Discret68
-
Compteur de contenus
2252 -
Inscription
-
Dernière visite
-
Jours gagnés
2
Tout ce qui a été posté par Discret68
-
J'ai également utilisé l'A7S sur ma lulu de 80 avec de nombreuses poses de 30s. A titre de comparaison, j'ai monté une ASI2400MC sur le newton de 300 f/d4. Cette caméra est très sensible et je suis actuellement à des temps de pose de 30s voire moins. Tu imagines le nombre de pose pour une séquence de 8h. Exemple pour NGC7635, je cumule 1700 brutes pour 2 filtres. C'est sûr qu'il faut un disque de bonne capacité et le traitement prend effectivement ..... un certain temps. Si tu en a l'occasion et par curiosité, il serait intéressant que tu regardes à quel temps de pose les étoiles principales ne sont pas saturées avec ton setup.
-
Salut Alexis Quel valeur ISO as-tu utilisé pour tes images ? Sur une cible comme les Pléiades avec des étoiles très brillantes et avec la sensibilité de l'A7S, j'imagine que les étoiles sont saturées au niveau de tes brutes. Je me demande si ça ne serait pas pertinent (si la saturation des étoiles est confirmée) de réduire le temps de pose unitaire tout en conservant la durée totale des poses. Cela permettrait probablement de gagner un peu de finesse sur les étoiles principales. Sinon, la 2ème image met bien en évidence l'IFN, mais de nombreuses étoiles disparaissent. JP
-
Les 7xxx ayant une résistance mécanique élevée, il sont utilisés principalement pour des pièces devant être à la fois légères et soumises à des contraintes importantes. C'est le cas notamment du 7075 qui est utilisé en aéronautique, domaine où le poids des pièces a une grande importance. le 7075 est effectivement 2 fois plus cher que du 2017, mais il est très agréable à usiner, au tour ou à la fraiseuse. La peinture sur l'alu est effectivement une pratique délicate ..... que je pratique également pour la presque totalité des pièces que j'usine. J'ai tenté l'anodisation sulfurique mais échec ! En fait, je pense que l’anodisation était bonne (je dis ça car la couche superficielle était bien électriquement isolante contrairement à la mesure effectuée après décapage à la soude), mais c'est la coloration qui n'a jamais pris, quel que soit le colorant utilisé. Il faudra que je tente à nouveau ! Donc, pour le moment, je me contente de peindre mes pièces. Par contre, je prends de la peinture noir mat haute température de la marque que tu cites, qui me semble présenter une meilleure accroche que la version standard. Après un bon décapage à la soude, mise en peinture en 2 couches légères à quelques minutes d'intervalle pour éviter les coulures. Et vu que c'est une peinture qui est censée résister à la température, après 1 à 2 heures de séchage à l'air libre, je passe mes pièces au four en montant progressivement la température de 50 à 80° et ce pendant une dizaine d'heures. Dans tous les cas, la couche de peinture reste relativement sensible aux chocs. A mon sens, rien ne vaut l'anodisation. Pour ce qui est des filetages, je considère 2 cas de figure : - Pour les taraudages de petit diamètre ( pour de la visserie de fixation), la peinture n'a pas trop tendance à pénétrer. Si je vois qu'une vis est dure au serrage, je repasse un coup de taraud. - Pour les filetages de grand diamètre à pas fin (M48 x 0,75, M90 x 1, ...), je protège systématiquement les parties filetées (mâle ou femelle) de la peinture. Je préfère avoir du métal à nu plutôt que d'avoir une couche de peinture qui empêche le vissage. Dans tous les cas, je préconise de très légèrement graisser (un film) les filetages fins (métal nu ou anodisé) de manière à éviter le grippage. Depuis que je pratique ainsi, plus de soucis de dévissage des différents raccords. J'ai des pièces que j'ai usiné en alu et qui sont restées nues pendant des années et je n'ai pas constaté de dégradation de la surface. De toute façon, l'oxydation de l'alu se fait naturellement en surface au fil du temps, et qui ne produit pas une corrosion perforante comme pour de l'acier. Dans le cadre du procédé MBV, je n'ai pas vu si une coloration est possible.
