Discret68
-
Compteur de contenus
2252 -
Inscription
-
Dernière visite
-
Jours gagnés
2
4 abonnés


Visiteurs récents du profil

Discret68's Achievements
-
Tout à fait. Application de la norme NF C15-100 ! Cohabitation dans une même gaine de câbles véhiculant de la basse tension et de la tension secteur interdit. Après, chacun fait ce qu'il veut chez lui ! Ce n'est pas si petit. On trouve des fibres dont le gainage est de différents diamètre. Les versions pour utilisation en gaine enterrée ont un diamètre plus important pour résister aux éventuelles contraintes de terrain. La principale difficulté pour passer une fibre dans une gaine est liée à la taille des connecteur aux extrémités. Ce n'est pas différent en dimensions par rapport à un connecteur Ethernet, mais l'avantage de la fibre est que c'est optique, donc aucun risque de perturbation électromagnétique avec un câble. En temps qu'amateur, il nous faut acheter de la fibre avec connecteurs car raccorder une fibre sur un connecteur ad'hoc, il faut un équipement particulier. 2 boitiers de conversion Ethernet/fibre et une fibre de 40m me sont revenus à moins de 100 euros.
-
Le fonctionnement des CPL est parfois délicat compte-tenu du réseau électrique interne. Si tu n'est pas sur le même réseau (en aval du même départ disjoncteur tableau), le signal peut être très affaibli. Vu que chez moi, les CPL ne donnaient rien, je suis passé au wifi avec répéteurs. C'était guère mieux. Beaucoup de coupures et un débit de transfert de moins de 2Mo/s. Heureusement que je transférais mes images au fil de l'eau durant la nuit, ça me permettait d'avoir toutes les images au petit matin, car plus de 200 images à 50Mo chacune et 2Mo/s de débit, c'est interminable. Je ne pouvais pas tirer de gaine directe entre la maison et l'abri pour y loger un câble Ethernet (dalle béton, ...) et pas question non plus de passer le câble Ethernet dans la gaine d'alimentation secteur de l'abri car gaine trop faible en diamètre. De plus, il risque d'y avoir des perturbations électromagnétiques et c'est règlementairement interdit. Et puis un jour, je me suis rappelé que j'avais une grosse gaine qui alimentait mon local technique piscine qui est à proximité de l'abri astro. Finalement, j'ai tiré une fibre optique entre la maison et mon abri en passant par le local piscine en tirant une gaine de 2m de long enterrée dans une petite tranchée, ce qui à cet endroit était possible. De fait, le débit est monté direct à 98 Mo/s (en gros, transfert de 2 images par seconde). Avec un convertisseur Ethernet/fibre à chaque extrémité, c'est très facile et ça ne coûte finalement pas très cher. Dans ce genre de situation "tordue", il faut néanmoins pouvoir disposer d'une gaine existante et de bon diamètre.
-

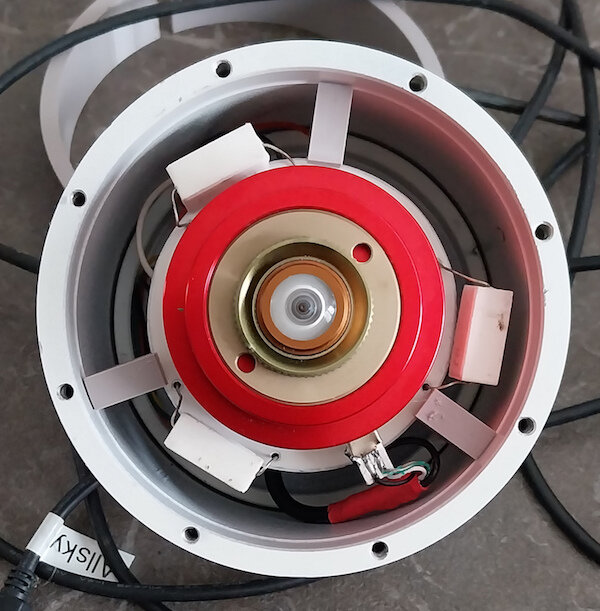
Se fabriquer une camera AllSky pour moins de 100 Euros c'est possible ;-)
Discret68 a répondu à un sujet de Astroghost-Francois dans Les bricoleurs
Avec un taux d'hygrométrie à 85% dans la boîte, je pense qu'il est totalement saturé. Je pense qu'il mériterait une petite régénération, mais tant que tu n'as pas de soucis ..... rien ne presse. la principale difficulté est d'obtenir une étanchéité 100% Après avoir exploité une allsky dans un boitier en PVC, j'ai usiné un boitier en aluminium avec des joints à chaque assemble, y compris au niveau de la connectique externe. Le boitier a été usiné au plus juste par rapport à la 224 qui est montée : Au moment de fermer le boitier, j'y ai mis quelques sachets de dessicant fraichement régénérés. Le taux d'hygrométrie est descendu à 1,7% soit un point de rosée à -33°C. Et petit à petit, sur l'espace d'une année, le taux est remonté progressivement à 50% et yoyotte depuis entre 50 et 60%. Donc, je laisse ! Effectivement, au sol, ce n'est plus pareil !
