Aperçu
À propos de ce club
Bienvenue dans le club Linux et astronomie.
Le but de ce club est de regrouper l'ensemble des sujets traitant du monde de Linux et des logiciels astronomie. Tout le monde peut participer sans restriction.
- Quoi de neuf dans ce club
-
 SauvageonAstro s’est inscrit au club
SauvageonAstro s’est inscrit au club -
 PierreF8APV s’est inscrit au club
PierreF8APV s’est inscrit au club -

Quel pilote INDI pour une Celestron SLT ?
rmor51 a répondu à un sujet de rmor51 dans Software de Linux et astronomie
Merci Patrick. -

Quel pilote INDI pour une Celestron SLT ?
pch a répondu à un sujet de rmor51 dans Software de Linux et astronomie
Salut, D'après la doc INDI c'est indi_celestron_gps. En tout cas le SLT est indiqué ici: https://drivers.indilib.org/mounts/celestron/celestron-gps/celestron-gps/ -
Quel pilote INDI pour une Celestron SLT ?
un sujet a posté rmor51 dans Software de Linux et astronomie
La question est dans le tire. -
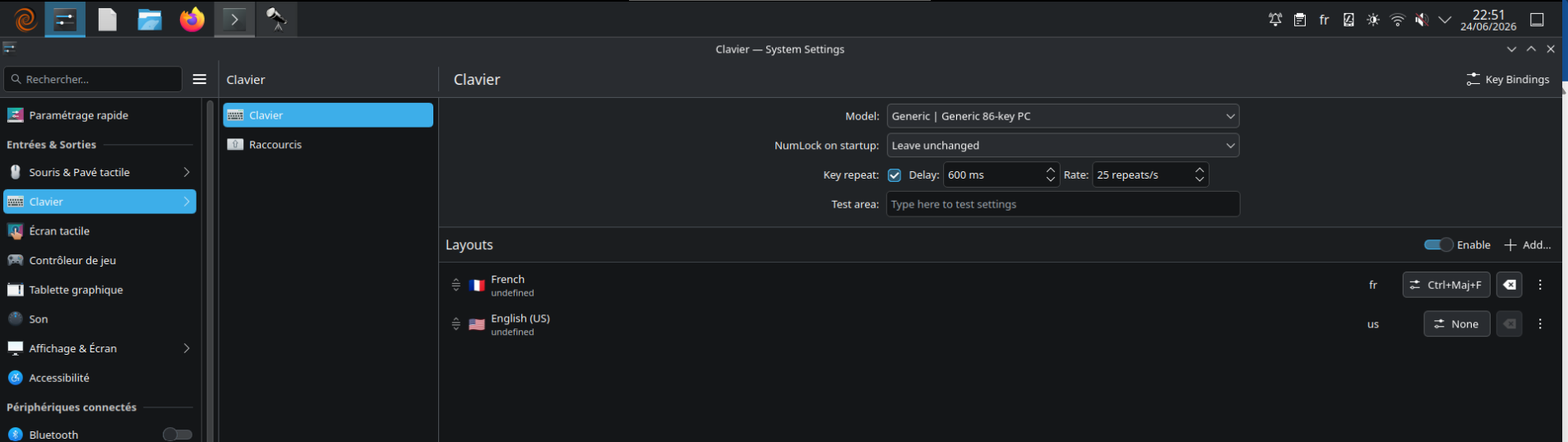
Pour le clavier, j'ai rajouté une ligne dans le fichier .bashrc: setxkbmap fr
-
pour le clavier, une fois connecté en VNC je l'ai configuré ici : Pour les ports ça n'a pas marché... ?