-

protection de l'aluminium
article a donné son avis sur un(e) TOUBIB33 de Discret68 dans Les bricoleurs
Erreur de saisie 😱 -
Néb plan NGC7635 - Bubulle - Test RC250 - F/8 - Troisièmes Lumières - LRGB
Discret68 a répondu à un sujet de Sephy dans Astrophotographie
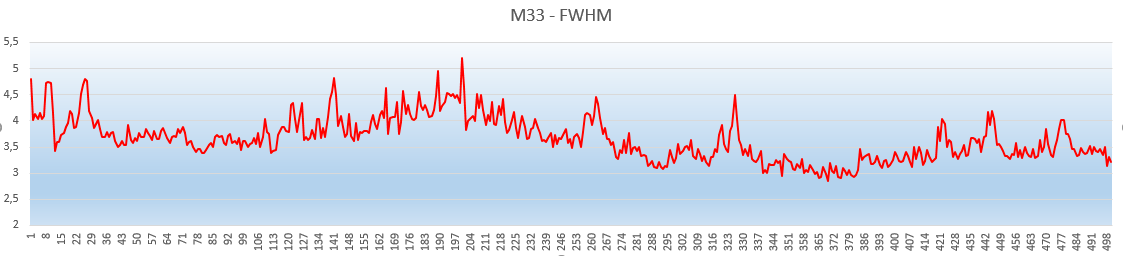
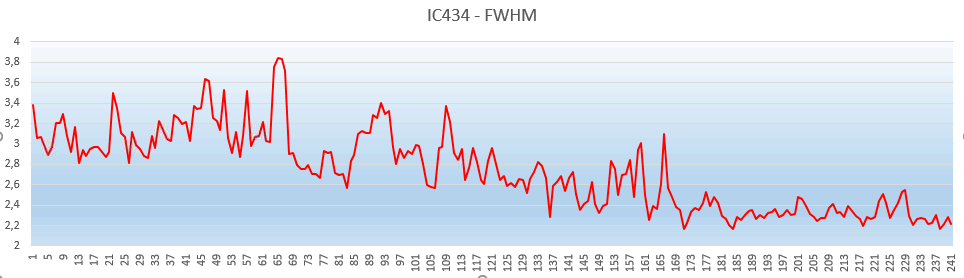
Je suis dans la Plaine d'Alsace, avec un ciel qui n'est pas folichon. Il y a toujours une couche de pollution ou d'humidité qui recouvre la plaine. On voit très bien cette couche qui stagne lorsqu'on monte dans les Vosges. A titre de comparaison avec tes mesures, voici 2 analyses avec mon setup : un newton de 300 en f/d4 avec une ASI2400MC (pixels de 5,94 microns) qui me donne un échantillonnage à 1,02"/pixel. Les résultats sont très variables d'une nuit à l'autre, mais la turbulence est toujours importante. A l’œil nu, on voit bien les étoiles qui clignotent en permanence tout au long de l'année. Une nuit sur M33, 500 poses de 30s. FWHM entre 2,85 et 5,21. Moyenne à 3,66 et médiane à 3,63 : Un petit bout de nuit sur IC434, 240 poses de 20s, FWHM entre 2,17 et 3,84. Moyenne à 2,74 et médiane à 2,71. Une nuit que je pourrais pratiquement qualifier de très bonne ici :
-
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Oui, c'est ça. Le câble fait 1 tour et demi autour de la poulie (vu que les 2 brins partent du même coté). Moi, j'ai un seul toit qui se déplace. Je ne suis pas sûr de comprendre. Dans ton cas, si tu veux que les 2 demi-abris se déplacent en même temps, il faut effectivement avoir le câble qui fait une boucle avec 1 demi-abri accroché à un des 2 brins et l'autre demi-abri accroché à l'autre brin. -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
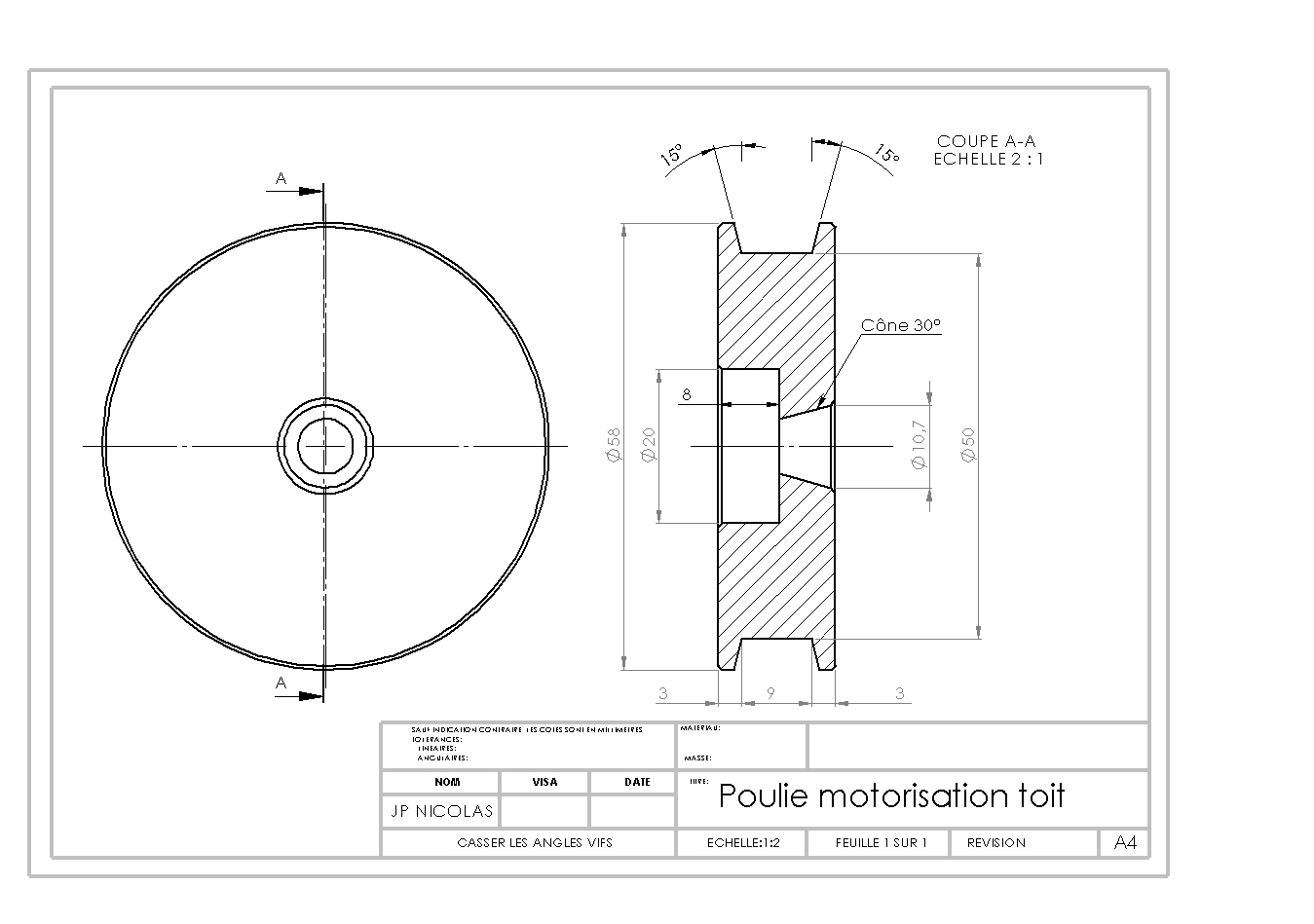
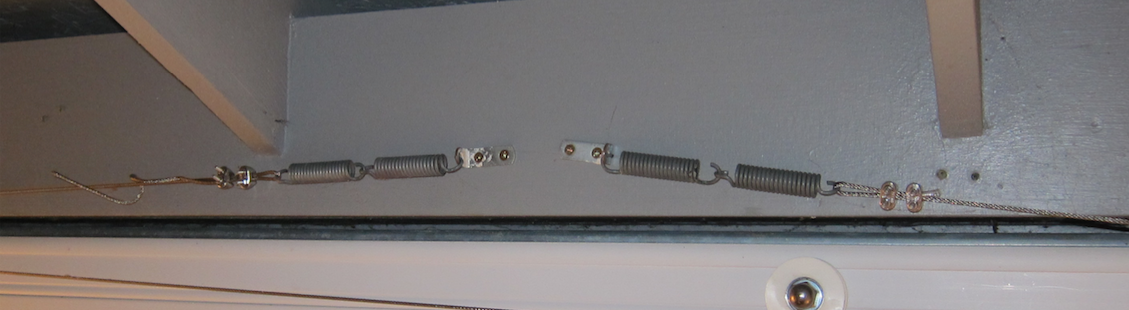
Bon, je vais éviter de me lancer dans la magie car ça risque de partir en vrille. Voici le plan de la poulie d'entrainement du câble inox qui vient se monter en bout d'arbre de sortie du moteur d'essuie-glaces. mais tout dépend du moteur que tu vas utiliser. Pour ce qui est de l'usinage, c'était mon frère à l'époque qui avait usiné cette poulie car je n'avais pas encore de tour.C'est là qu'on arrête la magie 😉 Pour l'usinage, tu peux voir avec Skyméca ou sur le site https://usineur.fr/ sur lequel tu peux trouver quelqu'un qui t'usine la poulie à bon prix. Sur le moteur, il y a une partie conique avec de