Discret68
-
Compteur de contenus
2252 -
Inscription
-
Dernière visite
-
Jours gagnés
2
Type de contenu
Profils
Forums
Téléchargements
Blogs
Boutique
Calendrier
Noctua
Tout ce qui a été posté par Discret68
-
Non, je veux dire passer un câble Ethernet (ou une fibre) dans la même gaine qu'un câble 230V. On ne doit pas associer dans une même gaine, des faibles tensions avec du 230V.
-
C'est un très bon débit ! Avec ma solution wifi qui date d'il y a environ 10 ans, je suis au dixième de ton débit .... et encore quand ça ne plante pas ! Va falloir que je regarde ce système de plus près. Dans mon cas, l'idéal serait de tirer un câble Ethernet ou une fibre entre la maison et l'abri. Mais je n'ai que la gaine ou transite le secteur qui est disponible. Impossible dans mon cas de tirer une nouvelle gaine. Normalement, on ne mélange pas les réseaux COM avec du secteur. Mais bon .....
-
Finalement, tu pilotes à distance ou pas ? JP
-

Mes bagues réductrices sont "coincées"
Discret68 a répondu à un sujet de Hubus dans Matériel général
De toutes les solutions que j'avais essayé, ces clés à sangle sont d'une redoutable efficacité. D'une manière générale, les filetages alu sur alu, c'est toujours source de grippage. Je passe toujours un petit peu de graisse avec un coton tige sur les filetages, les démontages ultérieurs n'en sont que facilités. PS : j'ai bien dit "un peu de graisse", un film ! il ne faut pas baigner chaque bague dans le pot de graisse 😆 JP -
Mais non, tu verras, tu refais le traitement complet dans 2 mois et tu constateras probablement une amélioration. Ainsi va la vie 😉 En analysant "finement" ton image (à l’œil), tu as effectivement amélioré ton image initiale. Il y a moins de bruit sur le fond de ciel et manifestement pas de perte d'étoiles. Tes étoiles sont juste un tantinet plus grosses que sur la première image, mais c'est vraiment infime de chez infime. Il faut trouver 2 étoiles très proches (tu me diras, dans un AG, ce n'est pas ce qui manque) pour constater l'effet, mais c'est vraiment très minime. Il faut être un peu pervers comme moi pour constater le phénomène. Moi, à ta place, j'en resterais là car l'image est belle comme elle est. A force d'insister, tu risques de dégrader ton résultat ! JP
-
Je pense que la perte est bien plus importante. En passant à l'échelle 1, j'ai comparé la 1ère (à gauche) et la 3ème (à droite). La perte est importante sur la 3ème. Il suffit de regarder la densité d'étoiles sur la partie droite de l'amas, vers les 2 étoiles. De plus, le cœur est plus "pâteux". Le bruit sur le fond de ciel a par contre été effectivement réduit : Le traitement d'une image est rarement ais,é et gagner sur tous les tableaux est un exercice difficile ! JP

-
Je pense que la perte est bien plus importante. En passant à l'échelle 1, j'ai comparé la 1ère (à gauche) et la 3ème (à droite). La perte est importante sur la 3ème. Il suffit de regarder la densité d'étoiles sur la partie droite de l'amas, vers les 2 étoiles. De plus, le cœur est plus "pâteux". Le bruit sur le fond de ciel a par contre été effectivement réduit : Le traitement d'une image est rarement ais,é et gagner sur tous les tableaux est un exercice difficile ! JP
-
Gal Galaxie NGC4236 - C8 - Player One Artemis-c imx294 -Optolong L-Quad - 13/05/2024
Discret68 a répondu à un sujet de sebseacteam dans Astrophotographie
Salut Seb Je confirme, une galaxie pas facile à imager et à traiter. Tu as quand même une évolution significative entre tes images de 2022 et celle de ce post 2024. Pourtant, tu as le même équipement. Il y a juste le nombre d'images qui est passé de 52 à 78 (+50%). Est-ce que c'est le seul critère qui amène cette évolution du rendu ? Ou alors, tu as changé le mode de traitement ou progressé (certainement) dans le traitement des images ? Jean-Pierre -
