gehelem
-
Compteur de contenus
6359 -
Inscription
-
Dernière visite
-
Jours gagnés
12
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par gehelem
-
ah c'est sympa, merci beaucoup ! je comptais faire la même chose tu m'as devancé, et c'est très bien (+mon Teenastro chauffe en ce moment, c'est vraiment de la balle)
-
erreur de ma part les pulses sont effectivement envoyés à la monture, mais la réponse du driver me semble bizarre il répond tout de suite "OK" sans attendre que le mouvement soit terminé Sauf erreur, ce n'est pas comme ça que c'est fait sur le driver EQMOd (par exemple), qui envoie "busy" en cours de mouvement, puis "OK" lorsque c'est terminé... Du coup je me demande bien comment PHD (et ses copains) fait pour s'en sortir avec ça, franchement je pige pas
-
(Tiens je profite qu'il y a du passage) j'ai un petit souci avec le pulse guide sur linux, résumons comme ceci : monture déparkée, suivi enclenché. connexion directe en USB je fais manuellement une demande de pulse de 5 secondes à l'ouest comme ceci : la propriété se met tout de suite en statut "OK" (vert) et la monture ne bouge pas d'un poil. Soit j'ai loupé un truc à faire, soit il y a un problème. Je dirais que le driver indi n'est pas en cause, car avec mes petits jouets à moi ça fait pareil : j'envoie une demande de pulse qui est acquittée immédiatement sans réaction physique de la monture J'ai peut-être un zinzin dans mon paramétrage, mais je n'ai rien trouvé qui cloche ... Versions : des idées ?? (merci d'avance) Edit : j'ajoute que j'exclue absolument de guider en ST4, je ne veux même pas en entendre parler (parce que oui, je guide sans caméra de guidage, c'est une autre affaire)

-
Camera CCD fabriqué maison "CAM86"