fines stries qui permettent d'avoir une bonne accroche au niveau de la poulie : Le moteur est fixé sur une plaque en alu. Puis la poulie est fixée en bout d'arbre. le tout est fixé au bâti de l'abri avec des tiges filetées pour permettre le réglage de position de la poulie par rapport au câble, il est préférable d'avoir un bon alignement : Pour que le câble soit toujours tendu, il y a des ressorts positionnés à chaque extrémité du câble. Ces ressorts permettent également d'amortir le déplacement du toit lors des arrêts du moteur. Vu le poids du toit, il y a quand même un peu d'inertie, même si le déplacement est assez lent.
-
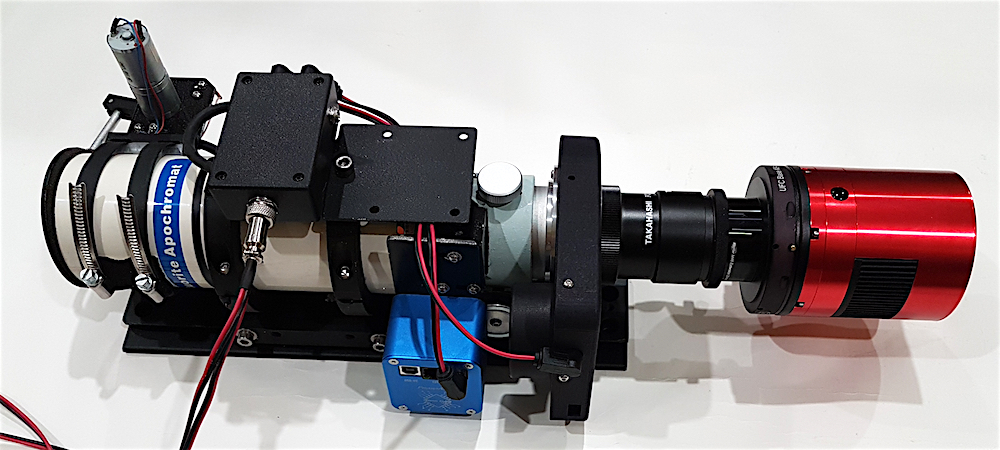
Donc il suffit d'insérer une bague d'environ 20 à 25mm en amont du correcteur pour avoir l'équivalent d'une version CB. J'imagine que ce tube plus court permet d'insérer des accessoires "épais" en amont du correcteur, ce qu'une version CB ne permettrait pas. A titre d'exemple, j'ai installé un rotateur sur ma 60CB. C'était très serré pour arriver à le placer dans le train optique car je voulais qu'il soit au plus près du corps de la lulu pour éviter les contraintes de flexion qu'il pourrait y avoir en plaçant le rotateur derrière le correcteur (bras de levier plus important). Sans le rotateur, le tube sortait d'environ 25mm pour avoir la MAP. Mon rotateur faisant 21mm d'épaisseur, il me reste environ 3mm de sortie de tube. Ca passe pour faire une MAP auto car les déplacements pour la courbe en V ne sont pas très importants. Avec un modèle CSV, cela aurait été plus facile. Comme @FranckiM06 , voici une petite photo de ma 60 : De gauche à droite : l'obturateur motorisé (conçu et réalisé par moi-même. Il faut que je coupe les colliers serflex un peu trop longs), la lulu, les colliers et la queue d'aronde au format losmandy (usinés par moi), le boitier de commande de l'obturateur qui me permet également d'alimenter le rotateur et le moteur de focus, le moteur de focus "PEGASUS FocusCube". Vu que la solution de fixation proposée ne me plaisait pas( une seule vis de fixation, c'est pas top), j'ai usiné une platine support et une pièce de forme triangulaire pour me reprendre sur les 2 trous de fixation du viseur (ce qui m'a permis également de mettre une réduction par poulies crantées), le correcteur, la bague allonge, un porte filtre Baader UFC à tiroir et une ASI2600MC. Cet ensemble vient se monter sur le dos du newton de 300.