Très bon rendu de cet amas avec des étoiles bien fines. Il y a également M92 dans le secteur qui est un amas comparable. Si je peux me permettre une petite remarque, il y a juste le fond qui pourrait faire l'objet d'une petite réduction complémentaire de bruit. Ça se voit surtout sur l'image à l'échelle 1. JP
-
La Baleine NGC 4631 et la crosse NGC4656, nouveau matériel
Discret68 a répondu à un sujet de Nimbus dans Astrophotographie
Il faut aussi prendre conscience qu'il y a beaucoup plus de glands qui restent des glands (voire pire) par rapport aux glands qui deviennent réellement de grands chênes 😄 Sinon, pour @Nimbus, je ne te fais pas de commentaires complémentaires vu que j'ai déjà réagit de l'autre coté du trottoir 👍 JP -
Trio du dragon (poses mi courtes; T350)
Discret68 a répondu à un sujet de Haltea. dans Astrophotographie
Très bon rendu de ce groupe avec des couleurs chatoyantes 👍 JP -
Peut-on associer Roue à filtre + tiroir à filtre ?
Discret68 a répondu à un sujet de bs33 dans Matériel astrophotographique
Ben moi, je pense que c'est faisable du moment que le capteur de la caméra n'est pas soumis à un vignettage mécanique. Dit d'une autre façon, tant que le cône de lumière n'est pas impacté par le diamètre de passage d'un filtre ou du logement de filtre, je ne vois pas pourquoi cela ne serait pas possible. A ma connaissance, il n'y a pas d'imposition à respecter une distance entre filtre et capteur, si ce n'est le risque de vignettage mécanique. Une question similaire avait été posée concernant le montage de 2 RAF en série pour augmenter le nombre de filtres exploitables. Vu la taille "réduite" du capteur de la 533 (11,3 x 11,3, ce qui fait 16mm de diagonale) ,les 61mm de diamètre d'objectif et la focale de la lulu, le cône est relativement "long". Ce qui importe, c'est d'avoir les filtres ayant le plus faible diamètre au plus près de la caméra (la RAF) et le tiroir avec le plus grand filtre qui suit coté lulu. Bon, c'est quand même un peu scabreux comme montage. Il est vrai que, comme l'indique @schizophrene, il serait préférable de prendre un L-Extreme en 36 (pour une fois que bas-rhinois et haut-rhinois sont d'accord 😚 ), d'autant que ta RAF ne me semble pas très remplie par des filtres. Vu le nombre de bagues que tu vas devoir acheter pour connecter RAF et tiroir, l'achat d'un filtre peut se révéler être un meilleur choix. D'où sors tu cette valeur de 55mm de back-focus ? Tu as un aplanisseur de champ sur ta lunette ? Car si tu n'as rien, cette valeur n'a pas lieu d'être. Je sais que ZWO fait souvent allusion à un BF de 55mm dans ses explications, mais cette valeur ne rime à rien, sauf pour ceux qui ont un newton avec un correcteur GPU dont le BF est effectivement de 55mm. Si c'est un montage très courant, il y en a bien d'autres, et tu n'es pas dans ce cas JP. -
Messier 101 en LRGB et en 91,5 minutes seulement
Discret68 a répondu à un sujet de schizophrene dans Astrophotographie
Très bon résultat. L'image est propre. JP. -
Changement de tube, besoin de vos avis éclairé
Discret68 a répondu à un sujet de T350 dans Matériel astrophotographique
Y'a pas à dire, tu es vraiment né sous une mauvaise étoile ! Un comble 😄 Première tentative : JP
-
Changement de tube, besoin de vos avis éclairé
Discret68 a répondu à un sujet de T350 dans Matériel astrophotographique