gehelem a répondu à un sujet de pagpatrice dans Matériel astrophotographique
Exactement pareil. Mais en fait c'est pas grave parce que finalement on aime ça. (Intervention inutile, scusez moi) -
J'ai joué encore un peu avec le focus, j'ai ajouté le "multizone" pour voir le tilt comme le hocusfocus : je peux même le faire en 3x3 ou NxN On verra ce que ca donne quand il se remettra à faire beau... Je me suis fait un petit setup tout exprès, manque juste le focuser, c'est couillon...
-
Excellent, magnifique, etc...
-
Présentation de Sevun Astro, le télescope évolutif, ce mercredi 6 avril 2022 à 21 h sur Discord.
gehelem a répondu à un sujet de Ron dans Les bricoleurs
Je confirme @Ron quelques autres et moi même sommes à l'initiative de ce post. -
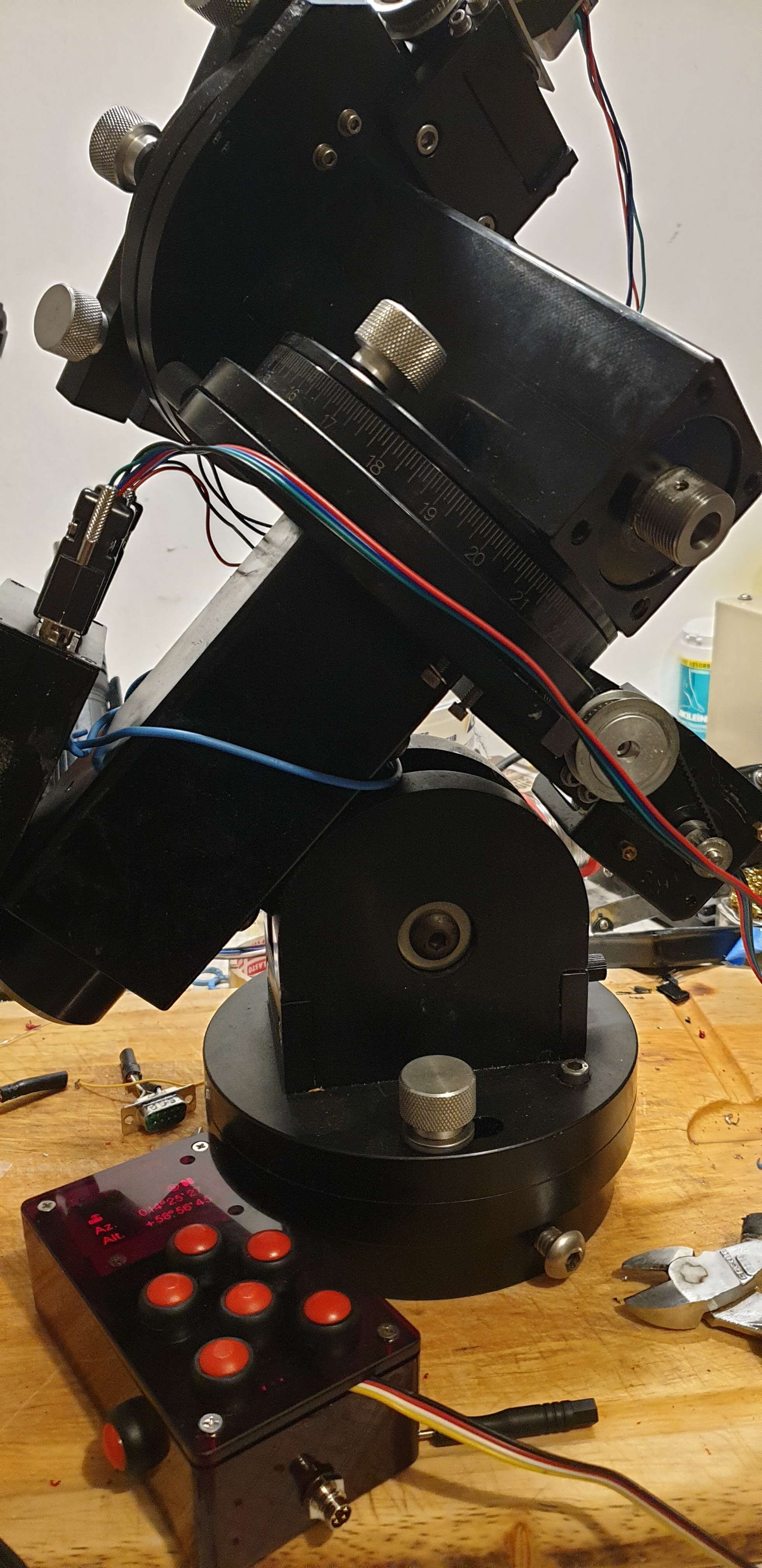
Un an et demi plus tard... Je me suis décidé à câbler la raquette Teenastro avec le beau boitier rouge ça déchire j'ai juste raté de commander la bonne embase, j'attends que ça arrive
-
Dites, virgule, à propos d'éclairage, j'aimerais bien qu'on s'amuse un peu avec ceci (et un tout petit peu d'argent public, aussi) : https://www.glowee.com/
-
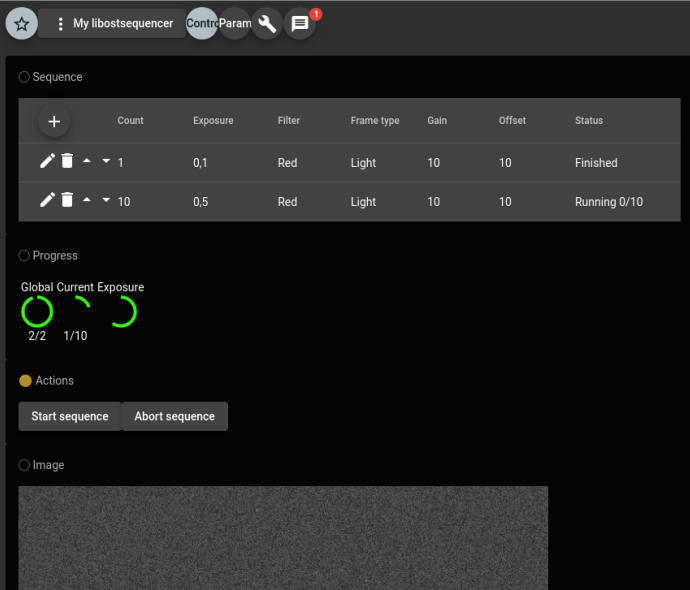
En vert c'est mieux, et dans une vraie fonction c'est encore mieux (ici le sequenceur) Allez, du coup je vais aller tondre la pelouse sinon je faire me faire chauffer les oreilles
-
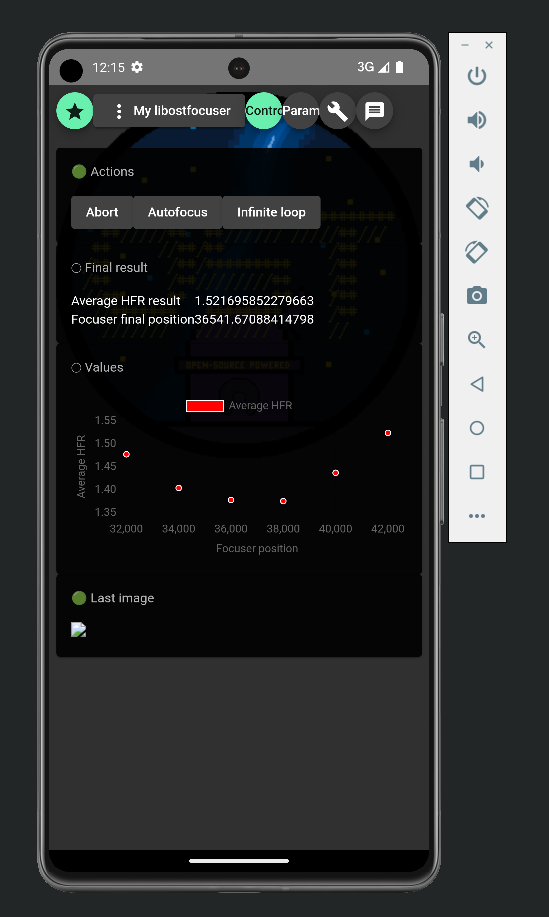
J'ai mis (allez) environ deux heures à ajouter ces magnifiques camemberts avec tout qui va bien pour les utiliser, youhou ! **Mais** Je mets 10x plus de temps à les passer en vert, parce que le vert c'est mieux que ça me gooooonfle ! (accessoirement je n'y arrive pas)
-
Quelques images rigolotes ou étranges... bis !
