astrojh
-
Compteur de contenus
520 -
Inscription
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par astrojh
-
Observations près de Lavelanet (09)
astrojh a répondu à un sujet de IIIIIKK dans Les rencontres astro
Salut, vous avez eu du courage de patienter jusqu'à 3 heures ! Le timelapse avec le lever de soleil à la fin est très sympa De mon côté je vais me raviser pour ce soir, c'est trop limite par rapport à l'ennuagement... Ce sera pour une prochaine fois ! A+ -
Observations près de Lavelanet (09)
astrojh a répondu à un sujet de IIIIIKK dans Les rencontres astro
Bonsoir, Il n'y a pas eu d'Astrobeille depuis quelques années en effet mais l'idée pourrait être relancée Je pense monter au plateau ce samedi si les prévisions se confirment. Faute d'autorisation pour aller jusqu'au stade de biathlon (je n'ai pas eu de retour à notre demande), je pense m'installer au Pas de Roland si pas trop de camping-cars/vaches/chevaux. Certains sont intéressés pour s'y retrouver ? A+ -
Pb de résolution astrométrique...
astrojh a répondu à un sujet de pti-jean dans Logiciel SIRIL de Siril et Sirilic
Bonjour, La documentation présente la marche à suivre : https://siril.readthedocs.io/fr/stable/astrometry/platesolving.html#using-the-local-astrometry-net-solver Il faut installer le solver puis les fichiers d'index correspondant au champ de vue. A+ -
problème scripts
astrojh a répondu à un sujet de sedno dans Tout sur les scripts ! de Siril et Sirilic
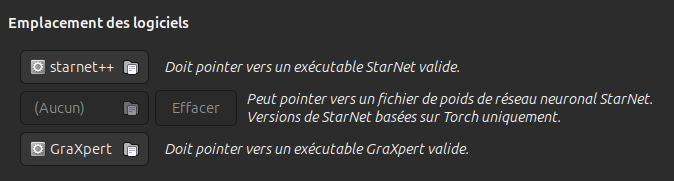
Bonjour, Dans la dernière capture d'écran, à la ligne "Doit pointer vers un exécutable GraxPert valide", on voit que l'exécutable sélectionné est "python.exe" alors qu'il faut sélectionner l'exécutable GraXpert. Première étape : est-ce que GraXpert est installé sur le PC (car ce qu'on voit dans les captures au-dessus est juste l'interface avec Siril) ? Si ce n'est pas le cas, il faut le récupérer sur graxpert.com et l'installer. Une fois fait, il faut cliquer sur l'icône où on voit "python.exe" et aller sélectionner le fichier "GraXpert" qui a été installé à l'étape précédente. A la fin la dernière ligne doit ressembler à ceci:
-
Bonjour, Le champ ATTS(serial) sert à distinguer les devices qui ont le même champ idVendorID:idProduct. Dans ton cas le champ serial est en effet le même pour la monture, l'EAF et le GPS, mais pas les champs idVendor:idProduct (10c4:ea60 , 03c3:1f10 et 1546:01a8 respectivement), il est donc possible de faire un mapping. Pour la monture par exemple, quelque chose de ce genre devrait fonctionner : SUBSYSTEMS=="usb", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", ATTRS{serial}=="0001", MODE="0666", SYMLINK+="EM35Pro" A+
-
Bonjour, Ce problème de connexion se règle en faisant un mapping persistant des ports USB grâce à udev. La méthode est décrite ici : https://indilib.org/support/tutorials/157-persistent-serial-port-mapping.html Plus aucun souci une fois les règles udev sauvegardées 😉 A+
-
Bonjour, Il y a pas mal d'images brutes + calibration sur ce site : https://erellaz.com/moana/open-datasets/ A+
-
Bonsoir, Inutile de passer du temps à mettre exactement à niveau le trépied de la monture, ce qui compte est d'avoir l'axe AD de la monture précisément aligné avec le pôle nord céleste. Si l'horizontalité du trépied était importante, on peut être certains que les constructeurs auraient imaginé et vendu des systèmes bien plus évolués qu'une simple bulle A+
-