Avec un tube comme celui là, la pauvre EQ8 va souffrir, d'autant que la fixation Losmandy d'origine me parait plutôt relever du gag ! J'ai un ONTC1212 et j'ai des colliers et des queues d'aronde usinés sur mesure, histoire d'avoir quelque chose de rigide, surtout pour de l'imagerie. Un truc d'homme en fait 😁 Un anneau pèse 2kg, idem pour chaque queue d'aronde, soit 8kg en plus. Coté PO, il faudrait bien évidement un modèle 3" avec une course qui n'a pas besoin d'être importante. Mes différents focuser (FLI PDF, Integra85) ont moins de 10mm de course. En Photographie, une fois que le point de MAP est trouvé, nul besoin d'avoir une course importante. Vu le poids au niveau du PO (train optique), il est préférable de rigidifier la zone pour éviter les déformations. On aperçoit les profilés de rigidification de la partie PO sur cette vidéo qui, accessoirement, présente l'obturateur motorisé pour protéger l'intérieur du tube. On y voit également l'araignée que j'ai usiné sur mesure, là également pour avoir un système plus rigide qui tient la collimation : En partie arrière, il est pertinent de mettre une plaque de fond avec un ventilateur pour balayer et refroidir le primaire en été : Et le tube aujourd'hui avec tout son accastillage, l'ordinateur, les boitiers relais, ... et le train optique en 3" pour la 2400MC .... et la lulu sur le dos : Tout ça pour dire que si tu veux conserver l'EQ8, le diamètre du tube est peut-être à reconsidérer. JP
-
Ames sensibles, s'abstenir !
Discret68 a répondu à un sujet de Michel Boissel dans On fait une pause
Le cuivre étant passé au dessus des 9000 euros la tonne en rachat ferrailleur, il faut malheureusement s'attendre à une recrudescence de ce genre d'acte criminel. D'ailleurs, tout vol est un acte criminel ! On vole bien les métaux dans les cimetières !!! JP -
Changement de tube, besoin de vos avis éclairé
Discret68 a répondu à un sujet de T350 dans Matériel astrophotographique
Moi qui ai ce type de barillet sur mon 300, je peux te confirmer que ce montage est hyper rigide. Aucune crainte à avoir en ce qui concerne la résistance mécanique du système. Il est évident que les vis de liaison doivent être bien serrées, sinon, ..... Un système taillé dans la masse est peut-être plus joli, mais pas forcément plus résistant. Par contre, ça peut être également plus cher à fabriquer pour finalement aucun gain en terme de résistance. Il faut juste se méfier des apparences. Ce n'est pas la masse qui fait la résistance d'une structure mais c'est la forme des constituants et leur positionnement dans l'assemblage (vissé ou soudé) qui sont importants. Pour s'en convaincre, il suffit de prendre une règle en plastique. Mettez la à plat et constatez comme elle plie. Mettez la sur le chant, elle devient extrêmement rigide. Et pourtant, elle a la même section et la même masse ! Seul un calcul de résistance des matériaux peut confirmer ou infirmer la viabilité d'un système. JP -
J'ai une 400W, mais qui à l'époque n'était pas du type modulaire, c'est à dire qu'il sort un toron de câbles qui prend du volume et qui ne sert à pas grand chose pour l'astro. Aujourd'hui, on trouve des alimentations modulaires qui sont équipées de connecteurs sur le boitier. De cette manière, tu y raccordes uniquement les câbles dont tu as besoin et c'est tout. C'est plus propre. Exemple d'alimentation modulaire : https://www.grosbill.com/alimentation/msi-atx-650w-80-gold-mag-a650gl-137428.aspx ou https://www.ldlc.com/fiche/PB00548059.html C'est sûr que 600W, c'est surdimensionné pour un besoin astro, mais en modulaire, c'est ce qui se fait (à priori) de "moins" puissant. Par contre, ce type d'alimentation n'est pas fait pour se retrouver directement en extérieur, aucune étanchéité n'existant sur ce type d'alimentation. Si ton intention est de l'utiliser temporairement en extérieur, il faut l'installer dans un coffret qui protège de la condensation et avec des ouïes de ventilation. A voir également si des câbles sont fournis ou pas avec cette alimentation. Le mieux étant d'appeler le vendeur pour en avoir le cœur net.