-
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Les rails font 2 à 3mm d'épaisseur, en acier zingué. Il y a des trous pour les fixer avec des vis. Chez moi, je n'ai jamais eu aucun soucis. Même pas de trace d'oxydation. Ou alors, tu voulais parler de hauteur ? Si c'est le cas, j'ai pris des rails à gorge ronde de 20, largeur 60mm. Le risque de soulèvement n'est pas présent lorsque le toit est fermé puisque le vent ne peut pas s'engouffrer par le dessous. C'est quand il est ouvert que le risque est le plus important. Et pour le soulever, vu son poids, il doit falloir un sacré vent, et dans ce cas, je n'en connais pas beaucoup qui font de l'astrophoto. Donc, ....... Les galets que j'ai font 60 ou 80mm de diamètre (je ne retrouve plus la commande. Je mesurerai les galets demain) et sont en acier inox avec roulements à billes. Il sont adaptés à la gorge du rail. En général, le galet à une gorge de 1mm plus grand que le rail, pour qu'il puisse rouler sans risque de coincement. A un rail de 19, on a des roues de 20. A une gorge de 20, on a des roues de 21. Par exemple, un rail omega de 20 : https://www.caujolle.fr/fr/rails-et-guidages-de-portail/1534-rail-de-portail-de-3-metres-a-profil-rond-de-19-mm-de-large-a-visser-dans-le-sol-charge-500-kg.html Les roues sont en bas de page. On trouve certainement moins cher en cherchant un peu, c'est juste pour l'exemple. Le type de roue dépend du montage. Il est prudent de prévoir un réglage latéral pour régler l'entre-axe de rails. Par contre, les rails doivent être rigoureusement parallèles, au risque de coincement des galets sur les rails. Au montage, il suffit de fixer le rail d'un coté, de positionner le rail parallèle et de poser le toit (ou l'abri) avec ses galets qui va donner le bon entre-axes. Il suffit ensuite de fixer ce 2ème rail. Chez moi, les galets sont encastrés dans les longerons latéraux du toit : L'entre-axes se règle en déplaçant les galets sur les tiges filetées, puis bloqués avec des contre-écrous : Une page dédiée à la détermination de la puissance nécessaire pour motoriser le toit : http://astrowick.fr/index.php/observatoire/motorisation-toit avec une méthode "simpliste" mais efficace pour déterminer l'effort nécessaire au déplacement. Pour info, mon toit pèse plus de 100kg, et l'effort pour déplacer le toit est inférieur à 5kg. C'est tout l'intérêt des rails et galets en métal. Avec des profilés en U et des roues avec bandage caoutchouc, l'effort sera plus important, d'autant que les bandages vont frotter sur les ailes du U.
