jDef
-
Compteur de contenus
73 -
Inscription
-
Dernière visite
Visiteurs récents du profil
1981 visualisations du profil



jDef's Achievements
-
Bonjour l'Appli marche bien. Un point cependant, la carte me semble apparaitre à l'envers, l'est est à droite et l'ouest à gauche, ça ne devrait pas être l'inverse quand on regarde vers le sud, comme la carte du ciel standard? Ce serait inintéressant de pouvoir exporter l'horizon pour une utilisation dans NINA par exemple.
-
Merci. Effectivement, je ne guide pas et c'est une caméra non refroidie. Elle est "rafraichie" pour rester à Tambiante -3°C avec un refroidisseur de téléphone. Je fais juste dans ma séquence NINA un recadrage toutes les 300 images (#la période de la monture) pour faire du diphtering et éviter le "walking noise". Je vais me coucher et je récupère les données le lendemain matin... Honnêtement, il n'y a vraiment aucune galère pour le prétraitement, ça prend un peu plus de temps évidemment, là il n'y avait pas beaucoup d'images (en général c'est #8000 images), mais j'ai mon script siril multisessions qui me sort automatiquement mes 4 images LRVB et les statistiques. Je galère plus sur le post traitement :).
-
Bonjour merci pour vos retours. @Tromat il y a trois différences entre les 2 images : - le temps de pose, je suis à 2,5h, là ou celle d'astobin est à 5h, - la résolution, il est resté en natif, alors que j'ai rééchantillonné avec le drizzle à 0.68"/pix pour gagner en S/B et rester cohérent d'un seeing moyen à 2/3", - ma maitrise du traitement d'image.... L'intérêt des poses courtes, pour mon cas spécifique, c'est de ne plus avoir à me soucier du guidage, des satellites, ... la configuration est plus légère que pour une pose longue. Je laisse tourner toute la nuit sans intervention. Pour la turbulence, au dessus de 2 ms de toute façon on moyenne, donc les 2 s est un compromis en termes, de nombre d'images, de niveau de signal unitaire et de qualité de rondeur des étoiles (qualité de suivi de la monture). Au final, je rejette 10% des images sur la luminance. Il n'y a effectivement jamais de saturation en 2s, sauf cas rare sur des étoiles un peu trop brillantes, comme celle en haut à gauche dans l'image. La pose courte n'est pas la panacée, en particulier pour du faible Bortle ou sur de très faible objet. A Bortle 3, pour avoir le même S/N final qu'en poses longues sur des signaux en limite de détectabilité, il faut poser 2 fois plus longtemps en poses courtes, du fait de l'accumulation du bruit de lecture. Dès qu'on a un peu de signal (>2e-/s) c'est quasiment équivalent en terme de S/B final entre les 2 approches. Suite à discussions sur le forum d'en face, j'ai