gehelem a répondu à un sujet de RIGEL33 dans On fait une pause
-
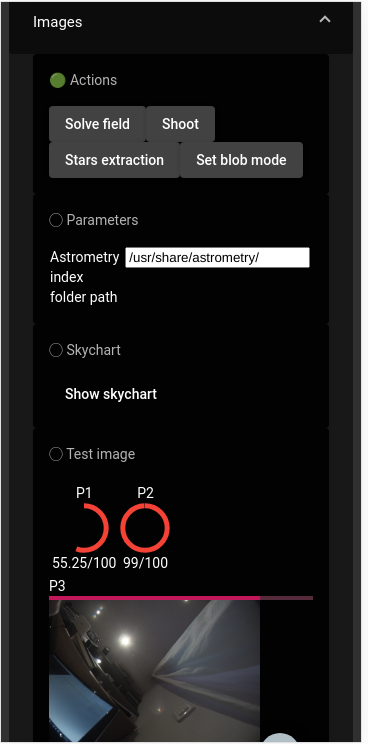
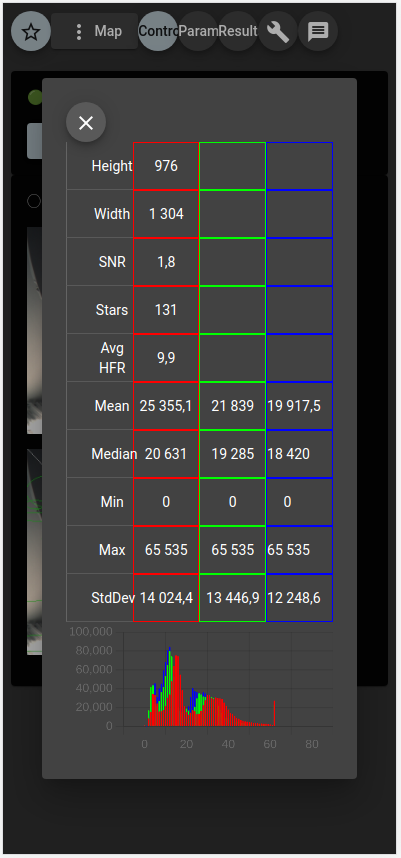
Je m'amuse comme un petit fou en ce moment, j'ajoute plein de trucs. par exemple j'ai harmonisé la gestion des images, pour éviter de répéter du code intéressant dans chaque module en particulier les statistiques sur les images et les histogrammes : L'apparence est perfectible, mais c'est vraiment très pratique 😉 Il faudrait ici que j'ajuste l'échelle, work in progress comme d'habitude
-
Non, vendu au grand chef @supaii Qui s'en est sorti admirablement
-
Pas de géant hier soir, j'ai réussi à builder mon front en app android ! Je suis tout fou...
-
ça devient de plus en plus subtil : Je suis allé vérifier, ma bouilloire à moi qui est dans ma cuisine est donnée pour 1850W Et ça a l'air d'être une valeur plutôt basse (c'est entre 2000 et 3000 chez Dartylanger) Donc, en admettant qu'on néglige la partie convertisseur 12v/220 je ne peux déjà pas utiliser cette merveilleuse batterie pour faire chauffer ma bouilloire comme sur le joli dessin, vu qu'on me dit 600W pas plus. Mais bon, passons. Maintenant le convertisseur. Sous réserve de savoir ce qu'il a vraiment dans la ventre, donnons lui un rendement de 65% (ce qui a l'air d'être courant) Des 299Wh que j'ai acheté, il me reste 299*0.65 =~200Wh. C'te farce : Ma bouilloire à 2000W pourra bouilloirer pendant ... 200/2000 = 0,1h et donc ... 6 minutes !! Moi j'ai rien contre l'appareil en lui même, hein. C'est le marketing qui me fait hurler, c'est épuisant. Heureusement qu'ils ont pensé à nous mettre un peu de perlinpinpin bleu dedans, sinon j'y aurais pas cru. Bon après pour nos usages pourquoi pas, mais ça ne sert à rien de claquer 300 boules là dedans pour avoir des trucs inutiles. Autant aller chercher les Eco-Worthy de l'ami @Colmic qui sont en promo en ce moment Pour le même prix tu as une 100Ah (1200Wh, oui oui) Ah, mais par contre elles sont vendues sans perlinpinpin bleu 😉 G.
-
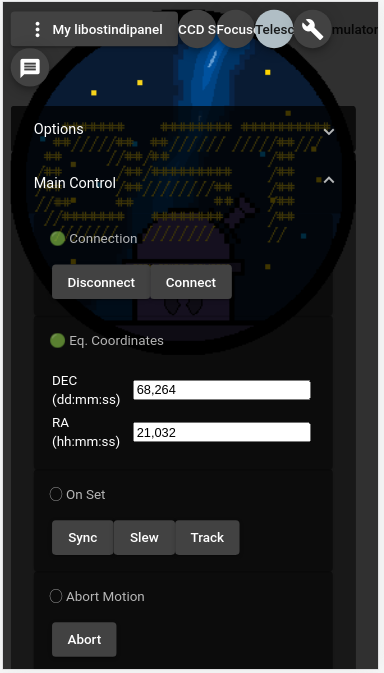
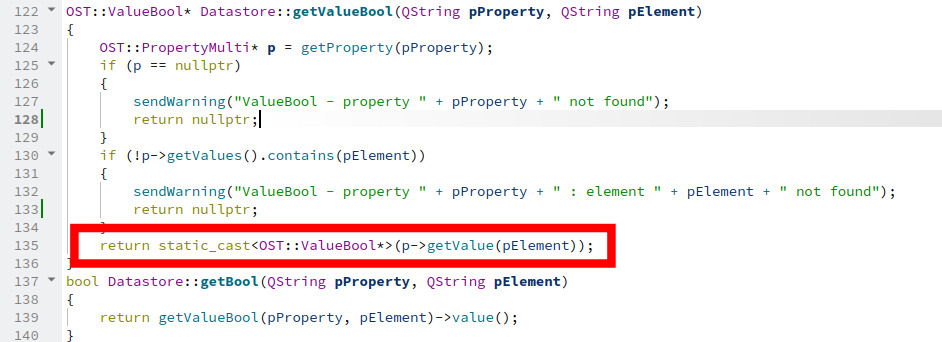
oui, bon, 20 avril : ok j'avais besoin d'un break à un moment, il faut laisser la réflexion réfléchir. Je m'y suis remis concrètement après avoir acté de la chose suivante : Mon système de déclaration des propriétés était trop ouvert, j'abusais du "QVariant" de Qt qui peut contenir à peu près tout et n'importe quoi. C'était facile, ça marchait bien, mais c'était dégueulasse. Donc j'ai décidé de remettre une pièce sur le fameux modèle de conception proposé par @deufrai Et ça m'a fait un mal de crâne pas possible, au point que figurez vous que j'ai chopé le Covid. Même pour les maladies je suis has-been, je ne l'avais pas encore eu. Bref. Donc ce modèle de conception s'appelle "Visitor Pattern", je pense que j'ai pigé comment le monter et l'utiliser, et donc je me suis remis à coder. Autant dire que j'en ai coupé des cochonneries. Mais va savoir: si ça se trouve je les ai remplacées par d'autres encore pires : Par exemple pour faciliter l'écriture des modules, je fais de temps en temps du "static_cast" Je sais c'est mal, j'y travaille. J'en ai aussi profité pour revoir un peu la philosophie de certaines propriétés, en particulier les images. Pour le moment c'est embryonnaire mais ça fonctionne. Donc après cet immense travail de refonte je dois réadapter l'écriture de mes fameux modules. J'ai commencé par le panneau de contrôle Indi, et ça me semble bien vouloir fonctionner correctement. L'apparence est strictement identique, rien de neuf à voir ce n'est que la partie visible 🙂 J'ai relancé les builds sur le Launchpad Ubuntu pour voir si ça se comporte correctement, parce que j'ai ajouté pas mal de nouveaux dossiers j'ai un doute. A+ G.