-
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Tu fais une recherche sur le net avec « rail oméga portail » et tu en trouveras de toutes les longueurs. il faut prendre préférentiellement des roues inox avec roulements. Vu la vitesse à laquelle se déplace le toit, on entend quasiment aucun bruit. Il faut vraiment être juste à côté pour percevoir un petit bruit. -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Mon câble inox vient également de chez fips. Prendre du multibrins permet d'avoir une grande souplesse. Mon câble est du 7x19 en inox 316 en diamètre 2,5 sans gainage. Ce câble s'enroule sur une poulie entraineuse de 60mm de diamètre qui a été usinée pour se placer directement sur l'axe de sortie du moteur d'essuie-glaces. Pour ce qui est de l'effort de traction, J'ai pris des rails omega qui restent naturellement propres. Avec des roues à gorge en inox, l'effort de traction du toit est de moins de 10% du poids total du toit. Ça fait au moins 6 ans que mon abri est en service et je n'ai pas donné le moindre coups de chiffon sur les rails. Ils restent propre sans rien y faire. Avec des profilés U comme rails, la saleté (feuilles, sable, petits cailloux, ...) va s'accumuler et l'effort de traction va augmenter. Un bandage caoutchouc sur une roue va également consommer plus d'effort de traction. Le contact métal/métal est celui qui permet d'avoir un effort réduit par rapport à la charge roulante. Ce n'est pas pour rien que pour les trains, les roues en métal roulent sur des rails en .... métal. -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
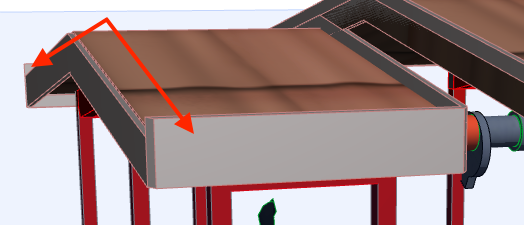
Salut JM Petite remarque par rapport à tes dessins : je ne sais pas si c'est une erreur de ta part ou juste présent pour le dessin, mais il ne faut pas de plaque en bord qui remonte au dessus du toit sinon comment va s'évacuer l'eau ? Il faut plutôt prévoir un débord de toiture pour faciliter l'écoulement de l'eau et éviter qu'elle ne revienne couler le long des parois verticales : J'ai également un moteur d'essuie-glaces pour le toit de mon abri, mais j'ai une transmission à câble inox. L'avantage du moteur d'essuie-glaces, est que la réduction est un système roue/vis sans fin, qui permet d'avoir une réduction de vitesse de rotation importante et de fait, un couple important. De plus, avec cette réduction, la vitesse de rotation en sortie d'arbre est faible, parfait pour ne pas avoir un toit qui est propulsé chez le voisin par une vitesse excessive du toit 😱
-
Comment choisir le correcteur de coma
Discret68 a répondu à un sujet de Erintox dans Support débutants
Une question me taraudait car j'avais un doute pour le MPCC que je n'ai jamais eu entre les mains car j'utilise un correcteur GPU qui est directement en M48. Le schéma où j'ai représenté les filetages M42 et M48 n'est pas bon ! Si tu avais mesuré les diamètres, tu aurais vu que ce n'est pas bon. En y regardant de plus près, on trouve une image du MPCC avec les bagues démontables qui permettent d'utiliser soit sur M42, soit du M48. Les 2 filetages sont mâles : Bref, dans ton cas, il suffit de visser le MPCC dans ta bague APN. Par contre, vu que tu as une bague CANON de 9mm d'épaisseur, il faut récupérer environ 2mm de manque de BF (44 + 9 = 53mm). C'est pour cette raison qu'on trouve la même bague en 11mm d'épaisseur pour arriver directement aux 55mm de BF. Si le filetage T2 fait au moins 5mm de longueur, tu peux intercaler des rondelles de calage en diamètre 42. Il restera 3mm de prise de filetage, ce qui est suffisant. Si tu prends un lot de 3 rondelles ( https://www.pierro-astro.com/materiel-astronomique/accessoires-astronomie/accessoires-t2/lot-de-rondelles-2mm-1mm-0-5mm-pour-filetage-t2-m42-3730_detail ), tu peux obtenir différentes cotes de calage selon l'empilement des rondelles. Si le filetage fait moins de 5mm de longueur, il est préférable de prendre une bague CANON, la même que celle que tu as, mais en 11mm d'épaisseur. Mesures d'abord la longueur du filetage T2 pour voir qu'elle est la meilleure solution.
-
Comment choisir le correcteur de coma
Discret68 a répondu à un sujet de Erintox dans Support débutants
Tout à fait ! Faut juste penser à tourner la bague pour la verrouiller dans l'APN, comme pour un objectif. Normalement, le correcteur MPCC est fait pour rentrer dans le porte-oculaire. C'est la partie cylindrique femelle du porte-oculaire qui est au coulant de 2 pouces (diamètre lisse de 50,8mm), là où tu mets un oculaire pour faire du visuel. Le correcteur se place dans le porte-oculaire une fois que le montage APN/bague de back-focus/correcteur est assemblé. Avec ce montage tu peux tourner l'ensemble dans le porte-oculaire pour orienter l'APN en fonction de ta cible. Le correcteur dispose d'un filetage mâle de M48 et d'un filetage de M42 (T2). Vu que la bague de ton APN est en M42 femelle et vu que le capteur de ton APN fait 22,3 x 14,9 mm (diagonale de 27mm), il est possible d'utiliser une bague de montage en M42 qui présente un diamètre intérieure d'environ 38mm. Pour déterminer la longueur de la bague à intercaler, il faut que tu mesures l'épaisseur de la bague CANON, entre la face d'appui qui vient sur l'APN et la face opposée (face avec la flèche sur l'image ci-dessous), là où viendra se visser la bague à intercaler pour obtenir le bon back-focus pour le correcteur. En général, ces bagues font de 8 à 11mm d'épaisseur selon les fabricants, mais comme ça conditionne directement la longueur de la bague à insérer, autant être précis !
