Discret68
-
Compteur de contenus
2252 -
Inscription
-
Dernière visite
-
Jours gagnés
2
Tout ce qui a été posté par Discret68
-

Développement driver ASCOM
Discret68 a répondu à un sujet de waogll dans Discussions de astronomie avec arduino
Je ne vais pas pouvoir t'aider pour le moment, mais comme j'ai également besoin de développer un driver ASCOM pour 2 rotateurs et 1 focuser pilotés par Arduino, je vais lancer l'installation des outils et voir ce que ça donne ! On verra si ça se passe mieux (ou pas) chez moi. -
Que veux tu dire par "en me battant avec le plate solve" ? De quoi est constitué ton équipement (monture, tube, caméra, ...) ?
-
Comment centrer une planète avec une caméra planètaire et Nina ??...
Discret68 a répondu à un sujet de pyrou61 dans Astrophotographie
Par rapport au tableau donné sur le site Astap, j'ai fait quelques essais cette nuit en astrométrie avec une caméra doté d'un "petit" capteur, alias la Neptune C-II. J'ai monté la caméra (sans barlow) sur mon newton de 300 à 1200 de focale. Cette caméra ayant une résolution de 2712 x 1538 et des photosites de 2,9 microns, l'échantillonnage résultant est de 0,5", et le champ couvert de 0,38° x 0,21°. D'après le tableau, le temps de pose "typique" doit être d'environ 50 sec. C'est la base de données H18 qui est installée. J'ai réglé le gain de la caméra à 300 et le temps de pose à 4 sec. Les essais ont été réalisés en différents points de la voute céleste. Avec ASTAP, la résolution s'effectue très rapidement (de l'ordre de 2 sec) dans 100% des cas, il y a juste un message d'alerte (jaune) qui précise que l'image est trop petite. Mais la résolution est effective et juste. J'ai également testé Platesolve 2. Idem, réussite 100% et aucun message d'alerte. La résolution s'effectue également en 2 sec. J'attends une barlow variable 2x à 3x. Je renouvellerai les tests pour essayer de trouver les limites. @pyrou61 : Tu devrais peut-être essayer avec Platesolve 2 avec ta config pour voir si la résolution s'effectue, au cas où ce soit plus probant. -
J’ai l’impression que le diamètre intérieur de ta bague est lisse. Une pratique courante est de réaliser un filetage de manière à créer un bafflage pour éviter les reflets. Pas de cote particulière à respecter, c’est juste pour éliminer la paroi lisse. Il existe également une peinture qui est présentée comme la plus noire au monde : la musou black : https://blackblack1.com/
-
Observatoire en Remote - Aspects informatiques / contrôle à distance
Discret68 a répondu à un sujet de valdetahiti dans Matériel général
A titre d'exemple, tu peux parcourir la page de mon site où il y a encore le premier schéma de pilotage de l'abri, à base d'un IPX : http://astrowick.fr/index.php/observatoire/informatisation Tu devrais trouver des réponses à tes questions. Les contacteurs magnétiques sont généralement des ILS (interrupteur à lames souples). Ils fournissent un contact dit "sec", comme un bouton poussoir. Un IPX comportant des entrées digitales, il suffit de raccorder un des 2 fils de l'ILS à la masse du système et le 2ème à l'entrée digitale. Les capteurs qu'on utilise par exemple dans les systèmes d'alarme vont très bien. Exemple : https://www.amazon.fr/Capteurs-SÉCuritÉ-Domestique-Interrupteur-MagnÉTique/dp/B084ZLL55Q/ref=sr_1_6?