-
Allons allons, on est pas non plus au tribunal, aucun problème 😉 Ton module est intéressant, mais à priori il ne fera pas le job : le moteur tourne de façon continue si je comprends bien, avec un bouton marche/arrêt (+ réglage de la vitesse) Pour un focuser ça ne sera pas très pratique, voir inutilisable En tout cas n'hésite pas à poser des questions ou à nous faire suivre ton avancement sur ton projet A+ G.
-
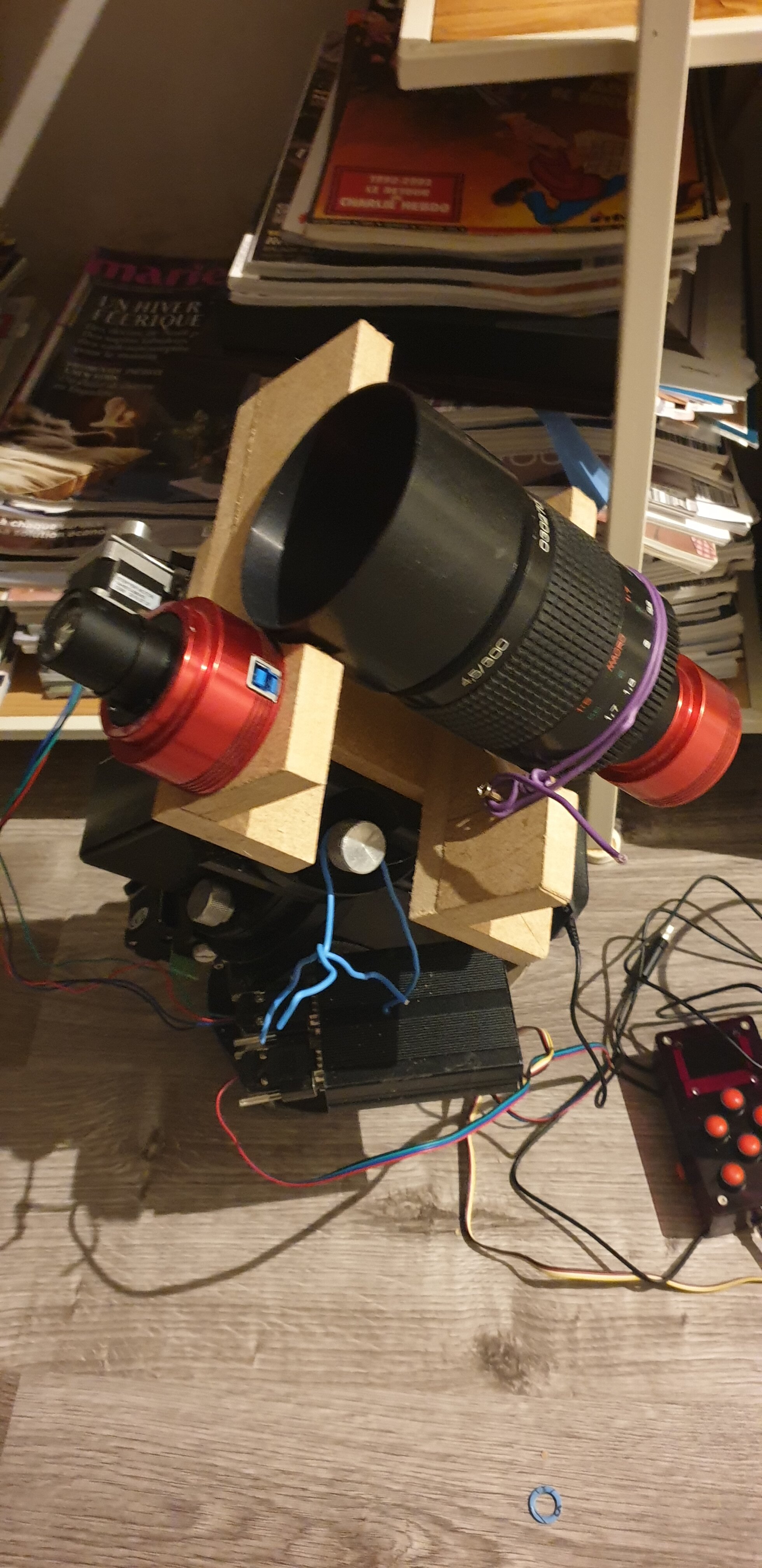
Hello ça faisait longtemps qu'un astram bricoleur m'avait soufflé cette combine, je ne l'avais jamais mise en oeuvre mais comme ça intéressait quelques comparses j'ai un peu investi. Le principe c'est de commander le moteur pas à pas de nos focuseurs avec "juste" un encodeur optique. Le signal en quadrature qu'il génère peut être relié directement aux commandes STEP et DIR de n'importe quel driver de moteur CNC Voici ce que ça donne : L'investissement est ridicule (moins de 50€), et le montage vraiment pas compliqué en utilisant des petites cartes qu'on trouve très facilement. Je me suis arrêté sur le driver TMC2208 car ses pins de configuration permettent de jouer sur la multiplication/démultiplication du mouvement (les autres drivers le permettent aussi, mais avec celui là ça facilite les choses avec la petite carte que j'ai choisie) L'encodeur optique fait ici 800 pulsations/tour, et le moteur est un 400 pas/tour En gros il y a une alim qui permet d'obtenir du 5v pour alimenter l'encodeur optique et la partie logique du driver, et une carte de support de driver TMC. Sur la vidéo je n'ai pas monté de switch pour activer/désactiver le moteur ("EN" sur le driver) Mais l'idée est de mettre ce switch quelque part sur le corps de l'encodeur pour l'avoir en main. Il permettra de ne pas tirer sur la batterie lorsqu'on ne touche à rien. Inversement, on peut envisager de le laisser en prise pour garantir que le focuseur ne glisse pas. La destination du truc c'est surtout pour les visuelleux, car il n'y a évidement pas de commande par PC, ou alors les photographes qui font le focus à la main. Le seul apport nouveau à ma connaissance c'est la fluidité du mouvement, c'est beaucoup plus naturel à utiliser que les boutons +/- qu'on trouve par ailleurs. Si ça vous intéresse je peux donner quelques détails plus précis / photos La seule grosse combine c'est de mettre des résistances de pullup sur les sorties de l'encodeur. Bien sur là c'est sur mon bureau, c'est en général là que je m'arrête. Mais on va essayer d'aller au bout du truc cette fois. Gilles.
- 113 réponses
-
- 15
-

-

-