-

ALS - Astro Live Stacker
deufrai a répondu à un sujet de gehelem dans Software de Linux et astronomie
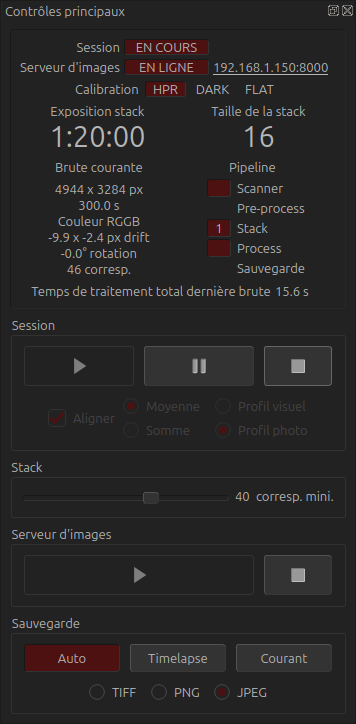
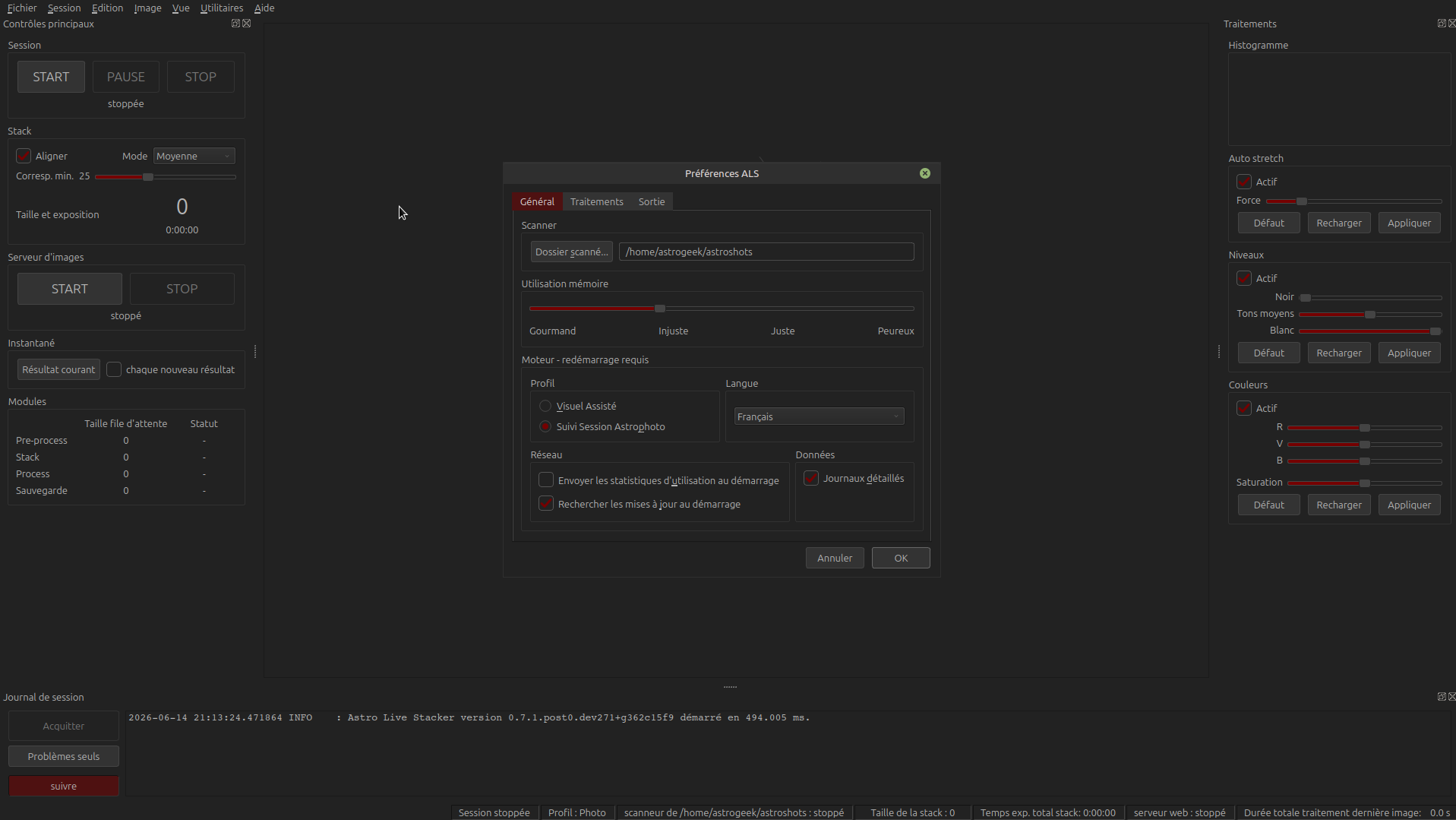
Oyez, Oyez Comme disait l'oncle Sam : "J'ai besoin de vous" Dernière fournée d'amélioration et de corrections. J'arrête de tripatouiller et je ne m'occupe plus que de la doc, qui a pris du sérieux décalage avec les derniers changements : Améliorations Retrait des pixels chauds : réduction de temps de traitement de 75% et prise en compte convenablement des brutes couleurs Changer de profile ne nécessite plus de redémarrer ALS Panneau principal : Nouvel affichage détaillé des infos de session, avec détails sur la brute courante et son alignement Correctifs Changer le chemin du dossier web nécessitait un redémarrage pour prendre effet Il était impossible d'accéder au Bureau sur les systèmes OSX "récents" Le démarrage du serveur d'images bloquait l'interface Je passe pas mal de temps à simuler des sessions avec mes séries de brutes, me mettre dans la peau de l'utilisateur, vraiment. C'est ce qui a amené tous les changements et correctifs des dernières semaines : être facile à utiliser / lire / contrôler. En gardant la qualité en priorité. Les perfs, on le sait, reste un point faible... Mais ALS v2 réglera ça... Dans 4 ans Pour l'heure, si vous voulez bien emmener cette "dernière" version de test de la v1.0 en sortie et me dire... tout ce qui vous passe par la tête, ça m'aidera vraiment à figer les choses avant de refaire les captures d'écran de la doc une 5ème fois, haha Téléchargement version 1.0-dev-946e8898-bld1134: https://als-app.org/nightlies/2026-06-22-946e8898/ La doc, en chantier de la v1.0 : https://preprod.als-app.org/fr/docs/v1.0/ D'avance un grand merci pour le temps que vous pourrez prendre pour qu'ensemble on trouve le dernier bug avant de sortir cette version La bise et bon ciel à tartousses
-
Je reviens à mes soucis de connexion. Je ne réussi à établir une connexion distante qu'en passant par le réseau de la box et en outre ce doit être la seule connexion opérationnelle. Si une connexion wifi est active en même temps, ça ne fonctionne pas ! Avec une connexion par lien ethernet local, j'ai une erreur 21116. Par ailleurs, que faire pour être en AZERTY dans le teminal ?