-
Comment choisir le correcteur de coma
Discret68 a répondu à un sujet de Erintox dans Support débutants
Pour une bague dite "T2", le filetage est en diamètre M42: 42mm de diamètre extérieur pour une bague mâle et 41,3 de diamètre intérieur pour une bague femelle. Le M48 fit comme son nom l'indique 48mm de diamètre extérieur pour un filetage mâle et 47,3 de diamètre intérieur pour une bague femelle. Il est clair qu'il n'est pas possible de visser du T2 (M42) avec du M48. Le correcteur MPCC, si c'est bien le modèle dont tu disposes a un filetage T2 (M42) femelle et un M48 mâle : Le coté qui a les 2 filetages est orienté vers l'APN. La bague CANON à baïonnette qui vient se fixer sur l'APN a soit un filetage femelle T2 ou un filetage femelle M48. A vérifier sur ta bague. La bague que tu utilises pour raccorder actuellement l'APN ne sert plus si tu utilises le correcteur. C'est le corps du correcteur (partie opposée aux 2 filetages) qui rentre dans le porte-oculaire. Dans l'ordre de montage (en partant de l'APN), tu auras le boitier de l'APN, la bague CANON avec sa baïonnette qui se vérouille dans le boitier de l'APN, une bague dont les diamètres et la longueur restent à déterminer, puis le correcteur, le tout se montant dans le porte-oculaire. Avant de te donner une solution de montage, il faut vérifier les points que j'ai énoncé. Au final, il faudra une bague supplémentaire entre le correcteur et la bague CANON pour obtenir le bon back-focus.
-
Comment choisir le correcteur de coma
Discret68 a répondu à un sujet de Erintox dans Support débutants
Afin de pouvoir monter l'APN sur le télescope, il faut une bague d'adaptation entre la baïonnette femelle de ton boitier CANON (sur laquelle se fixent tes différents objectifs) et un filetage M48 (de préférence) pour visser les bagues et le correcteur. Exemple de bague pour boitier CANON : https://www.pierro-astro.com/materiel-astronomique/accessoires-apn/bagues-canon-eos/bague-t-m48-grand-champ-pour-apn-canon-eos-tirage-9mm_detail Vu que le backfocus de ton boitier (comme la majeure partie des boitiers CANON est de 44mm ( https://www.univers-astro.fr/fr/content/7-les-backfocus ). La bague dont j'ai mis le lien fait 9mm d'épaisseur, ce qui fait une longueur totale de 44 + 9 = 53mm de backfocus total. Vu que le bakfocus requis par le correcteur est de 57,5mm en M48, il te reste à insérer une bague M48 mâle/femelle de 57,5-53 soit 4,5mm de longueur. Ou une bague moins épaisse plus des rondelles de calage (ex : https://www.pierro-astro.com/materiel-astronomique/accessoires-astronomie/accessoires-m48/lot-de-3-spacer-kepler-m48-de-1-0,8-0,5mm_detail ) Si tu prends une baïonnette en M42, il faut une bague plus courte puisque le backfocus du correcteur est de 55mm, soit une bague allonge de 2mm d'épaisseur. En fait, tout dépend de la baïonnette que tu retiens. Il existe différents modèles : https://www.pierro-astro.com/materiel-astronomique/accessoires-apn/bagues-canon-eos Voila de quoi réfléchir un peu ! -
Comment choisir le correcteur de coma
Discret68 a répondu à un sujet de Erintox dans Support débutants
Ne voulais tu pas écrire "Baader mark 3" ? Si c'est le cas, ce correcteur est utilisable sur les télescopes ayant un rapport f/d entre 3,5 et 6, donc tu peux l'utiliser sur ton 150/750. Point à confirmer. Quant au montage, à la lecture des éléments que tu donnes, il est impossible de te dire pourquoi il t'est impossible de monter ce correcteur 😚 Tu es beaucoup trop vague dans tes explications. Si tu as la baïonnette CANON avec un filetage M42 ou M48, il n'y a aucune raison pour que le montage ne se fasse pas. La problématique que tu peux avoir ensuite est le respect du backfocus, mais ça, c'est une autre histoire. Fais un photo de l'ensemble APN, bagues correcteur, PO télescope et sois un peu plus précis sur ce que tu entends par "impossible à monter" ! -
Développement driver ASCOM
Discret68 a répondu à un sujet de waogll dans Discussions de astronomie avec arduino
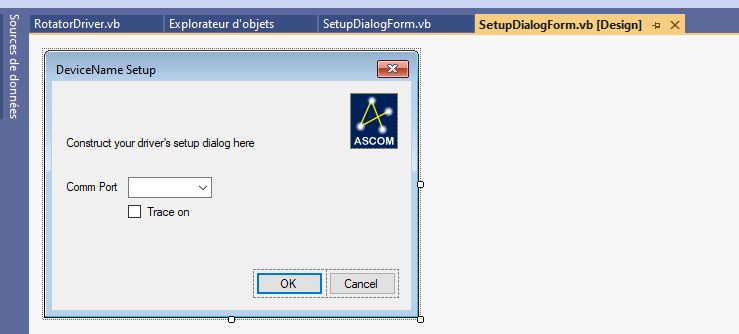
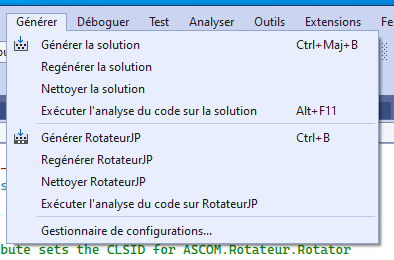
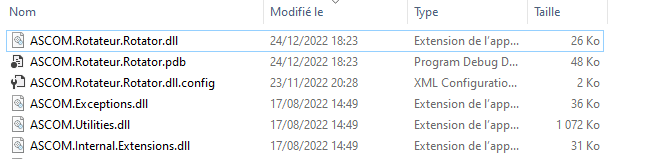
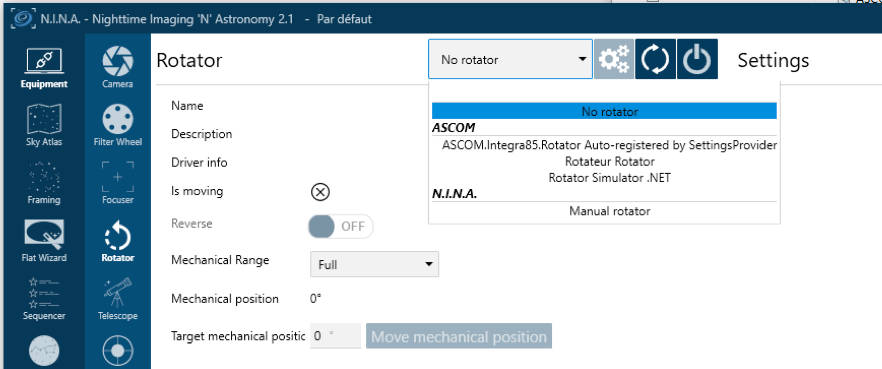