Bonjour mesdames, bonjour mesdemoiselles, bonjour messieurs. Je m'explique. C'est d'abord une marotte qui me fait gamberger et c'est sans doute la raison la plus importante. C'est ensuite une réflexion toute personnelle -aussi- basée sur ma propre pratique bizarre de l'astrophoto Voilà, en gros je trouve complètement superflu de laisser tourner un planétarium ou autre truc orchestrateur (SGP...) et tout ce qui tourne autour pendant toute une session alors qu'il ne sert qu'à deux moments : - la mise en place et l'ajustement des paramètres (mise en station, focus, pointage ...) - la surveillance On va dire que 95% du temps on a une interface graphique qui bouffe des ressources et de la batterie pour rien. (aucune idée de la réelle empreinte que ça a, m'enfin quand même...) Kstars/Ekos et leurs acolytes sont des outils superbes, mais il faut bien se résoudre à avouer que sur un petit Raspberry ça bagotte quand même de temps en temps. Et au prix de la nuit potable, ça commence à faire ch..r. DONC: ça fait quelques semaines que je farfouille un peu partout, et que mon cerveau bout. Il y a les solutions commerciales, type AsiAir ça fait vraiment envie, mais ça manque de fun ces trucs qui marchent tout de suite, là. Ensuite nous avons deux candidats que je trouve exceptionnels - Mobindi de @pludov - AstroPhotoPlus https://astrophotoplus.gulinux.net/ Je fais joujou avec les deux, j'adore. Un seul reproche : Les deux sous traitent la partie autoguidage à un PHD2 qui tourne en cachette Adieu la notion de headless Et puis coté architecture, je pense que ce type de choix augmente le risque de plantage en ajoutant des intermédiaires. Et de fait : je n'ai jamais pu les utiliser en vrai, j'ai toujours eu un truc qui fouarre. Attention, hein, critiquons le bonhome (moi) qui veut bien bidouiller mais pas trop se donner de mal avec ses gros doigts. Autre reproche pour AstroPhotoPlus : pas d'autofocus Rédhibitoire pour moi. Moi je veux appuyer sur un bouton. Bref. Je compte consigner ici mes petites tergiversations, et en particuleir celle qui me travaille depuis aussi depuis semaines. Ma petite contribution à moi. Encore très tôt, et rien de partageable, mais allons-y : Il existe un driver indi nommé "Agent Imager". ça a été la révélation pour moi, ça rentre vraiment pil poil dans ce que je voudrais. Que fait-il ? C'est un driver indi bidon, qui "snoop" un CCD et une roue à filtres On lui programme des séquences, et hop roule ma poule : Tout se passe coté driver, plus besoin de laisser allumé quoi que ce soi, sans fioriture. Et pourquoi il me plait encore plus ? Parce que c'est du C++, et rien d'autre : J'ai essayé de comprendre le fonctionnement de Mobindi et AstrophotoPlus : Python, NodeJS, C'est merveilleux, mais laaaaaargement trop loin de mes compétences en tambouille. Donc en C++ je ne dis pas que je m'y connais, mais au moins que ça discrimine un peu le truc pour mes neurones de 47 piges. Et j'y suis allé de mes petits essais, je commence à piger comment ça marche. L'idée serait d'y aller petit à petit : un agent focuser en premier : ça permettrait de l'utiliser sur Astrophotoplus en palliatif (je suis dessus là 🙂 ) ensuite tout le reste : - agent alignement - agent guideur - etc.. Autant l'alignement et le focus je pense que c'est facilement jouable, autant le guideur ça va être coton. PHD2 est déjà loin devant, mais il est extrêmement difficile de repiquer le code. Bref, c'est le début d'un fil que j’espère au long cours, n'hésitez pas à participer. Gilles.