C'est parce qu'il faut mettre dans la commande le nom de la séquence et pas "nom-de-sequence" : sequpdate_key pp_lightL_ -delete BAYERPAT
-
Bonjour, L'espace dédié dont parle Cyril est le cadre sous 'Ligne de commande', là où est écrit "Taper 'help' pour avoir la liste des commandes supportées". On le voit en bas à droite de ta capture d'image. A+
-
Observations près de Lavelanet (09)
astrojh a répondu à un sujet de IIIIIKK dans Les rencontres astro
Bonjour à tous, La neige se retirant doucement du Plateau de Beille, c'est le moment de remonter le fil de discussion pour relancer les demandes d'autorisation de circuler, nécessaires pour rejoindre le stade de biathlon où on s'installe habituellement pour observer / photographier. Si vous êtes intéressés par une autorisation, envoyez-moi par MP les informations suivantes : Prénom, Nom, Véhicule (marque, modèle, couleur), Immatriculation. Je rassemblerai et enverrai nos demandes à la mairie de Luzenac d'ici la fin du mois. A très bientôt ! -
Document sur le retournement au méridien avec KSTARS
astrojh a répondu à un sujet de rmor51 dans Software de Linux et astronomie
Bonjour, il faut être connecté pour pouvoir la récupérer. -
Help Kstars / Ekos, résolution des images
astrojh a répondu à un sujet de Messier31 dans Astrophotographie
Bonjour, As-tu essayé en définissant un nouveau train optique pour voir si les bonnes valeurs sont prises en compte ? A+ -
Help Kstars / Ekos, résolution des images
astrojh a répondu à un sujet de Messier31 dans Astrophotographie
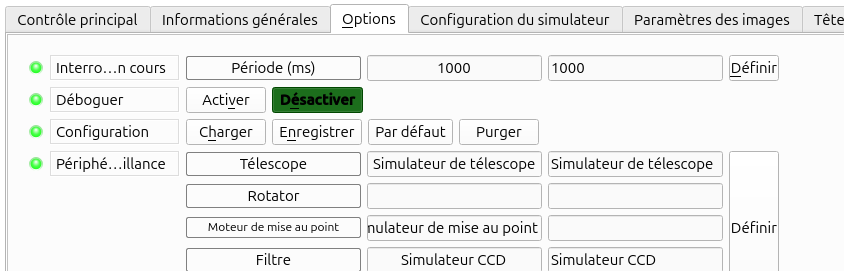
Dans le tableau de bord Indi, rubrique "Canon...", il faut aller dans l'onglet "Options", le bouton "Enregistrer" se trouve à la troisième ligne (ligne "Configuration") :
-
Help Kstars / Ekos, résolution des images
astrojh a répondu à un sujet de Messier31 dans Astrophotographie
Vérifie s'il n'y a pas un bin 2x2 indiqué dans l'onglet d'alignement car si tu multiplies par 2 les dimensions de ton image (1953 * 1301), tu n'es pas loin de la taille du capteur du 1000D. -
Help Kstars / Ekos, résolution des images
astrojh a répondu à un sujet de Messier31 dans Astrophotographie
Merci ! On voit que la config pour le 1000D n'est pas bonne (première figure), il faudrait 3888 pour la largeur et 2592 pour la hauteur. Il suffit d'éditer les valeurs et sauvegarder. Après déconnexion/reconnexion du 1000D les bonnes valeurs doivent apparaître dans l'onglet capture. A+ -
Help Kstars / Ekos, résolution des images
astrojh a répondu à un sujet de Messier31 dans Astrophotographie
Pour vérifier la configuration il faudrait : depuis le panneau Indi, le tableau des paramètres images indiqués pour chaque caméra (acquisition et guidage) l'onglet Capture l'onglet Guidage A+ -
Help Kstars / Ekos, résolution des images
astrojh a répondu à un sujet de Messier31 dans Astrophotographie
Bonjour, Ce qui est étrange, c'est qu'aucune des deux tailles d'image ne correspond au capteur du 1000D. Normalement ça devrait être 3888x2592 pixels... Pourrais-tu partages des captures d'écran de ta configuration ? A+ -
Bonjour, J'utilise également Remmina pour communiquer avec mon raspberry Pi installé sur la monture, depuis mon laptop sous Ubuntu, ça marche parfaitement. Pour y accéder, le plus simple est d'utiliser le nom de ton mini pc MELE attribué sur le réseau local plutôt que son adresse IP, la box fait le lien entre les deux, même si l'adresse IP change (ce qui est d'ailleurs peu probable). Pour connaître le nom il suffit d'aller dans les paramètres windows ou de scanner son réseau depuis le portail de gestion de ta box. A+