Oui ! Et j'ai bien le terme "Administrateur" qui apparait en haut à droite de la fenêtre de MSV. En fait , j'essaies de créer un driver pour un rotateur. A la création du driver, je l'ai nommé "RotateurJP". Pour le moment, je n'ai fait aucune modification sur le fichier généré. J'ai une ribambelle de code dont l'écran standard : Je lance la commande "Générer RotateurJP" (Ctrl B), En fenêtre de sortie, il apparait ceci : Lorsque je vais dans le dossier bin/debug, rien ne semble se mettre à jour, y compris après rafraichissement de la page : Si je relance la commande "Générer RotateurJP" , le message de sortie est identique est aucun fichier ne se met manifestement à jour. Si le lance la commande ""Regénérer RotateurJP", le message de sortie est le suivant : Et il y a les 2 erreurs signalées dans mon précédent message. Par contre, les fichiers dans le dossier bin/debug se sont mis à jour : Lorsque je lance NINA, au niveau de la liste des rotateurs, voici la liste qui apparait : Il y a bien un rotateur "Rotateur Rotator" dont on retrouve le nom dans MVS : J'ai essayé de remplacer la description dans MVS : Je génère les fichiers qui se mettent à jour dans le dossier bin/debug, mais après avoir lancé NINA, j'ai toujours le nom "Rotateur Rotator" qui apparait. De toute façon, si je sélectionne ce driver, j'ai un message d'erreur de NINA. mais ça, c'est probablement à voir plus tard. J'imagine que les fichiers du driver proprement dit doivent se loger quelques part ailleurs que dans le dossier bin/debug pour pouvoir être utilisés par NINA.
-
Développement driver ASCOM
Discret68 a répondu à un sujet de waogll dans Discussions de astronomie avec arduino
J'ai installé Visual Studio 2022 ainsi que les divers outils ASCOM. J'arrive à créer un projet driver ASCOM, mais dès que je génère la solution, j'ai 2 erreurs qui apparaissent. Et comme les messages sont clairs comme du jus de chique, je ne sais vraiment pas quoi faire. je sens que la production d'un driver ASCOM va être tout sauf un long fleuve tranquille 🤕 De plus, la vidéo en exemple sur le site ASCOM ayant pratiquement 10 ans, compte-tenu de l'évolution des logiciels, je ne sais pas si les modifs opérés dans le programme sont à répercuter aujourd'hui. Je sens que Noël 2022 va rester dans les annales ! J'ai à peu près compris le principe d'un driver ASCOM, mais comme je n'arrive pas à générer mon driver, je ne peux pas aller de l'avant. Joyeux Noël à tous.
-
Où trouver des tubes allonge diamètre 3" ??
Discret68 a répondu à un sujet de xs_man dans Matériel général
Pour commencer, il faudrait établir un plan de ce que tu veux comme tube allonge. Filetages aux extrémités, embout à serrage pour monter un accessoire 3", ... ? De la pièce finie dépend le brut à choisir. Au pire, il peut être nécessaire de recourir à un rond plein. Plein de copeaux, mais selon les dimensions, peut-être pas le choix. Hormis le site cité par Paul Emile, il y a également https://www.metalaladecoupe.com/ et éventuellement http://www.qualichutes.com/catalogue.html , https://www.christianmecaboutique.fr/Accueil-ccbaaaaaa.asp ou https://www.blockenstock.fr/ Pour l'usinage, tu peux voir avec Didier Chaplain (Skyméca) et dans ce cas, pas de recherche de matière à faire et il s'occupe de l'anodisation. Ou faire appel à un usineur privé que tu trouves sur le site https://usineur.fr/ Pour l'anodisation, tu as https://www.eloxalplus.com/ Je n'ai pas encore commandé chez eux mais le devis qui m'avait été transmis était très intéressant. -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Nul besoin d'ajustement. Avec un recouvrement, il faut juste faire barrière "physique" au bords du toit coté ouverture médiane pour que le peu d'eau de pluie qui pourrait être entrainée par le vent qui s'engouffre sous le recouvrement ne puisse couler à l'intérieur de l'abri. Une unique cornière alu de 20x20 (mm) placé coté jonction des 1/2 toits est amplement suffisante pour endiguer le phénomène. Ce ne sont pas des vagues déferlantes qu'il faut arrêter. Un espace libre de 30mm entre les surfaces de 1/2 toits avec 150mm de recouvrement permettent de se prémunir du risque. Il reste 10mm de jeu entre cornière et face inférieure du recouvrement, pas de risque d'accrochage sauf si en dessous, c'est de la breloque 😃 -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Il n'y a pas de profilé sur le toit de gauche, donc pas de risque de blocage lors de l'ouverture des 1/2 toits. Exactement ! 😎 -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
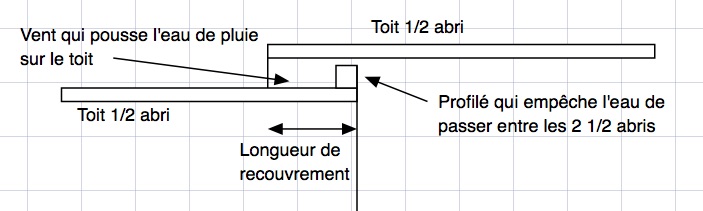