-
Largement. En temps normal, on compte 10A/mm2.
-
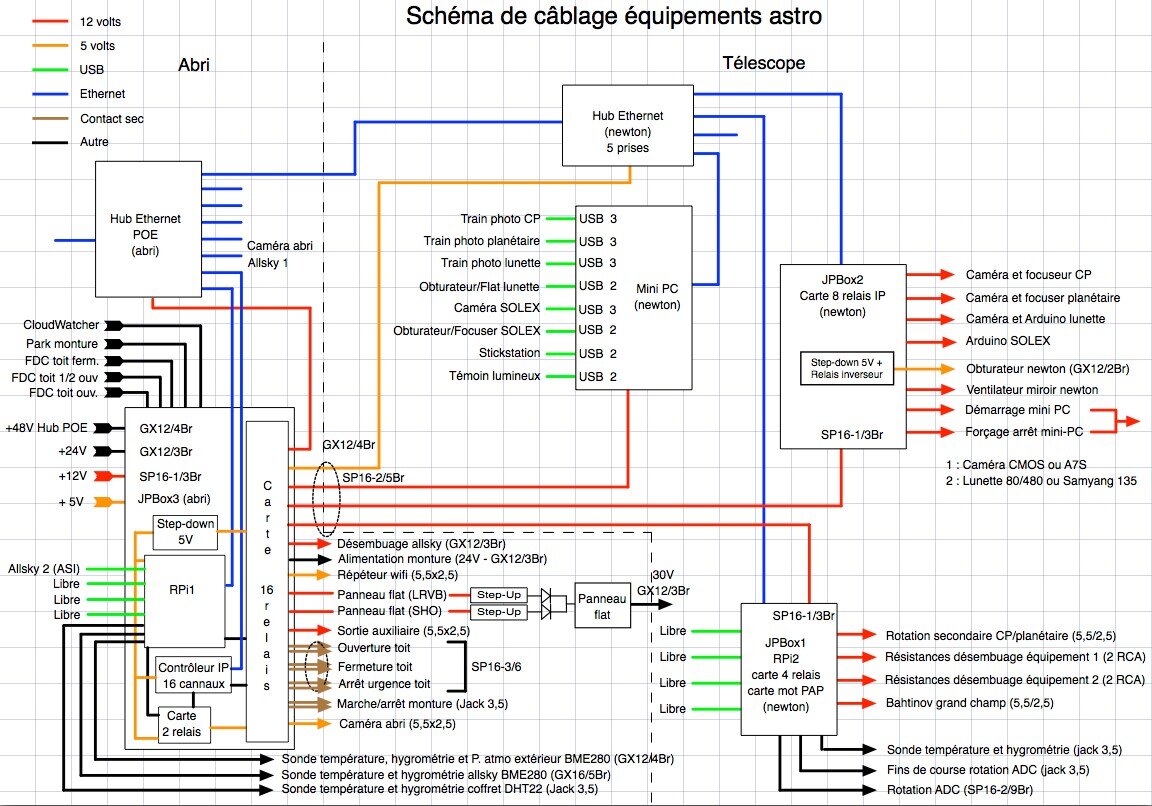
Tout à fait. Il faut juste utiliser les connecteurs ad'hoc pour connecter les sorties 12V de l'alimentation et éventuellement 5V. Pour ce qui est du schéma, j'ai un schéma qui montre l'intégralité du câblage de l'abri. Attention, ça peut piquer les yeux 😄 Il y a énormément de choses dont tu n'auras surement pas besoin. J'ai une installation un peu "extrême" qui fait à peu près tout, sauf le café, mais uniquement parce que je n'ai pas mis de cafetière dans l'abri. En fait, le pilotage de 3 setup est possible et tout l'abri ainsi que les composants contenus sont sous contrôle. Une partie des équipements de pilotage électrique se situe directement sur le télescope (ordinateur acquisition, boitier de pilotage des équipements, HUB Ethernet, Boitier de gestion des résistances de désembuage en fonction des conditions extérieures, ...). Après, tout dépend du degré d'automatisation que tu veux ... ou pas. Si c'est simplement pour avoir du 12V afin d'alimenter les différents accessoires, une simple alim, des interrupteurs et des prises suffisent. Et une petite vue de l'installation : JP
-
Tout à fait. Du 12V, c'est du 12V ! Il faut juste respecter les polarités et aucun soucis. Comme dit, ça fait plus de 6 ans que j'utilise ce type d'alimentation avec des équipements que j'ai déjà fait évoluer et jamais eu de problème. Une alimentation unique, c'est beaucoup mieux que tout un tas de petits blocs d'alimentation.
-
De mon coté, j'utilise une alim d'ordinateur (unique) qui produit du 12V et du 5V, cette dernière tension est parfois nécessaire pour certains appareils. L'alim est une 600W, de quoi fournir la puissance à tous les équipements. Cela fait au moins 6 ans que ça tourne sans broncher. Derrière cette alim, j'ai différentes cartes relais (gestion abri, gestion équipements sur les setup, ..) qui sont pilotées à distance, soit via une interface que j'ai développé, soit via des scripts VBS