repris le traitement pour désaturer la nébuleuse et surtout les étoiles et c'est principalement sur ce dernier point que j'ai des difficultés du fait de la grande dynamique à gérer pour faire ressortir les étoiles faibles sans saturer les fortes. J'ai rajouté un coup de déconvolution Graxpert à la fin. C'est pas parfait, il n'y a pas de saturation du cœur de la nébuleuse, mais peut-être encore trop poussé par rapport au reste avec cette couleur blanche. Quand à la différence de couleur avec l'image d'astrobin, je ne sais pas où est la vérité.

-
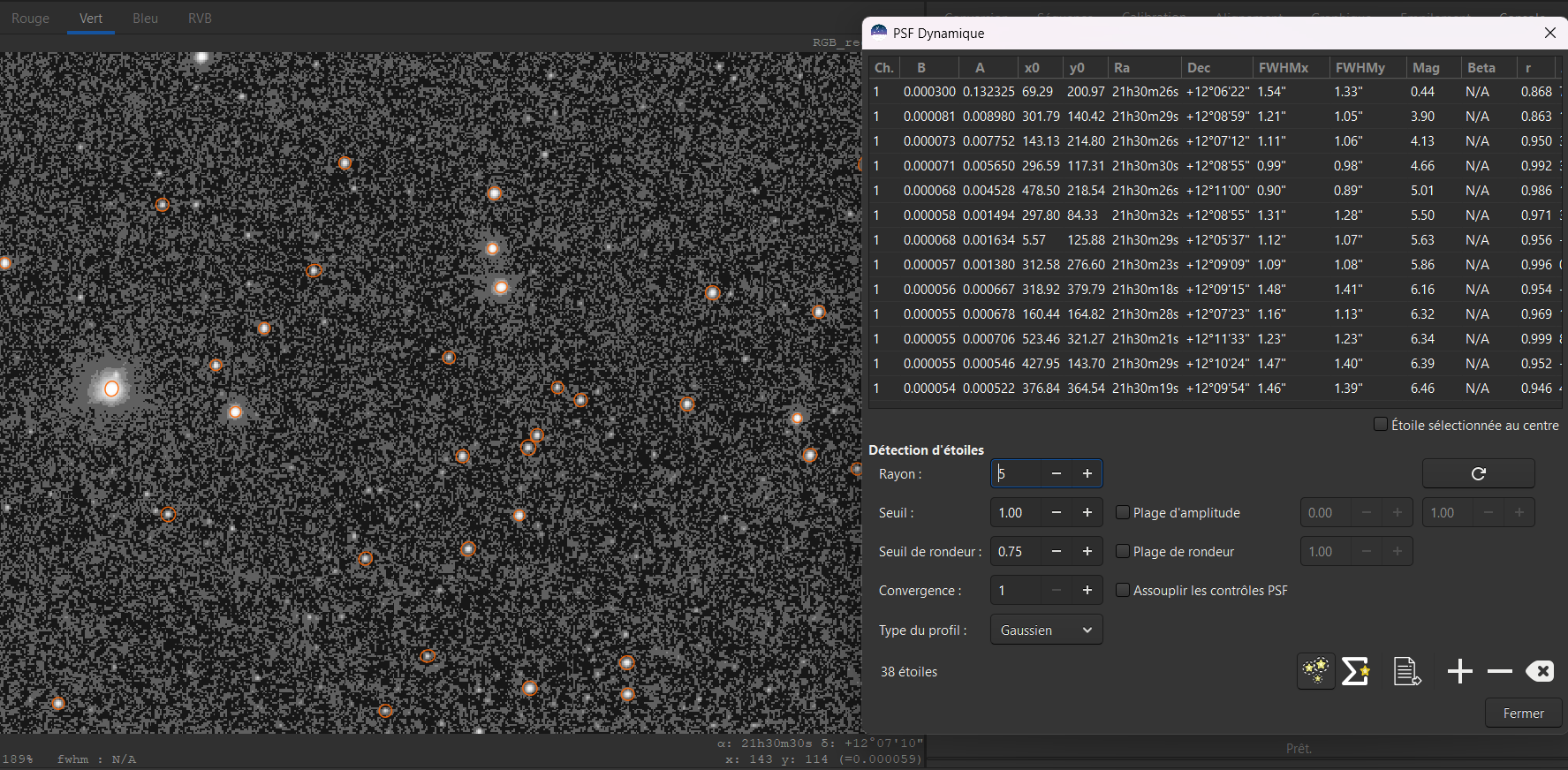
Bonjour Ci-joint M20 prise l'été dernier au C9.25 EHD F/D 6.7 (réducteur de focale Astrophysics CCD67), avec une caméra PlayerOne Saturn-M (IMX 533) non refroidie en LRGB. Acquisition en 14b, Gain de 135, un peu au-dessus du gain unitaire pour maximiser le S/B unitaire et surtout éviter le bruit de trame ("walking noise") : L : 2641 x 2s (#1,5 h) R : 588 x 2s (#20 mn) V : 596 x 2s B : 599 x 2s Résolution native de 0,49"/pix rééchantillonnée à 0,68" lors du traitement drizzle dans Siril. L'acquisition se fait sous NINA sans guidage, mais avec un recentrage toutes les 300 images pour assurer un dithering correct. Utilisation de Siril et SetiAstrosuitePro. La luminance mériterait d'être complétée pour booster la partie en bleu (oxygène). La statistique des acquisitions avant tri pour intégration (rondeur > 0.75 et 90% des FWHM) et rééchantillonnage.
-
Merci. En fait cela dépend de la caméra. Pour avoir fait des essais avec les 2 types de caméras, avec une caméra couleur on est bien adapté aux amas globulaires et nébuleuses planétaires brillantes, pour les galaxies ou nébuleuses on sent qu'on manque de signal, sauf à poser beaucoup plus longtemps, par contre en LRGB on peut tout imager. Les seules contraintes sont, qu'à iso S/B cible, il faut poser 15% de plus qu'en pose longue (pour une pose de 2s) à cause de l'addition du bruit de lecture, ça remplit le DD et le pré-traitement prend plus de temps. Mais a contrario : le drizzle marche beaucoup mieux, en particulier pour les caméras couleurs, on ne sature quasiment jamais les étoiles, on a un peu de marge pour trier les images sur la FWHM/rondeur pour ne garder que les meilleures, on peut utiliser une caméra non refroidie, même si dans mon cas j'utilise une refroidisseur de smartphone sur la face arrière pour maintenir la caméra à un peu moins que la température ambiante, le montage et les contraintes d'utilisation sont simplifiés car on n'a plus besoin de faire de guidage, un simple recentrage de temps à autre suffit à générer le dithering. Donc globalement, je trouve que les avantages l'emportent.
