et on valide (submit), la validation entraine le déclenchement du mouvement pour positionner le filtre choisi (les noms des filtres peut être modifié sur l'écran de config) Ci dessous l'écran de configuration pour nommer les filtres et leur attribuer un décalage (offset), qui sera utilisé par Ekos/Indi pour ajouter la mise au point selon chaque filtre Ci dessous la page de configuration Détail des paramètres: - nombre de filtres: accepte les valeurs de 1 à 9, mais en fait on utilise soit 5 soir 8 filtres - nombre de "pas par minutes" max lors de la rotation du moteur - nombre de "pas par minutes" initial au but de la rotation du moteur - nombre de "pas" pour le facteur d'acceleration (utilisation de la librairie AccelStepper) - nombre de pas pour faire un tour de moteur (habituellement avec un moteur 28BYJ-48 c'est 64) - nombre de dents de l'engrenage sur l'axe moteur (20) - nombre de dents sur le tour de la roue (100 pour le petit modèle, 120 pour le grand modele) Ci dessous la page pour envoyer manuellement des commandes (celles qui sont habituellement envoyées par le port série, pratique pour tester) TRES IMPORTANT: comme la roue a filtre ne dispose pas de mécanisme de "repositionnement automatique", si il y a désynchronisation, avec le roue qui s'arrête sur une position entre 2 filtres, l'ecran de mouvement manuel permet des ajustement en faisant tourner la roue (on choisi le nombre de degrés, en valeur positive ou négative selon le sens que l'on souhaite Et pour finir il y a une page "debug" qui présente les valeurs en cours des différentes variables du firmware Cordialement, Stéphane Edit 19/10/2021: suppression des images en doublon, mise à jour des copies d'écran du pilotage de la roue via son interface web Edit 23/11/2021: modification du schéma de câblage, livraison code microcontroleur v1.2.0 VERSION1.3 du 06/11/2023 Edit 06/11/2023: ajout d'une nouvelle pièce 3D "support haut hall" permettant d'ajouter un capteur a effet haut et livraison code microcontroleur v1.3.0 qui l'exploite Motifs sur le code: - Refonte graphique pour le site web embarqué et ajout d'un mode "nuit" (rouge/noir) - Ajout pilotage via driver Bluetooth Serie (testé OK sur Ekos/Indi) - Ajout pilotage via driver network (tcp port 1234)(testé OK sur Ekos/Indi) - Ajout capteur Hall + recherche automatique de la position du filtre 1 IMPORTANT: si vous avez déjà imprimé la version précédente de la roue et du support moteur vous n'avez pas besoin de tout réimprimer, vous devez seulement imprimer la pièce "support haut hall" (et éventuellement le "capot hall" pour protéger le capteur) Quelques images: Le support du capteur Hall (piece seule, et pièce installée sur la roue avec le capteur) Le support avec le capteur et son capot de protection Le type de capteur est un AZDelivery KF-035 (environ 7 euros les 3 capteurs sur la Zone....) Important: ce capteur dispose d'une LED qui éclaire en rouge, il est important de la masquer pour ne pas produire de lumière indésirable dans la roue à filtre ! Avec un contrôleur ESP8266 ou un ESP32 la roue peut être connectée en Wifi et pilotée via un site HTTP intégré La version 1.3.0 entraine une refonte graphique du site embarqué, voici quelques captures d'écran (le theme Dark est par défaut, mais on peut permuter avec le thème Light à la volée): Le nouveau plan de câblage avec le capteur Hall (dans le code on considère qu'il est connecté sur le port GPIO16, mais c'est configurable) Cordialement, Stéphane
- 32 réponses
-
- 13
-