-
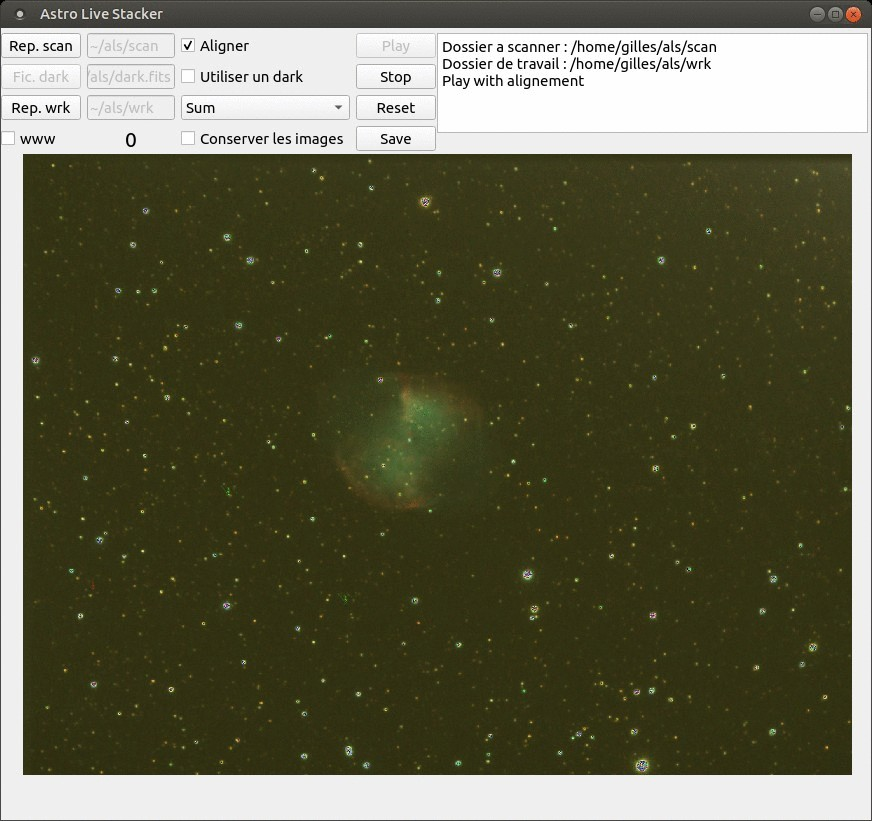
Salut à tous ça faisait un moment que ça cogitait bien fort, et plusieurs solutions ont été testées. En particulier avec Siril, qui a été mis de coté au profit d'un truc complètement en python. Donc je vous présente "ALS" Astro Live Stacker (ça me faisait marrer comme nom, genre qui se prend au sérieux) C'est quoi ? C'est une application qui permet de surveiller un dossier dans lequel on enregistre des images. A l'arrivée d'une nouvelle image, celle ci est additionnée (stackée) avec le résultat précédent. Deux méthodes sont possibles : - la somme toute bête - la moyenne Pour qui ? Là maintenant, c'est pour les curieux. ça marchouille mais c'est encore plein de truc à faire Nous n'avons pas essayé sur windows, aventuriers de Microsoft, à vos claviers. Linuxiens, ça devrait être plus facile pour vous. Adeptes du VA : surveillez, les gars, ça va vous plaire mais va falloir taper des trucs bizarres. Comment ? Tout est sur mon github https://github.com/gehelem/als Il faut installer quelques modules python : - pyqt5 (GUI) - watchdog (new file checking) - numpy - astropy (to save and read fit file) - tqdm (for %) - astroalign (frame alignement) - cv2 ( TIFF saving and debayering) Puis quelques linuxeries : sudo apt update sudo apt install python3-opencv python3-pip git pip3 install astropy numpy tqdm watchdog pyqt5 astroalign cd ~ git clone https://github.com/gehelem/als.git cd ./als mkdir scan mkdir wrk Pour lancer le machin ça se passe dans un terminal aussi : python3 ~/als/als.py Sur ALS vous spécifiez quel est le "dossier à scanner" puis appuyez sur play Ensuite lancez vos prises de vue pour qu'elles s'enregistrent en fits dans le "dossier à scanner" Le stack se fait au fil de l'eau, et ALS vous affiche l'image. Le résultat est stocké dans le dossier "wrk", en TIFF et en FITS Attention le contenu est supprimé à chaque appui sur "play" A venir Pour les soirées en public : ajout d'un service web pour partager le résultat en live Soustraction d'un dark effectué préalablement Performance Sur nos machines, le débit arrive à suivre à quelques images par seconde. A voir ce que ça donne sur un ARM, nous n'avons pas encore essayé. Ce que ça ne fait pas ça ne prend pas les images, qui peuvent venir de n'importe quoi du moment que c'est des fits Les stack restent volontairement simples -pas de suppression des pixels chauds/frois -pas de normalisation -pas de flat -pas d'offset -c'est pas Siril faut pas rêver 🙂 Format Uniquement des fits. S'ils sont en couleur, ils sont dématricés à la volée On fera peut-être l'effort de traiter les RAW issues des DSLR Last but not least : Grace à qui ? @dragonlost Sans lui, j'y serais encore. J'ai mis plusieurs mois à arriver à des choses qu'il a mis 5 minutes et 30 lignes de code pour tout faire. Sébastien : T'es vraiment mon champion, sans toi je ramerais toujours (à noter que j'ai découvert le python et ses joyeusetés il y a peu, quelle prise de tête !) Gilles + Sébastien
-
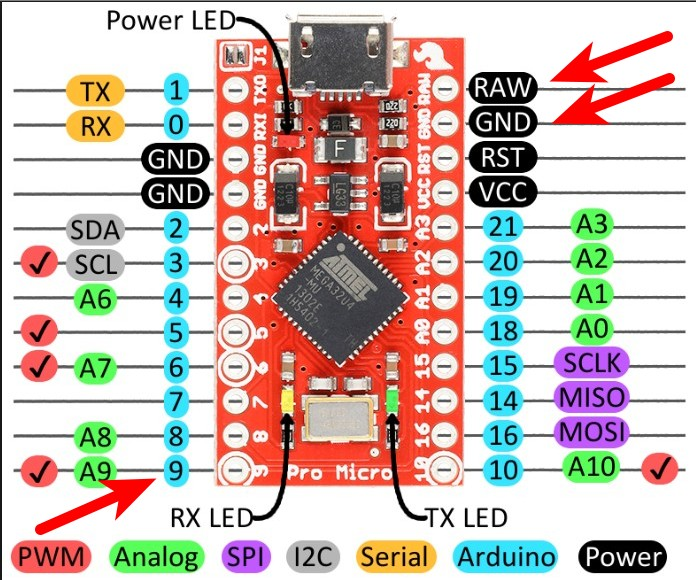
Salut, Je me lance dans un petit bricolage, que bien entendu je ne peux m'empêcher d'exposer ici rapport à ma tendance exhibitionniste. Un servo et un écran électroluminescent 10x10 Je vais essayer, on verra bien, je reposterai la progression. https://youtu.be/5A2bPua31yQ ======================================================================= = Mise à jour récapitulative pour les copains qui ne veulent pas se fader tous les posts = ======================================================================= On va essayer de se lancer dans les explications, que je mettrai à jour au fur et à mesure des questions et avancées importantes. Note préliminaire Je l'écris une fois pour toutes : je ne fais pas