-
Se fabriquer une camera AllSky pour moins de 100 Euros c'est possible ;-)
Discret68 a répondu à un sujet de Astroghost-Francois dans Les bricoleurs
Salut Georges Je trouve que le taux d’hygrométrie interne de ta allsky est très important. En journée, il doit être supérieur à celui en extérieur. Tu n'as pas de dessicant à l'intérieur de ton boitier ? Je pense que le placement de la sonde de température/hygrométrie peut avoir une influence sur les conditions réelles au niveau du dôme. En ce qui me concerne, la sonde se trouve dans le fût de la allsky, les conditions mesurées peuvent être légèrement différentes sous le dôme. En tout cas, je constate qu'hormis la présence d'arbre au Nord, tu as un horizon très dégagé 👍 -
Se fabriquer une camera AllSky pour moins de 100 Euros c'est possible ;-)
Discret68 a répondu à un sujet de Astroghost-Francois dans Les bricoleurs
Chez moi, la sonde est dans le fût de la allsky pour éviter les fortes variations de température sous le dôme lorsqu'il y a du soleil. J'ai un petit ventilateur (carré de 20) qui brasse l'air dans le boitier. -
Se fabriquer une camera AllSky pour moins de 100 Euros c'est possible ;-)
Discret68 a répondu à un sujet de Astroghost-Francois dans Les bricoleurs
J'ai effectivement mis les 3 résistances de 4,7 ohms en série. dans le programme qui gère le chauffage, j'ai plusieurs conditions : La température de chauffe est plafonnée à 25°C dans tous les cas de figure. Ça ne sert à rien d'aller au delà. A minima, j'applique une surchauffe de 3°C à l'intérieur de la allsky par rapport à la température extérieure. Cette valeur est augmentée à 4°C si la température extérieure descend sous les 15°C et passe à 6°C si la température extérieure descend sous les 8°C Si la température extérieure passe sous les 4°, la température intérieure allsky est maintenue à 4°C. Il est possible de déduire une formule qui serait plus progressive, mais les quelques lignes pour test ayant prouvé leur efficacité depuis un paquet d'années, j'ai laissé le programme tel quel. Avec ces critères, je n'ai jamais eu de buée sur le dôme et pas de surchauffe. Néanmoins, lorsqu'il pleut, le dôme est mouillé, mais sèche assez rapidement après l'arrêt de la pluie. Avec la neige, en cas de forte chute, il en restera sur le dôme, mais elle va fondre progressivement. -
Se fabriquer une camera AllSky pour moins de 100 Euros c'est possible ;-)
Discret68 a répondu à un sujet de Astroghost-Francois dans Les bricoleurs
J'ai démonté mon ASI120MM au bout de 6 ans pour la remplacer par une 224MC que j'avais sous le coude. La 120MM a fonctionné non stop durant toute la période. A part l'anodisation rouge qui avait viré au rose et effectivement un lot de pixels chauds plus nombreux qu'au départ, surtout en été lorsque le capteur monte à plus de 60°C, cette caméra fonctionne toujours. Les 2 n'ont pas la même utilité. La allsky me permet de constater que le ciel est propre ou pas, plus que le cloudwatcher en amont du lancement d'une séquence. Par contre, le cloudWatcher me permet de lancer une séquence de repli de l'abri si la météo se dégrade. Vu que je n'arrive pas pour le moment à utiliser l'info du CloudWatcher dans NINA (l'info est bien présente mais je ne sais pas comment l'exploiter dans le séquenceur avancé. J'ai fait divers essais mais