-
Bonjour, C'est vrai qu'à une certaine époque (disons jusque vers 2010) c'était le cas car les marchés de NVidia étaient alors surtout le jeu et le graphisme, donc essentiellement les mondes Windows et Mac. Les drivers propriétaires NVidia pour Linux étaient parfois peu stables et NVidia ne partageant pas les specs de ses cartes, l'implémentation de pilotes libres (en particulier "nouveau") était délicate. Depuis NVidia s'est fortement intéressé à l'écosystème Linux, et a développé des drivers stables et performants, bien que toujours propriétaires. Et aujourd'hui environ 90% des systèmes d'IA reposent sur le couple Linux / NVidia Il n'y a donc pas de problème particulier, il faut juste faire attention à choisir la version de CUDA compatible avec le driver de la carte (cf tableau 3 sur cette page : https://docs.nvidia.com/cuda/cuda-toolkit-release-notes/index.html#cuda-driver). La procédure d'installation est ici : https://docs.nvidia.com/cuda/cuda-installation-guide-linux/ A+
-
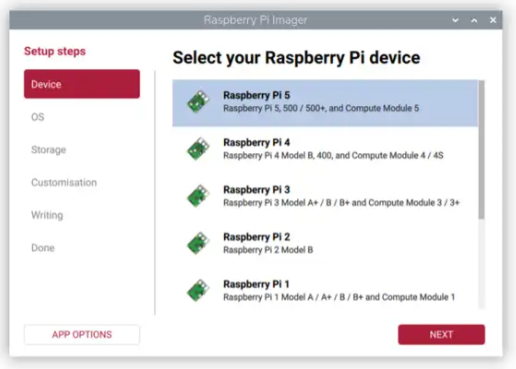
Bonjour, Merci pour le doc, très clair et très complet Juste une petite remarque : l'installation de la dernière version de Raspbian (Trixie) avec Pi Imager (décrite en section 2 page 4) nécessite une version 2.x.x de Pi Imager car sinon les options de customisation du système (hôte, utilisateur, wifi, langue, etc.) ne sont pas prises en compte... Le doc présente par contre l'interface de l'ancienne version 1.8.5 de Pi Imager, qui donc ne fonctionne pas correctement pour Raspbian Trixie. Il faudrait peut-être mettre à jour ces figures pour qu'elles correspondent à la version 2.x.x de Pi Imager et éviter toute confusion, qu'en penses-tu ? Les différences entre les deux interfaces sont visibles sur ce post : https://www.raspberrypi.com/news/a-new-raspberry-pi-imager/ A+
-
Bonjour, Le mieux est de suivre les tutos officiels de Siril, ici : https://siril.org/fr/tutorials/ En particulier le pré-traitement : - avec les scripts automatiques : https://siril.org/fr/tutorials/first-steps/ - ou en manuel : https://siril.org/fr/tutorials/tuto-manual/ A+
-
A mon avis ce sera bien plus simple de t’entraîner sur des images acquises avec des instruments plus "classiques", par exemple ici il y a de quoi faire : https://erellaz.com/moana/open-datasets/
-
Bonsoir, Juste pour apporter des précisions sur les points que tu soulèves : - Le binaire LuckyStackWorker n'est pas exécuté en tant que root, il est lancé sans aucun privilège. C'est uniquement le sandbox chrome qui doit être possédé par root. Le sandbox est fait justement pour augmenter la sécurité (https://chromium.googlesource.com/chromium/src/+/HEAD/docs/design/sandbox.md) et il se trouve d'ailleurs dans le répertoire /opt/google/chrome par défaut. - Les sources du logiciel sont bien disponibles, en bas de la page https://github.com/wkasteleijn/luckystackworker/releases/tag/v7.0.0 Et en cas de doute c'est toujours possible / préférable d'installer dans un docker (et je confirme que ça marche très bien)
-
Bonjour, C'est étrange que cela ne fonctionne pas. Pourrais-tu préciser quels fichiers JWST tu as récupérés ? As-tu essayé d'ajuster la détection des étoiles, comme indiqué dans la doc Siril (cf mon post plus haut) ? As-tu essayé aussi avec des fichiers autres que ceux du JWST ? A+