Il faut une zone de recouvrement d'un demi-toit sur l'autre, comme on le fait pour les tuiles, mais en mobile. La longueur du recouvrement et le sens sont à définir en fonction de la direction principale des vents. Et un profil coté partie toit du dessous pour éviter que le vent qui pourrait pousser l'eau sous la zone de recouvrement aille au niveau de la séparation des 2 toits. Comme ça, pas de risque de voir couler de l'eau sur les équipements. Du genre, un schéma vite fait : Pour garantir la mise en position park de la monture, j'utilise un capteur à réflecteur. Le réflecteur est sur le télescope et l’émetteur/récepteur est sur une partie fixe de l'abri. le toit ne peut pas manœuvrer si le capteur détecte que la monture n'est pas en bonne position. En fait, dans l'émetteur/récepteur du capteur, il y a un relais dont j'utilise les contacts pour alimenter l'automatisme du toit. J'ai ce système qui marche sans problème et qui est fiable dans le temps. Ça doit faire environ 6 ans que le mien est en service et je n'ai jamais eu le moindre problème avec. Il est possible d'utiliser le relais interne pour commander des équipements au cas où. Déjà, on attend pas la pluie pour fermer l'abri, c'est un peu tard. Dès que la couverture nuageuse pointe le nez, il est temps de replier le matériel. Certaines manip peuvent se faire en parallèle. On peut très bien parker la monture et fermer le toit en même temps qu'on lance la remontée en température de la caméra, puis couper l'alimentation. Avec NINA, tu peux lancer des actions en série et en parallèle. Avec mon scripts VBS, je lance des actions en parallèle de celles qui sont lancées par NINA. Je ne vois pas bien le soucis. Si tous tes câbles sont bien fixés, il n'y a pas de raison qu'ils viennent se prendre dans des parties en mouvement. A moins que j'ai pas tout compris de ta question. Mon programme est en VB.Net. Si tu arrives à décrypter, je t'enverrai les bouts de code correspondants. Je me suis basé sur les formules données dans le livre "Calcul astronomique pour amateurs" de Serge Bouiges.
-
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Il est assez aisé de récupérer les coordonnées de pointage de la monture via ASCOM. Ensuite, il suffit de convertir les données équatoriales en altaz pour récupérer la valeur azimut de pointage et déterminer quel demi-abri doit se déplacer. Je l'ai fait dans un programme, donc tout le monde doit pouvoir le faire 😉 -
Mon abri automatisé: c'est parti. Des idées et ... plein de questions
Discret68 a répondu à un sujet de JMDSomme dans Les bricoleurs
Salut JMD. Disposer d'un abri à nos "ages avancés" est toujours une facilité pour exercer notre passe-temps, notamment comme tu l'écris, pour ne pas avoir à sortir la nuit. Et de pouvoir disposer d'un équipement disponible immédiatement afin de saisir des opportunités. Est-ce que dans ta notion d'abri automatisé, tu entends bien (ou pas) le fait de tout gérer à distance, même si c'est à quelques mètres ? En clair, programmer une séance acquisitions et retrouver au petit matin l'abri fermé et les équipements à l'état de repli. Vu que sur tes modélisations, tu as représenté un ordi, on pourrait imaginer que ce n'est pas le cas ! Vu que tu parles de maison cévenole, je suppose que tu es soumis aux épisodes du même nom (vent pluie, ...). Cela implique à la structure de résister à cette conditions. J'ai également construit un abri fixe, mais avec un toit roulant. Néanmoins, certains principes peuvent de guider à faire des choix, ou à t'inciter à te poser des questions pour peaufiner ton projet. Je t'invite à aller jeter un œil sur mon site ( http://astrowick.fr/ ), notamment au niveau du menu observatoire et des sous-menus correspondants (construction, modifications, informatisation, motorisation du toit, ..). Sur l'aspect informatisation, j'ai fait encore évoluer le système mais mon site n'est pas encore à jour. Dans mon cas, les séquences photos sont totalement automatisées. Dans le cadre de l'automatisation, il y a effectivement les équipements disposants d'un driver ASCOM, mais il existe d'autres possibilités pour piloter les équipements. Pour certains, j'utilise des scripts VBS, très rapides à mettre en œuvre et qui sont utilisables avec NINA (par exemple). J'en parle dans le menu Bricolage/Développement informatique. Pour le déplacement de tes 2 demi-modules, il y a également les motorisations de portails avec crémaillère. Bonne réflexion. JP