rien ne fonctionne) pour stopper une séquence et replier l'abri, j'ai fait un petit programme de surveillance qui permet de lancer le repli en question. Je vérifie l'état du relais du CloudWatcher une fois par minute et si au bout de 10 minutes, le ciel ne s'est pas dégagé (histoire de ne pas replier au premier petit nuage solitaire qui passe), le repli est amorcé (Mise en position du tube pour fermer l'obturateur, park monture, fermeture toit, arrêt de la monture, coupure d'alimentations, ....). Par contre, pour le moment, la séquence continue en vain et je jette les brutes en question au petit matin. Mais au moins le matériel est à l'abri et je dors sur mes 2 oreilles. -
nouveauté Comparatif des derniers capteurs SONY CMOS (IMX385, IMX294, IMX183, etc)
Discret68 a répondu à un sujet de xs_man dans Matériel astrophotographique
Salut Gérard C'est quoi un budget serré pour toi ? Nous n'avons pas forcément la même notion de ce que veut dire "serré" ? La 533 va donner un champ très étroit avec la focale de 2000, juste de quoi prendre des petites galaxies ou de très petites nébuleuses planétaires. Vu de chez moi, la 2600 est un minimum sur une focale de 2000. Le filtre 2" en capteur plein format, c'est trop petit, sauf peut-être pour des grands rapports f/d (RC, SCT) car pour un newton avec un rapport f/d de 4 (par exemple), le vignettage mécanique est très important et les flats ne peuvent pas corriger. J'ai une 2400MC sur mon newton de 300 en f/d4 et le vignettage est significatif. En plus, avec un retournement au méridien, c'est pire que tout sur l'image empilée ... avec flats. J'ai essayé de contrer la problématique en prenant des filtres 50 non montés, ce qui laisse un passage de 48mm dans la RAF, mais vu la distance entre le filtre est le capteur, ça vignette beaucoup. J'ai également pris des filtres montés en M52 dont j'ai récupéré la partie filtre. J'ai même usiné le carrousel de la RAF pou pouvoir les installer. Ce n'est guère mieux. Il fallait que je "crop" l'image pour virer les angles totalement disgracieux et intraitables. Dommage pour un capteur plein format. J'ai fini par craquer et j'ai installé une RAF avec filtres carrés de 50 x 50. C'est le jour et la nuit. Plus aucun vignettage mécanique, et les flats, réalisés dans les même conditions que précédemment, corrigent parfaitement l'image. Il faut juste que les cotés du capteur soient parallèles avec les coté des filtres. Image empilée avec flats sur la base de brutes réalisées avec un filtre 2" monté. Process STF appliqué uniquement : Avec un filtre rond de 50 non monté, c'est à peine mieux : Et avec un filtre de 50 x 50. Le "crop" se réduit à une bande mince sur le pourtour car je fais du dithering. Le traitement du gradient en est également simplifié : Mais cela ne résout pas pour autant le problème de Gérard ! Jean-Pierre
-
Punaise c'est en ligne OU OU OU !!!!
Discret68 a répondu à un sujet de chris29 dans Matériel général
Soit tu vas sur place, soit tu commandes par téléphone avec paiement par CB si tu n'es pas dans le secteur ! JP PS : la liste est disponible ! -
Avec le process NoiseXTerminator dans Pixinsight. Il existe également DeepSNR sous Pix. Le logiciel indépendant GraXpert (gratuit) embarque dorénavant un module de réduction du bruit. A passer plusieurs fois si nécessaire.