qui me permettent d'automatiser tout un tas de fonctions, notamment pour le repli complet de mon abri et des équipements à l'intérieur (2 setup), vu que je suis en remote. Les scripts VBS sont une alternative aux drivers ASCOM qui n'existent pas pour tous les équipements pilotables, notamment les cartes relais qu'on peut trouver sur différents sites marchands. Et comme je peux commander également ma monture (une GM2000HPS) via script VBS, je peux combiner les actions dans un seul script (ex : mettre le newton en vertical pour permettre l'ouverture ou la fermeture de l'obturateur, mettre la monture en position park, mettre à l'arrêt la monture, couper son alimentation, fermer le toit de l'abri, couper l'alim des équipements, ...). Commuter exclusivement du 12V via des cartes relais, c'est aussi beaucoup plus sécurisant que de commuter une tension secteur. JP
-
les caméras sont de plus en plus sensibles, et c'est tant mieux pour nous, vu les conditions météo auxquelles nous sommes confrontés. Les évolutions futures vont certainement nous permettre d'être encore plus productifs, c'est à dire, ne plus consacrer des heures d'acquisition, mais (peut-être) quelques minutes. Quand on voit l'évolution entre le CCD et le CMOS, on peut pressentir l'avenir. Juste pour participer au "petit jeu" que tu viens de lancer ( ☺️ ), voici une brute de ce même triplet, prise avec la 2400MC (qui est une caméra que je trouve très sensible) sur le newton de 300 en f/D 4. Il n'y a aucun traitement de darks, flats, bias. J'ai passé un petit coup de BlurXTerminator, NoiseXTerminator, passage en non linéaire, SCNR pour enlever l'excédent de vert et une accentuation des couleurs pour la rendre regardable. La durée d'exposition de cette brute est de seulement 30 secondes. Non, tu ne rêves pas, c'est bien 30s 😉 : JP
-
Arp 104 (le Système de Keenan) sous la pleine lune francilienne
Discret68 a répondu à un sujet de danielo dans Astrophotographie
Effectivement, avec mes 2h, je peux aller me rhabiller !