__mk_fr_FR=ÅMÅŽÕÑ&crid=1YLWSZPM3JNPF&keywords=capteur+ils&qid=1667232072&qu=eyJxc2MiOiIyLjEyIiwicXNhIjoiMi4wOSIsInFzcCI6IjEuMDUifQ%3D%3D&sprefix=capteur+ils%2Caps%2C253&sr=8-6 On trouve ces capteurs avec des contacts qui peuvent être NO (Normalement Ouvert - Le contact s'établit lorsque l'aimant est devant), NF (Normalement Fermé - le contact est permanent et s'ouvre lorsque l'aimant est devant). Certains capteurs ont les 2 contacts, comme ça, il est possible de changer le mode de fonctionnement selon le besoin. Pour l'IPX V4, tu peux télécharger la notice pour te rendre compte de toutes les possibilités disponibles : https://www.gce-electronics.com/fr/carte-relais-ethernet-module-rail-din/1483-domotique-ethernet-webserver-ipx800-v4-3760309690001.html La doc se trouve dans l'onglet "DOCUMENTS JOINTS". Les entrées analogiques sont pratiques également. Par exemple, il est possible d'avoir un suivi des différentes tensions dans l'abri. A titre d'exemple, pour un copain qui a une coupole souple qui s'ouvre comme une Clamshell, j'avais fixé un potentiomètre sur l'axe de rotation qui délivrait une tension variable en fonction de l'angle d'ouverture. Moyennant une conversion tension/angle, il était possible de suivre l'ouverture et d'arrêter l'ouverture à un angle désiré. L'IPX est vraiment un super boitier de pilotage, pas bon marché, mais vu tout ce qu'il est possible de faire avec, c'est un très bon produit. -
Observatoire en Remote - Aspects informatiques / contrôle à distance
Discret68 a répondu à un sujet de valdetahiti dans Matériel général
Pour la pluie, effectivement, ce n'est pas bon. Mais avec le (par exemple) CloudWatcher Lunatico, tu peux définir les conditions sur 3 à 4 critères (luminosité, nuages,pluie et vent si tu as le capteur externe) que tu considères comme étant bonnes ou pas pour activer le matériel. A partir de là, tu peux largement anticiper le repli des équipements avant la pluie 😎 -
Observatoire en Remote - Aspects informatiques / contrôle à distance
Discret68 a répondu à un sujet de valdetahiti dans Matériel général
Argument complémentaire qui milite pour l'installation d'un mini-PC plutôt qu'un portable. Un écran portable a une résolution maxi qui est limitée par la taille de l'écran. Avec un mini PC piloté à distance, il est possible de choisir une résolution plus importante, voire comme je l'ai fait de se créer une résolution adaptée à l'écran de l'ordi de pilotage. Pour ce faire, on connecte un "dummy" (HDMI ou displayport selon la sortie vidéo) sur le connecteur de sortie vidéo du mini PC. Il est ainsi possible de créer une résolution pouvant aller jusqu'au 4K. Il est nécessaire qu'aucun écran ne soit raccordé au mini PC. Le dummy est en fait un leurre. Sur mon iMac 27" qui présente une résolution de 2560 x 1440, j'affiche les écrans de mes mini PC avec une résolution de 2520 x 1320, ce qui permet d'y visualiser beaucoup plus de chose que ce qu'un écran de portable permet d'afficher. Lorsqu'on est sur place, il est tout a fait possible de brancher un écran standard qui permet de visualiser ce qu'on fait. La résolution bascule automatiquement à la résolution par défaut de l'écran. Un dummy coûte environ une dizaine d'euros. -
RC 8, premier contact, le chemin de croix...
Discret68 a répondu à un sujet de Phil49 dans Astrophotographie
Selon ce qu'on cherche à voir avec l'OCAL (primaire, secondaire, ...) , il faut modifier la luminosité, le contraste et la mise au point. On ne peut manifestement pas tout régler avec un unique réglage des paramètres que j'évoque. -
Observatoire en Remote - Aspects informatiques / contrôle à distance
Discret68 a répondu à un sujet de valdetahiti dans Matériel général
C'est ce que j'avais à l'origine, avec un boitier de 8 relais supplémentaires (X880). Ça fonctionne effectivement très bien et j'en ai été très satisfait. Un des intérêts de ce système est que les relais conservent leur position en cas de coupure de courant. Ainsi, lorsque la tension revient, pas de risque de voir des actions intempestives au niveau du setup. L'intérêt de l'IPX est qu'on peut le piloter (activer/désactiver les relais) via des scripts VBS. Il est ainsi possible de lancer des actions automatiquement durant certaines phases de la séquence d'acquisition. Nina