-
C'est une belle image mais je trouve qu'à pleine échelle, il y a pas mal de bruit résiduel : Avec réduction de ce bruit, l'image est plus douce et ne perd rien en finesse : Mais c'est juste un avis personnel. Bonne soirée JP
-
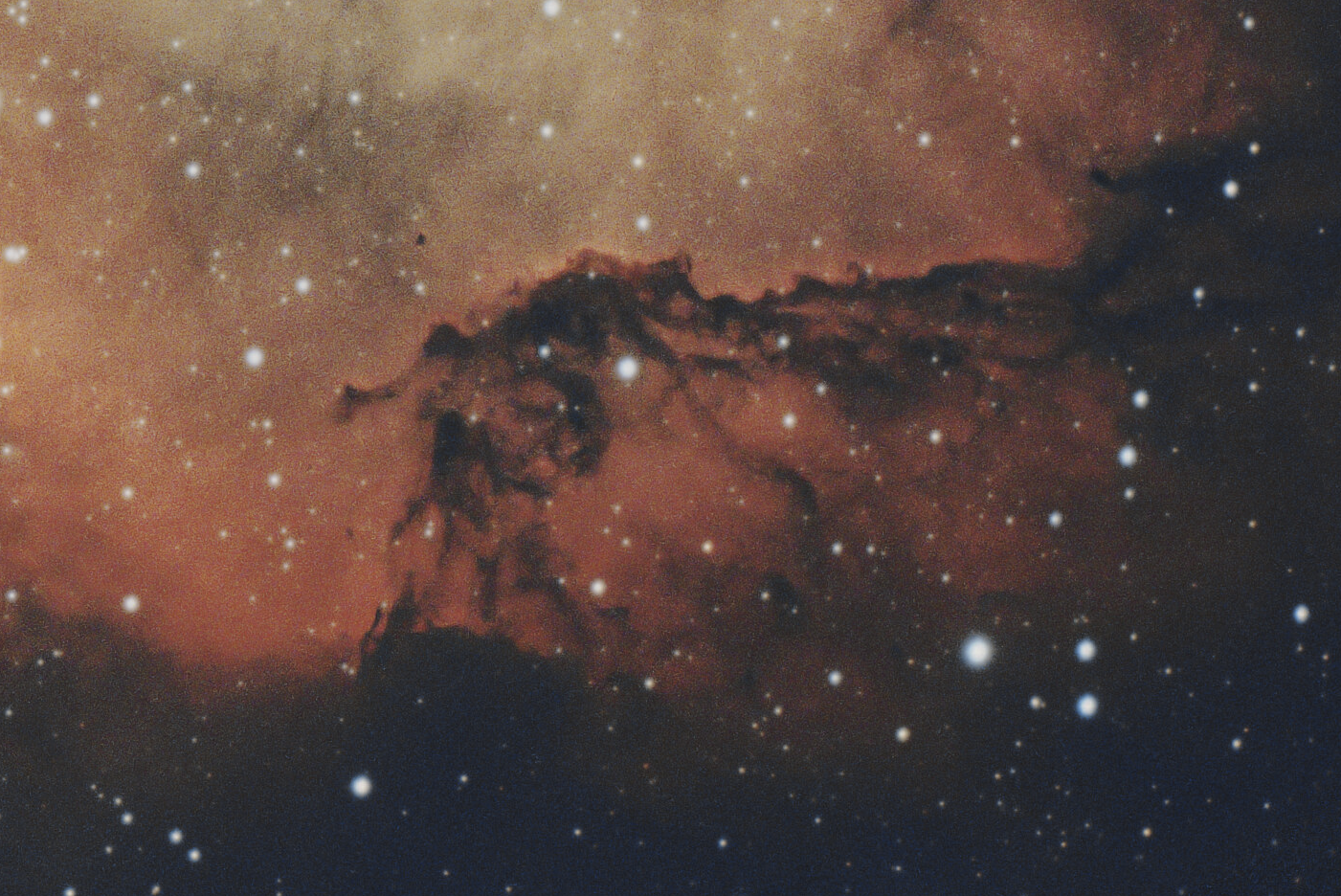
LDN1217 , B175 et vdb152 wolf's cave nebula
Discret68 a répondu à un sujet de Pascal76 dans Astrophotographie
Salut Pascal Très belle image de cette zone aux zones de poussières très contrastées. Je me suis ajouté cette cible dans mon programme. J'ai bien repéré la nébuleuse rouge que tu as malencontreusement coupé. Mais à ta décharge, j'aurais probablement omis cette zone également. Lorsqu'on regarde l'image de la zone avec NINA, on ne distingue pas toutes celles qui pourraient être intéressantes à imager. Pour cadrer d'une façon optimale, j'ai trouvé cette image sur le net, présentant le champ en beaucoup plus large et qui montre bien toutes ces nébuleuses aux formes torturées : https://telescope.live/gallery/ldn-1217-lrgbha Bon ciel Jean-Pierre -
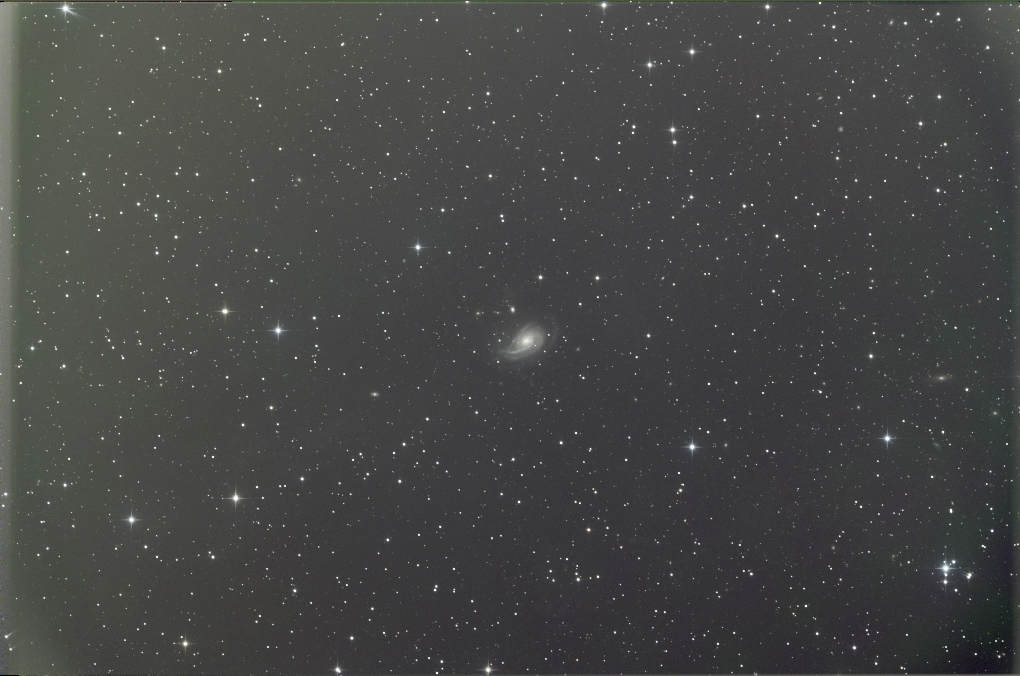
Bon, voila qui est fait ! Hier soir, après des pluies torrentielles, le ciel s'est dégagé pendant un moment. Il y avait un voile nuageux, mais on voyait des étoiles. J'ai braqué le newton vers NGC6384 et j'ai lancé