-
Bonjour Ci-joint NGC6888 prise l'été dernier au C9.25 HD F/D 6.7 (réducteur de focale Astrophysics CCD67), avec une caméra PlayerOne Saturn-M (IMX 533) non refroidie en LRGB : L : 5316 x 2s (#3 h) R : 600 x 2s (#20 mn) V : 596 x 2s B : 585 x 2s La statistique des acquisitions avant tri (rondeur > 0.75 et 90% des FWHM - 6000 L et 600 R/V/B) : Résolution native de 0,49"/pix rééchantillonnée à 0,68" lors du traitement drizzle dans Siril. L'acquisition se fait sous NINA sans guidage, mais avec un recentrage toutes les 300 images pour assurer un dithering correct. Utilisation de Siril et Seti Astro Pro suit.
-
Soustraire le biais du dark n'est, à mon avis, utile que dans 2 cas, sinon il faut travailler directement avec un masterdark : les caméras non refroidies, il faut faire alors forcer l'optimisation du dark en "autoévaluation". le lucky imaging en CP (pose<4s). En effet, dans ce cas les structures observées sur le biais vont devenir prépondérantes et générer du bruit télégraphique et là c'est foutu. Personnellement, je fais un masterbiais avec 500/1000 images, donc il n'y a plus de bruit, juste les structures. En ce qui concerne les flats, je