permet de lancer des scripts à n'importe quel moment de la séquence. Par exemple, il est tout à fait possible d'allumer automatiquement un panneau flat en fin de séquence pour lancer une série de flats, puis d'éteindre le panneau flat. En phase finale, on peut couper automatiquement les différentes alimentations. Bien qu'inutilisés actuellement, je conserve mes 2 modules IPX qui seront remis assurément en service le jour où je partirai sur un remote longue distance. Vu que Valdetahiti compte installer son setup dans un "hébergement collectif", la protection vis-à-vis des dégradations de la météo est gérée par l'hébergeur. Pour ce qui est de la validation de la position park de la monture, il est en de même dans un collectif. Je pense que la fermeture du toit est indépendante de la position des setup. je vois mal le système attendre que tous les setup soient en position park pour fermer le toit. Il y en a toujours un qui n'aura pas replié son setup. J'imagine que le setup doit être calé en hauteur sur son pilier de manière à ce que le toit puisse se fermer lorsque le setup présente la hauteur la plus importante. D'un autre coté, ça augmente l'angle mini de visée au dessus de l'horizon. A contrario, en individuel, c'est absolument indispensable. Il faut une protection indépendante du pilotage du setup. Je pourrais interroger informatiquement ma monture pour avoir la confirmation qu'elle est bien en position park, mais je voulais un système de protection totalement indépendant. De mon coté, j'utilise un capteur fixe dans l'abri avec un réflecteur (système utilisé pour les portails) qui est positionné sur la queue d'aronde du télescope de telle manière qu'il n'y ai qu'une seule position où l'alignement capteur/réflecteur est assuré. Tout mouvement du toit est impossible. J'ai juste ajouté un bouton poussoir sur le coffret dans l'abri pour by-passer le capteur de position de manière à pouvoir manœuvrer le toit même si le tube n'est pas en position park. Mais vu que c'est un poussoir, je suis obligatoirement à coté et je vois ce qui se passe. Le bouton poussoir, contrairement à interrupteur, n'engendre pas le risque d'oublier de le remettre dans la bonne position. Tout à fait. Il n'y a rien de pire que de trouver à piloter un setup en remote et en aveugle. -
Observatoire en Remote - Aspects informatiques / contrôle à distance
Discret68 a répondu à un sujet de valdetahiti dans Matériel général
Petites précisions complémentaires : certains équipements sont sous tension en permanence. Les relais par lesquels leur alimentation transite ne servent qu’à couper la tension pendant une courte durée de manière à permettre un redémarrage. Dans le coffret de gestion de l’abri, il y a encore un petit mini-PC qui me permet de tracer les courbes liées aux conditions météo (je me débrouille mieux en VBS.net qu’en python sur RPI) ainsi que la gestion du cloudwatcher. Toutes ces infos sont envoyés en permanence sur le serveur qui héberge mon site internet. Les différents micros (le PC acquisition, le PC météo, le RPI qui gère la allsky et les capteurs de température / hygrométrie / pression atmo et le RPI qui gère les résistances de désembuage des setup) sont pilotés à l’aide de RealVNC à partir de mn iMac. Comme quoi, on arrive à faire cohabiter des mondes différents 😀 -
Observatoire en Remote - Aspects informatiques / contrôle à distance
Discret68 a répondu à un sujet de valdetahiti dans Matériel général
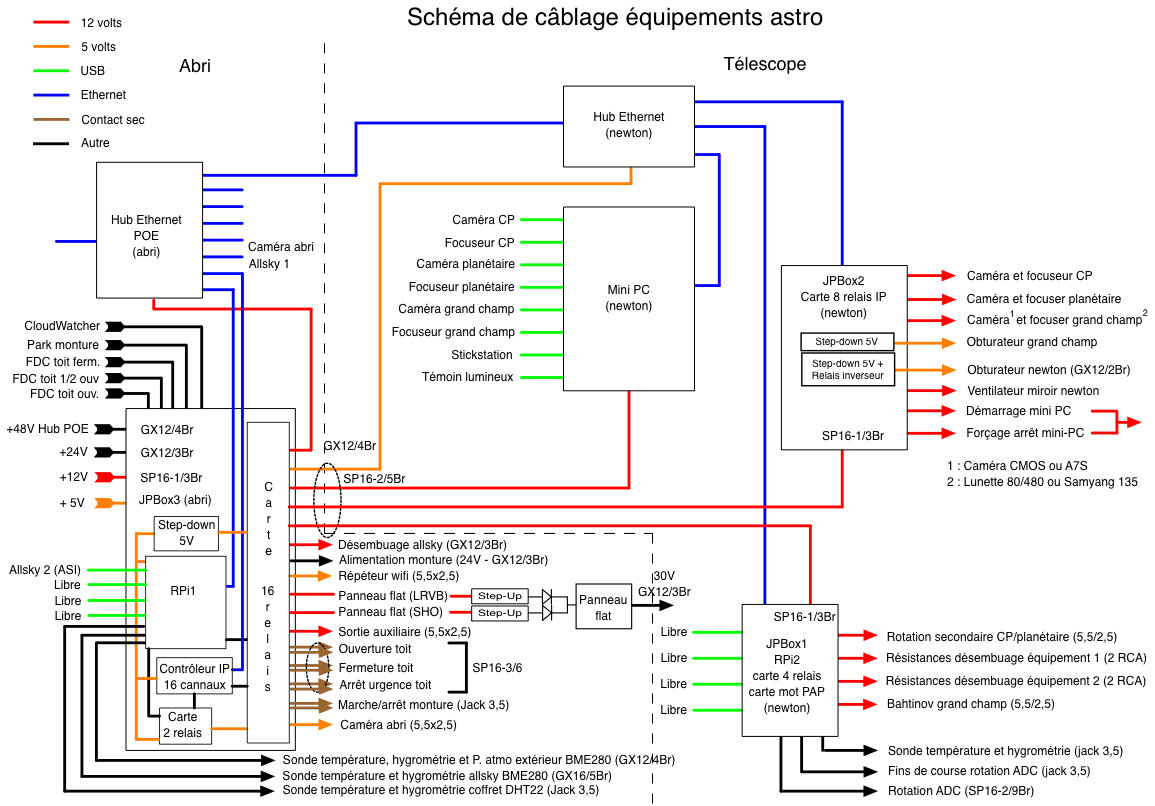