de pub pour tel ou tel commerçant, je donne juste des infos plus précises à titre d'exemple. Et si vous vous trompez, ne venez pas me tirer les oreilles : je revendique avec véhémence le droit de me tromper aussi. D'ailleurs tiens, je ferai même exprès de me tromper pour vous obliger à réfléchir plutôt que de cliquer bêtement sur "order" Principe général Je veux que ça reste simple, au moins au niveau électronique. Mécaniquement, chacun verra selon ses possibilités (impression 3D, menuiserie, trombones et shamallow, ...) En gros, il faut un servo, et un arduino qui sont la base de tout le reste. Le servo nécéssite un peu de courant : pour éviter d'avoir à gérer une alimentation externe, on va passer par un Hub USB alimenté. La partie éclairage doit être dimmable, c'est à dire que le dispositif doit pouvoir être commandé en intensité. Choix du servo Tous les servos de modélisme sont des bons candidats : Le gros avantage c'est que leur protocole de commande est universel Il faut tenir compte de deux choses : le débattement que le servo permet : la plupart fait 180°, il en existe de 270° ou 360°. A vous de voir ce qui convient à votre besoin la charge qu'il supporte : si l'écran est léger, pas besoin d'alourdir le nez du télescope avec un servo trop lourd qui ne servira à rien, à l'inverse un servo sous dimensionné aura du mal à faire bouger l'écran Je ne mets pas de référence, il y a tellement de modèles, le choix est immense. (et il ne sert à rien de mettre plus de 10€ là dedans par les temps qui courent) Choix de l'arduino La question n'est pas anodine. Ici aussi on devrait pouvoir dire que n'importe quel arduino "classique" fera l'affaire. C'est le cas, mais en pratique ça peut parfois poser quelques problèmes. Je recommande (ça n'engage que moi) les arduinos basés sur un Atmega32u4 Pourquoi ? Ce microcontrôleur intègre nativement la couche de communication USB, il n'y a donc pas de tambouille sur l'arduino pour qu'il supporte l'USB. A l'inverse des arduinos basés sur l'atmega328 (Arduino Uno) ou Atmega2560 (Arduino Mega,) sur lesquels une puce supplémentaire est ajoutée pour transformer les instructions qui arrivent par l'USB en instructions RS232. Cette puce n'est pas toujours la même d'un fabriquant à l'autre (les plus courantes : FTDI, CH340) Ce qui pose problème, c'est une facécie concepteurs de l'Arduino : lorsque la communication série est initiée, la puce supplémentaire demande un Reset de l'Arduino. ça n'a l'air de rien, mais c'est une vraie vacherie, on en reparlera (ceci dit il y a sans doute une raison bien précise, hein...) Donc, mon conseil : Le plus petit des arduinos basés sur un Atmega32u4 = Arduino pro micro ou Arduino pro mini La dénomination est un peu variable, assurez-vous juste d'en prendre un qui contienne cet Atmega32u4 Actuellement, 6€ sur eBay : lien Bon maintenant si vous avez un stock d'arduino uno/nano et compagnie, ça ne vous met pas hors de course. On fera un topo spécial là dessus. Eclairage - version led Je ne suis pas fan des bandeaux à led qu'on commence à trouver un peu partout, mais je ne demande qu'à être convaincu du contraire. Moi, je fais dans le classique : On trouve partout des lots de leds blanches, qu'on peut monter comme on veut 4€ les 100 (oui oui) sur eBay : lien Eclairage - version panneau electroluminescent -- à compléter, vu que en fait c'est peut-être pas très simple à dimmer ces affaires -- Branchement du servo sur l'arduino Pour fonctionner comme suit, l'arduino doit être branché avec un HUB USB alimenté. Tous les servos se servent de trois fils. Une masse (fil noir) = le - Un VCC (fil rouge) = le + Un signal (orange, blanc, ou autre que noir ou rouge) Pour le branchement, je vous propose donc ce qui suit : Fil