mets, comme beaucoup d'autres l'ont recommandé, l'offset à 0, donc plus de Pb de biais à soustraire. Ca évite les image non uniforme après prétraitement du fait d'un mauvais niveau de biais. D'autant que pour certaines caméras, même récente, le biais peut être variable en fonction de la température, d'où qq complication si non refroidies.
-
Il faut charger les 4 images linéaires L, R, V, B dans l'utilitaire de composition. Cliquer sur "aligner" en choisissant "ciel profond" et "premier canal" (luminance comme référence comme ça elle n'est pas modifiée elle porte les détails), puis "tout sauvegarder", il y aura création de 4 fichiers comp_xxx correspondant aux images alignées. Donc normalement au moment de la recombinaison après étirement, les images resteront alignées. Après il faut traiter séparément l'image couleur RVB (après combinaison RVB dans l'outil en linéaire) et l'image L et recombiner tout ça après étirement avec la commande rappelée par @nico1038. Les images resteront alignées sur la luminance. La recombinaison peut se faire aussi avec GIMP ou Affinity qui est maintenant gratuit pour faire L + RVB avec les scripts astro disponibles pour ces 2 logiciels.
-
Dans tous les cas, le cercle utile final correspondra au cercle image disponible au F/D natif multiplié par le coefficient de réduction du réducteur. Extrait de la notice du réducteur de AP : The CCDT67 has a clear aperture of 44 mm or 1.75”. At 0.67X compression, it will fully illuminate a 29 mm circle - 44 mm x 0.67 = 29 mm.
-
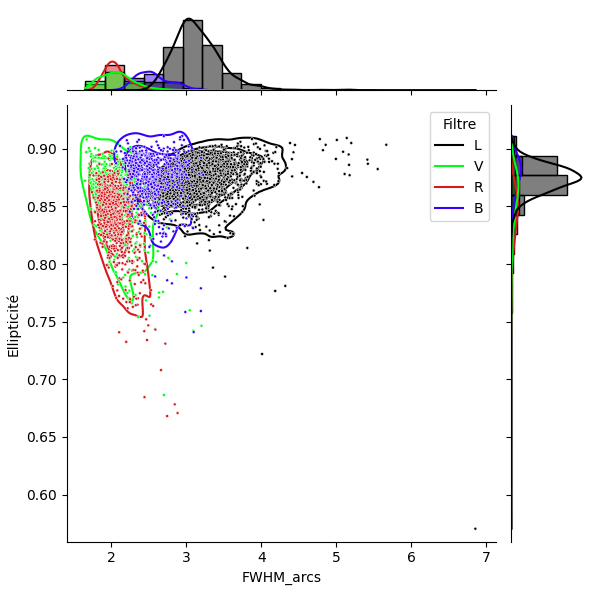
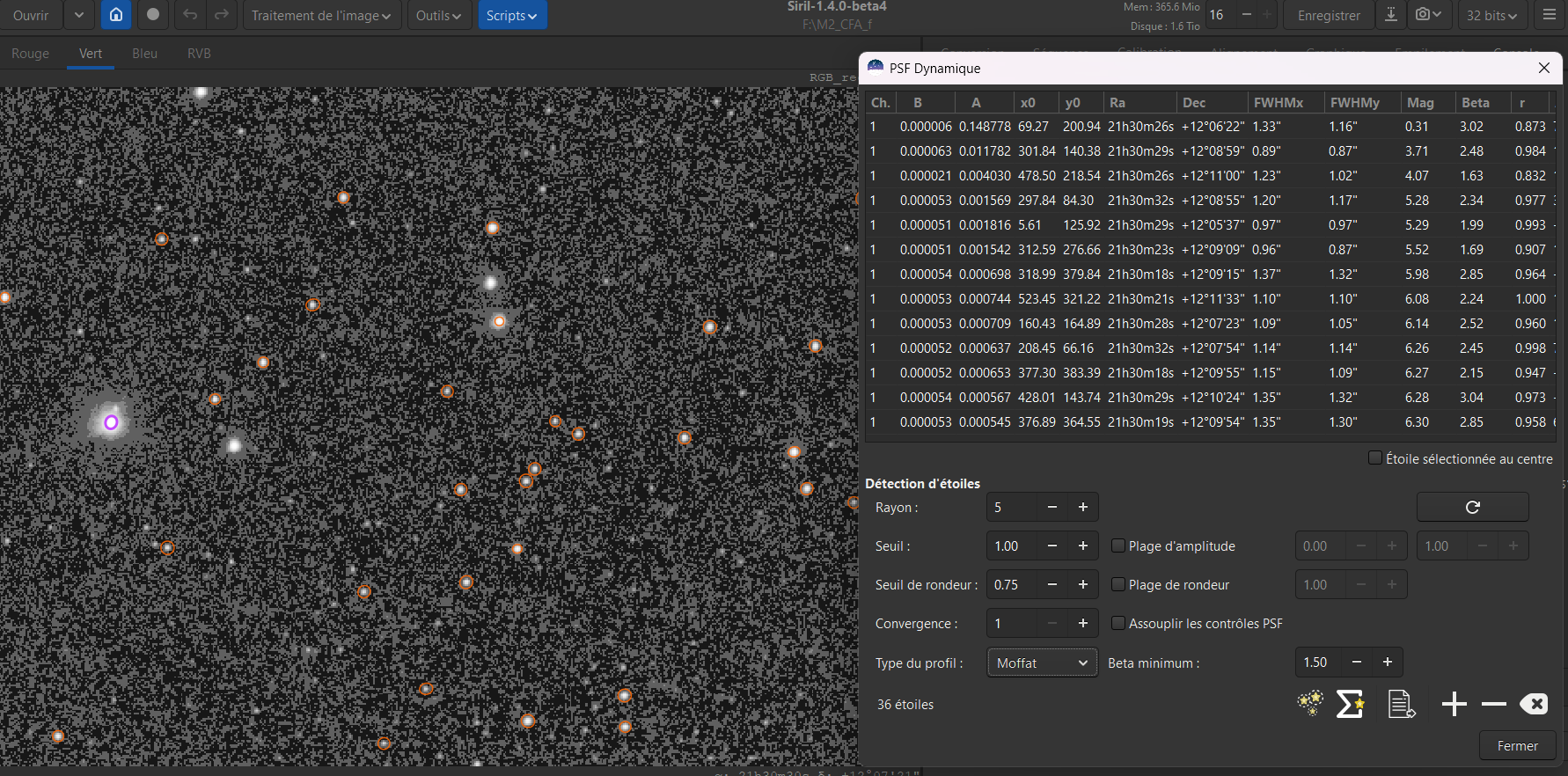
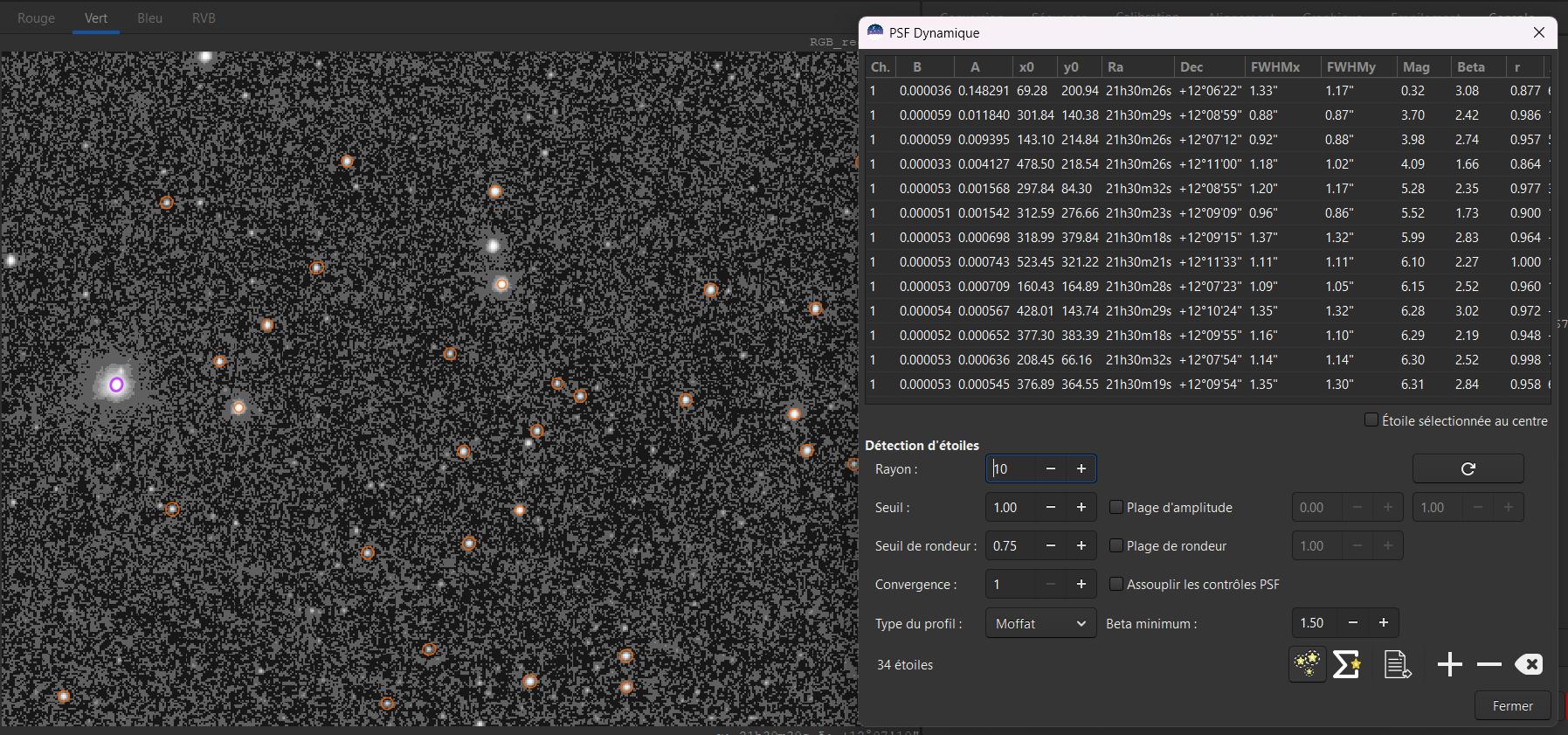
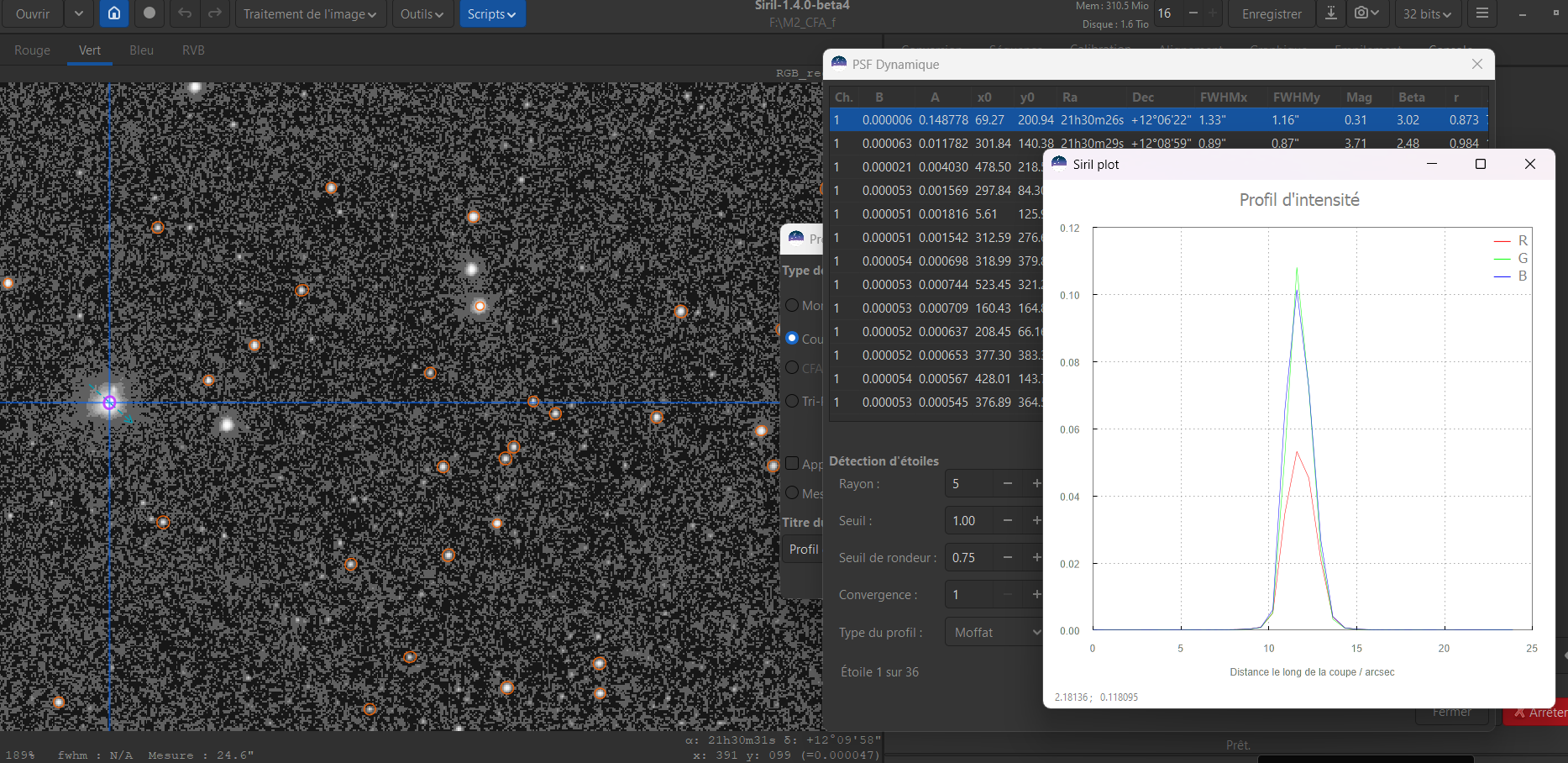
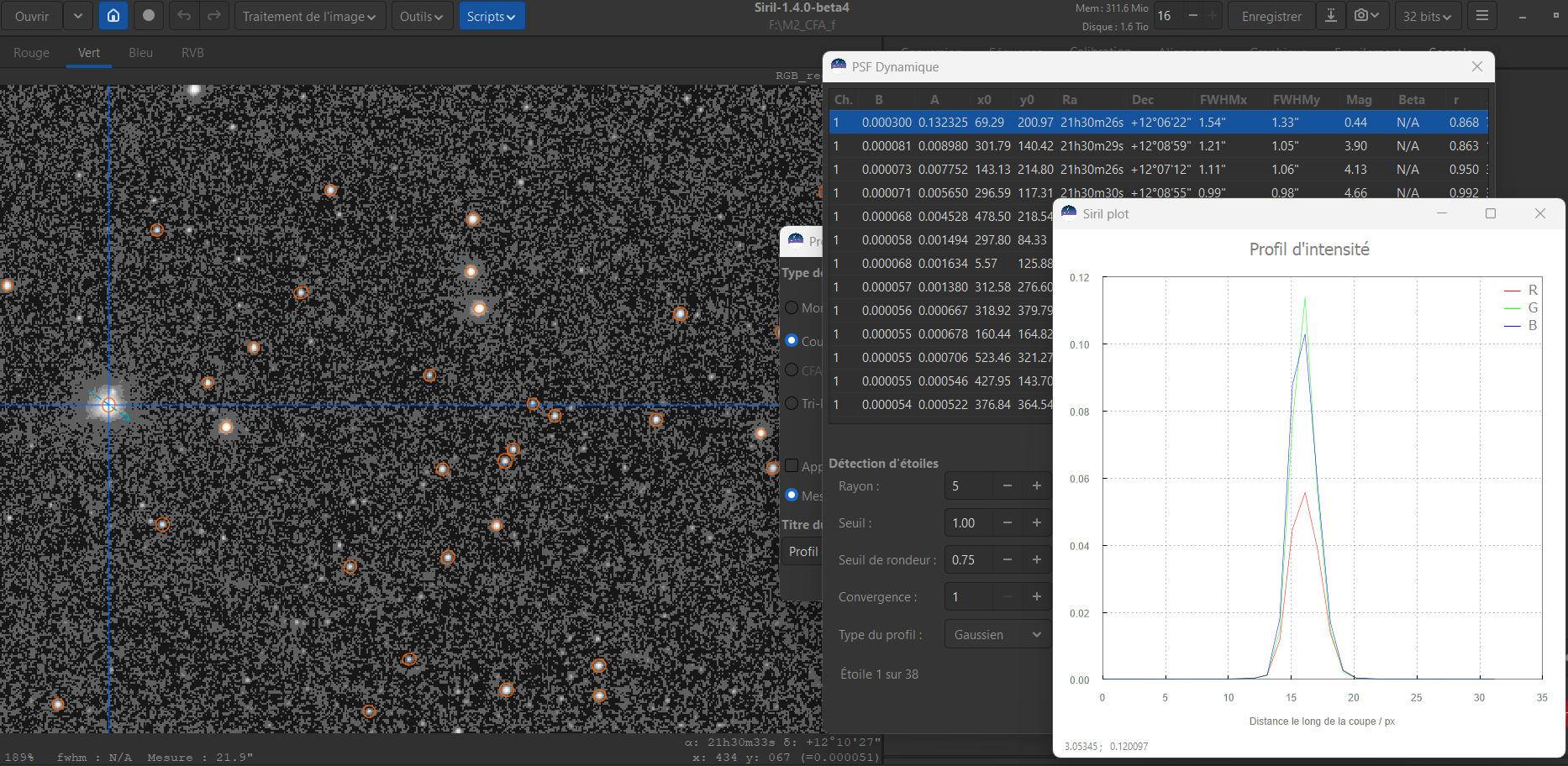
Bonjour Je reviens avec mon image pour une nouvelle question concernant la détection des étoiles. En MOFFAT, les 2 étoiles au milieu ne sont pas détectées alors qu'elles ont largement le niveau pour. Si on augmente le diamètre du rayon de détection à 10, une des étoiles est détectée, en contrepartie de la perte de détection sur d'autres étoiles plus petites. Les autres paramètres n'ont pas d'effet sur la détection sauf le modèle Gaussien, où les 2 étoiles sont détectées avec les paramètres par défauts. Une idée? Cdt. RGB_recad.fits
-
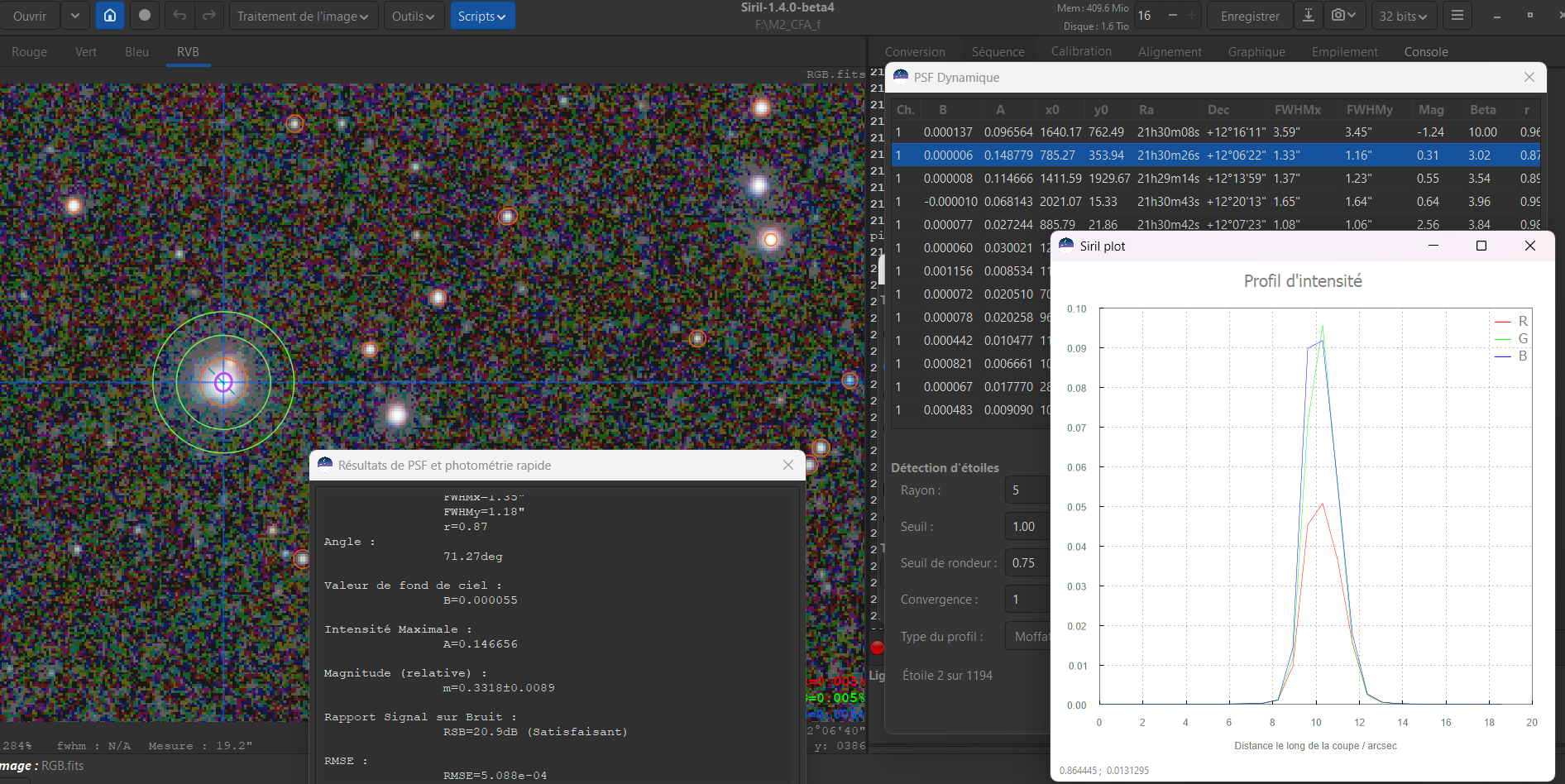
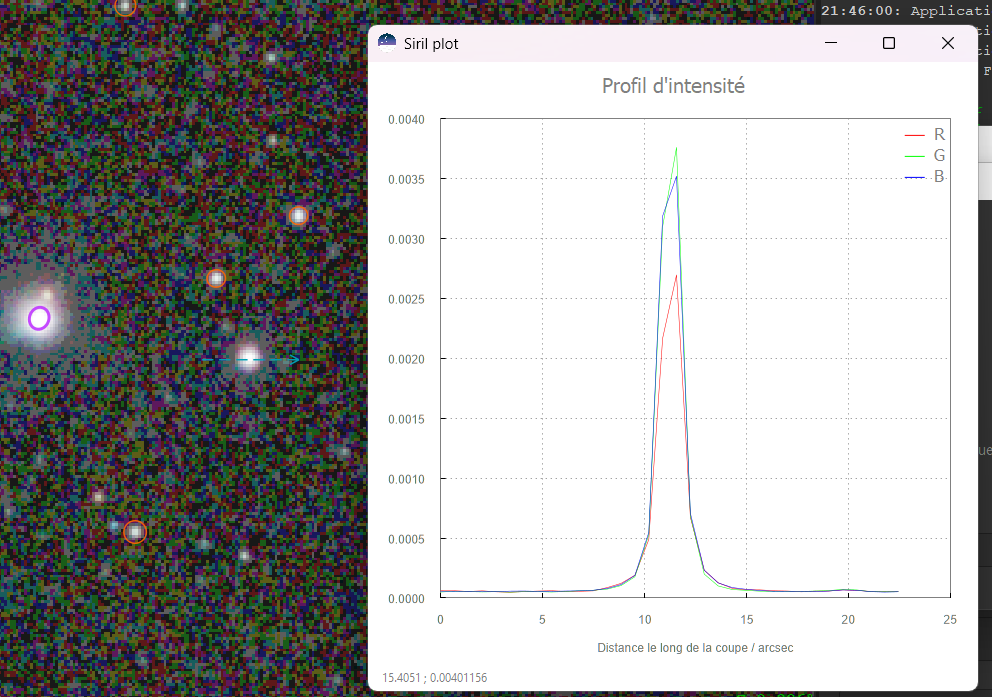