Salut Mon abri est entièrement exploité en remote depuis la maison. Avant de présenter succinctement mon installation, quelques éléments concernant les questions que tu te poses. Concernant l'onduleur, l'alimentation fournie n'est-elle pas déjà sur onduleur. C'est le cas pour de nombreux sites. le fournisseur met en place ce type d'alimentation pour protéger l'ensemble des setup. Pour la mise en service du PC, tu as effectivement le WOL, mais ce n'est pas toujours facile à mettre en œuvre. Il faut voir si le bios de l'ordi permet de le faire. Sur certains PC (tour et mini PC, il y a parfois un connecteur sur la carte qui permet la mise en route et le reset en mettant 2 pins en contact. les contacts d'un relais permettent d'établir la connexion entre les 2 pins. On peut aussi se connecter en parallèle du bouton poussoir de mise en route. On établit le contact entre les 2 fils et l'ordi démarre. En cas de reset nécessaire parce que le menu Windows ne fonctionne pas, il suffit de maintenir le contact durant plusieurs secondes. Concernant mon abri en remote, mon schéma actuel pourrait être considéré comme une usine à gaz, mais je fais tout un tas de chose suite au retour d'expérience de mon premier schéma. Il est clair que si tu es dans un abri groupé, il y a un certain nombre de fonctions que tu n'as pas à assurer. Mon schéma actuel : La partie à gauche du trait vertical en pointillés concerne la gestion de l'abri, gestion que tu n'as pas à priori à assurer, sauf peut-être quelques fonctions (les alimentations de tes équipements, le panneau flat, ..) La partie de droite se trouve physiquement fixée sur le newton, l'objectif est de gérer tous les équipements d'acquisitions. Rapidement : il y a un mini PC (globalement préférable à mon sens à un portable) sur lequel sont connectés directement tous les accessoires astro. Pas de hub et des fils qui sont courts. Une box avec un RPI (JPBox1) et une petite carte relais me permet de gérer les résistances de désembuage des différents setup. Une box contenant une carte à 8 relais se charge de l'alimentation des différents setup (caméras, focuser, ventilateur, ...) ainsi que la manœuvre des obturateurs. Un hub Ethernet permet de distribuer la connexion car tous les différentes box et ordi sont pilotés en Ethernet. Cette approche est bien sûr à adapter en fonction des constituants du (ou des) setup(s).
-
Oui, mais il faut le taraud spécifique et les hélicoïls ! C'est très pratique quand on est un pro, mais au stade amateur, rares sont ceux qui en dispose. On voit sur la photo que la tige filetée ne sort pas beaucoup de la partie mobile de la queue d'aronde. Très peu de filets du bouton en alu subissent la contrainte et avec un serrage "musclé", associé à la faible résistance de l'alu, les filets lâchent.
-
Vu que ces écrous sont relativement courts, il faut juste faire attention à ce que la partie moletée ne vienne pas en interaction avec la queue d’aronde mâle qui va venir se loger dans ta queue d’aronde actuelle. En général, ce n’est pas pour rien que les boutons d’origine sont longs.
-
Bonjour à tous N'arrivant pas à trouver de réponse à ma question en parcourant le net, je me décide à vous la poser. Dans NINA, est-il possible de réduire les dimensions de la capture ? En clair, de faire du ROI ! Ayant une ASI2400MC (capteur FF), il arrive que le champ capturé soit bien trop grand par rapport à la cible visée, notamment pour des galaxies de petite taille. La 2400MC étant relativement sensible, avec un filtre LPS-D2, je tourne fréquemment à un temps de pose de 30s. Cette sensibilité me permet d'empiler de nombreuses images, mais occasionne un stockage important sur le disque (48Mo) par image, et une durée de prétraitement très longue. Alors qu'au final, je vais effectuer un crop "généreux" pour ne garder que la partie intéressante. Dans NINA, il y a bien cette notion de ROI au niveau du focus auto et au niveau de l'onglet Cadrage, mais, sauf si je m'y prends mal, la capture reste à la pleine résolution de la caméra. Merci à vous JP