une séquence pour capturer cette supernova. Les conditions n'étaient pas les meilleures. Humidité au max suite aux pluies, galaxie pas très haute dans le ciel et surtout positionnée coté Sud-Ouest, là où j'ai le plus de pollution lumineuse. Bref, j'ai pu réaliser 80 brutes de 60s chacune, prises avec le newton de 300 en f/d 4, l'ASI2400MC et un filtre Antlia-L. Compte-tenu de la pollution lumineuse dans cette zone, j'aurais peut-être dû utiliser l'Antlia-3B. Ce n'est pas l'image du siècle, mais la supernova est quand même bien visible : Merci encore à toi @Skywatcher707 pour l'info ! Jean-Pierre
-
Merci pour l'info. Dès que la météo le permet, NGC6384 sera la prochaine cible vu qu'elle est actuellement présente dans notre ciel 👍 Et en plus, c'est une belle galaxie ! JP
-
Encore une station météo sous Ascom.... mais avec son petit plus!
Discret68 a répondu à un sujet de astrolivier dans Logiciels
Ah OK, je n'avais pas vu le "truc" comme ça. Je vais tester ! Je cherchais vainement pas partie hardware comme on dit en bon français ! OK pour la modif. Il est effectivement bon de rappeler le fait qu'il ne faut surtout pas brancher une résistance directement sur la sortie d'un micro-contrôleur. Même pour déclencher un petit relais, je passe toujours par un transistor. JP