Tech Classification des étoiles en "saturée"
un sujet a posté jDef dans Logiciel SIRIL de Siril et Sirilic
Bonjour J'aurai une question sur l'image en PJ. C'est une image linéaire : Pourquoi l'étoile sélectionnée est classée saturée alors que le signal ne l'est manifestement pas. On le voit clairement sur la coupe de niveaux. Autre point, si la détection se fait sur le modèle MOFFAT, la saturation est déclarée sur les 3 plans couleurs, par contre avec le modèle gaussien, le plan vert n'est plus saturée. Une idée? Cdt RGB_recad.fits
-
Bonjour, ce qui compte c'est d'optimiser le couple résolution spatiale résultante - S/B au regard de la FWHM moyenne observée. Je fais des poses courtes (2s) et j'ai généralement une FWHM moyenne sur les images individuelles < 2", je ne pense pas trop m'avancer en disant qu'on aura du mal à faire mieux en amateur a fortiori avec des poses longues. Il faut donc rechercher un échantillonnage dans un rapport 3 par rapport à ces 2" moyen, soit 0,66"/pix, au-delà on va perdre en sensibilité pour aucun gain de résolution. En CP, en générale la résolution n'étant pas contrainte par le matériel mais par la turbulence. Donc avec un pixel à 1,45µm, le calcul est rapide : - 206.265*1.45/250/2 = 0.60 Ok - 206.265*1.45/250/4 = 0.3 NOk - 206.265*1.45/350/2 = 0.43 ~Ok - 206.265*1.45/350/2 = 0.21 NOk On peut toujours rééchantillonner l'image lors de l'intégration drizzle avec Siril, ce qui n'est pas possible à ma connaissance avec les autres logiciels, pour atteindre la résolution optimale voulue, mais plus on est proche en natif de la bonne résolution, meilleur sera le S/B, à temps de pose égale. Des configurations avec un pixel à 2.9 pour un 250 mm et 3.76 pour le 350 seraient plus adaptées me semble-t-il. Par contre le champ va être très petit du fait de la taille du capteur à comparer à un 533 ou 585. En ciel profond, un 715 pourra aller pour des nébuleuses planétaires, pour le reste ... ou pour les très grand champ ou faible diamètre pour gagner en résolution.
-
erreur python fonction bruit de graxpert
jDef a répondu à un sujet de anapic dans Logiciel SIRIL de Siril et Sirilic
Bonjour la PJ est vide. -
Intégration de fonction console dans les menus
jDef a répondu à un sujet de jDef dans Propositions d'évolution SIRIL de Siril et Sirilic
Bonjour La fonction Unsharp est effectivement un peu dépassée, par contre pour la fonction gauss, il me semble qu'elle peut avoir un intérêt pour 3 aspects : - lorsqu'on crée un masque synthétique pour flouter les transitions; - réduire le bruit (effet assez intéressant en linéaire); - lors d'un binning, comme le préconise C. Buil (c'est pour la spectro, mais applicable au reste), de faire un filtre médian, suivi d'un filtrage gaussien avant d'appliquer le binning. Cordialement Jacques -
Bonjour Dans la version 1.3.4 la compensation de la distorsion des images a été introduite lors de la phase d'alignement. Je présume qu'il est préférable de créer le fichier de distorsion sur la meilleur image de la séquence pour avoir quelque chose de propre. Or tel que se présente l'interface, il faut choisir avant de lancer l'alignement l'image qui fournira le fichier de distorsion, donc j'en déduirais, dans le cas d'un alignement 2 passes, il faut faire une première passe sans distorsion pour déterminer l'image de référence, faire son astrométrie, relancer l'alignement 2 passes avec distorsion pour la prendre en compte, puis appliquer l'alignement disponible. C'est bien ça? Cordialement.