-
J'essaie ça dès que je rentre du pays Basque 😉
-
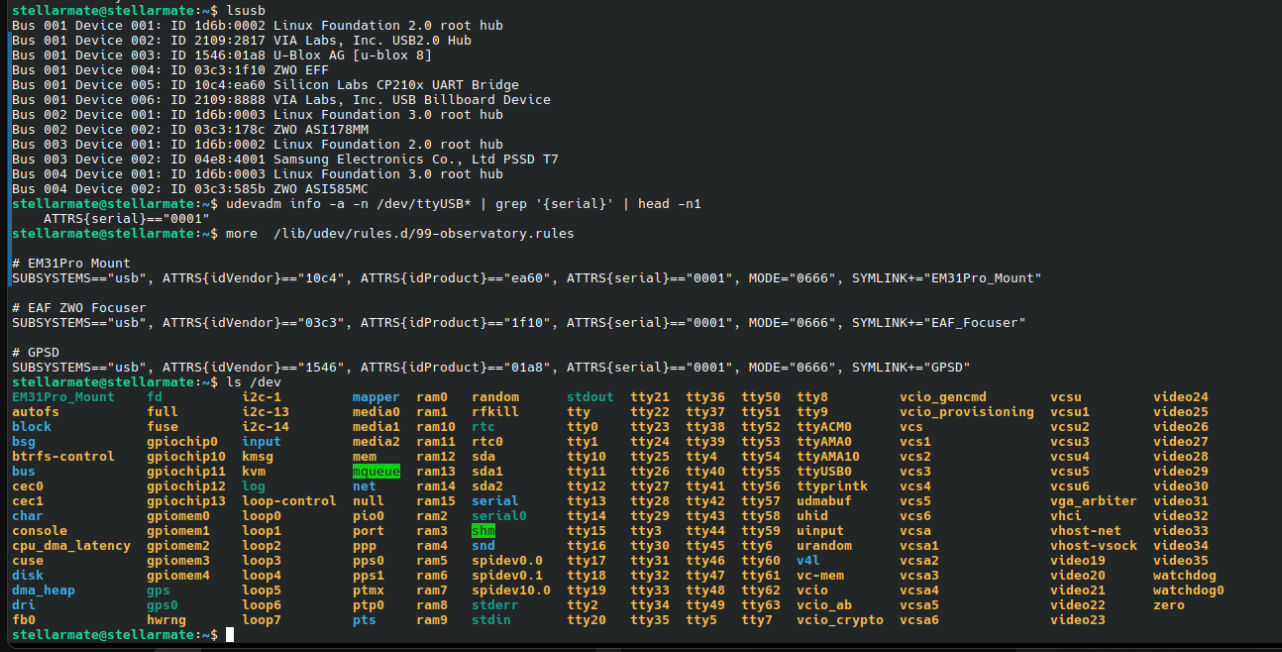
Bonjour, Le champ ATTS(serial) sert à distinguer les devices qui ont le même champ idVendorID:idProduct. Dans ton cas le champ serial est en effet le même pour la monture, l'EAF et le GPS, mais pas les champs idVendor:idProduct (10c4:ea60 , 03c3:1f10 et 1546:01a8 respectivement), il est donc possible de faire un mapping. Pour la monture par exemple, quelque chose de ce genre devrait fonctionner : SUBSYSTEMS=="usb", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", ATTRS{serial}=="0001", MODE="0666", SYMLINK+="EM35Pro" A+
-
Bon les résultats ne sont pas clairs 🙂 j'ai allumé le RPI 5 avec tous les USB débrancés sauf le disque SSD sur lequel je boot... J'ai fait le "lsusb" puis la commande "udevadm info -a -n /dev/ttyUSB0 | grep '{serial}' | head -n1" chaque fois que je branchais un port USB... Pour le disque SSD et les 2 cameras ZWO je n'ai pas de résultats pour la commande udevadm... Je suppose que c'est parce qu'ils n'utilisent pas le tty pour communiquer 🙂 Pour la monture EM31 Pro, l'EAF ZWO et le GPS j'ai le même résultat pour tous... lsusb à la fin : Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 002: ID 2109:2817 VIA Labs, Inc. USB2.0 Hub Bus 001 Device 003: ID 2109:8888 VIA Labs, Inc. USB Billboard Device Bus 001 Device 004: ID 10c4:ea60 Silicon Labs CP210x UART Bridge Bus 001 Device 005: ID 03c3:1f10 ZWO EFF Bus 001 Device 006: ID 1546:01a8 U-Blox AG [u-blox 8] Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub Bus 002 Device 002: ID 03c3:178c ZWO ASI178MM Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 003 Device 002: ID 04e8:4001 Samsung Electronics Co., Ltd PSSD T7 Bus 004 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub Bus 004 Device 002: ID 03c3:585b ZWO ASI585MC EM31Pro : Bus 001 Device 004: ID 10c4:ea60 Silicon Labs CP210x UART Bridge ATTRS{serial}=="0001" ZWO EAF : Bus 001 Device 005: ID 03c3:1f10 ZWO EFF ATTRS{serial}=="0001" GPSD : Bus 001 Device 006: ID 1546:01a8 U-Blox AG [u-blox 8] ATTRS{serial}=="0001" Donc impossible de les mapper...??? J'ai fait la commande " udevadm info -a -n /dev/ttyUSB0 > devices.txt" pour voir si je passais à côyé de qqchose mais je n'y ai trouvé que la monture (?) je mets le fichier en pj... au début j'y ai rajouté le résultat des commandes... Guillaume devices.txt