noir - la masse sur "GND" en haut à droite Fil rouge - VCC sur "RAW en haut à droite Fil blanc/orange/autre - Signal sur le pin 9 en bas à gauche (Ce dernier peut être différent, dans ce cas il faut modifier le programme qu'on charge dans l'arduino) Branchement de l'éclairage sur l'arduino Le controle de l'éclairage doit se faire par une sortie "PWM" de l'arduino. ça signifie que cette sortie ne foncionne pas juste en tout-ou-rien, elle permet de restituer une tension qu'on peut faire varier par programmation. On choisit le pin 6 (A7) du schéma ci-dessus. Attention Cette sortie ne peut pas raisonnablement délivrer plus de 20mA Donc ça suffit pour une simple led pour les tests, mais il ne faut pas s'imaginer de commander en direct une guirlande de noël avec. C'est juste un signal de commande qui sort à cet endroit, on s'en sert pour piloter notre éclairage (voir plus bas) Electronique de commande de la variation de l'éclairage -- à compléter -- Programmation de l'arduino Je ne documente pas la façon de programmer un arduino, c'est bien documenté de partout. Je mets juste les sources du seul fichier nécéssaire En attendant que les modifications soient validées par l'auteur original : https://github.com/gehelem/ArduinoLightbox/blob/master/LEDLightBoxAlnitak.ino Topo spécial arduino uno/nano -- à compléter --
-
bonjour, actuellement j'ai ceci : et pour augmenter mon WAF, je projette d'y mettre ceci à la place : (enseigne de bricolage quelconque, version pour enfants) C'est juste pour protéger l'instrument et pouvoir dégainer/rengainer plus rapidement les soirs de semaine qui correspondent à cet état d'esprit : Mardi, 23h, levage de tête, "zut, si j'avais su j'aurais sorti le matos", plus d'énergie, dodo. Donc je me disais que ces petites maisons ma faciliteraient la vie avant : tout est prêt, plus qu'à ouvrir le toit et appuyer sur "On", Et après : "Off" et fermeture du toit . Pas envie/besoin de visuel, rien que pour le remote. (j'y mettrais bien un couche isolante à l'intérieur) En gros, un truc comme ça : https://stargazerslounge.com/topic/198091-a-remote-unmanned-pico-observatory/ Du coup la question : Niveau encombrement c'est au chausse pied. Y a-t-il des combines pour savoir exactement de quel volume j'ai besoin ? Cette question a déjà été couverte ici, mais la plupart du temps c'est la méthode empirique. Au jugé c'est facile à estimer, mais comme j'ai plusieurs optiques et que je veux vraiment que ce soit minimal, je me demandais s'il n'existe pas un petit logiciel ou une astuce élégante et raffinée Merci d'avance pour vos conseils Gilles.
-
salut à tous, je récapitule : Nous avons donc l'ED72 qui ira sur la NEQ5 avec son AstroEQ. Puis l'ED80 qui campe depuis un moment sur son EQ6. Parfait, mais le C11, hein ? Comment je fais pour ne pas passer pour un pinpin aux RAP ? Et bin je me dégotte une CI-700 d'occaz. C'est quasi fait. Voilà. (mais vu que d'ici là de toutes façons je n'aurai toujours pas réussi une seule photo, je passerai pour un pinpin, donc...) Vous connaissez cette monture ? On trouve peu de retours dessus, c'est une G11 qui aurait eu moins de succès... En face il y a quelques remontées antédiluviennes, mais rien de récent : Le silence lié à la convoitise, certainement. Vous la connaissez ? Z'en pensez quoi ? Je vais y coller des vrais moteurs, façon AstroEQ (ou OneStep on verra) Merci de vos retours Gilles.
-
C'est Noël, j'ai 45 ans, et ma tendre épouse a encore tapé dans le mille. Je me suis couché à 3h du matin, bien obligé de m'arrêter au paquet numéro 9 sur 12 car les pièces me tombaient des doigts. Et avec le pull de Papy pour faire la Lune : ça m'a donné envie d'ouvrir un fil sur les trucs en Légo qui causent de l'espace... Pas besoin de présenter :