-
Merci j'essaie ça dès que je peux! 🙂
-
Bonjour, Ce problème de connexion se règle en faisant un mapping persistant des ports USB grâce à udev. La méthode est décrite ici : https://indilib.org/support/tutorials/157-persistent-serial-port-mapping.html Plus aucun souci une fois les règles udev sauvegardées 😉 A+
-
J'ai fait le tst avec un autre hub USB : même résultat... Tout s'arrange si je débranche ces 3 devices et les rebranche... Indi n'a pas l'air d'aimer qu'ils se connectent tous en même temps...
-
Justement le sélecteur de port ne me montre qu'un seul device (l'EM31Pro) et 2 drivers (celui de l'EM31 et celuis du GPSD)...
-
Passes par le connecteur de port en cochant l'option dans ton profil
-
Mon problème réccurrent avec Stellarmate est le démarrage des drivers pour la monture (EM31Pro), l'EAF ZWO et le GPSD... Il s'enmêle les pinceaux dans les ports... je suis obligé après le démarrage de les débrancher tous les 3 puis de les rebrancher pour que tout soit OK... - Je n'ai aucun problèmes avec les 2 cameras ZWO qui sont directement sur le PI5 - ces 3 devices sont sur un petit hub USB... est-ce l'explication??? pourtant cela semble courant...
-
Le 5 Ghz est plus puissant que le 2.4 Ghz mais avec une moindre portée. Pour l'instant je peux me connecter avec VNC par le wifi wlan, le hotspot, la box ou un lien local. Je sèche avec Rustdesk, sans parler de Nomachine.
-
Il me semble que par défaut Stellarmate utilise le 5Ghz ou bien c'est ce qui est conseillé...
-
Bonjour, merci pour ces précisions. Niveau connexion: Mon smartphone se connecte bien avec l'app au SM. Pas ma tablette Android, j'ai bien configuré le 2.4 Ghz pour celle-ci. Pour le confort, je préférerais utiliser la tablette ! Nomachine: que ce soit avec le wifi stellarmate, stellarmate-hotspot, par le réseau box, en lien local direct, "the remote host 'xxx.xxx.xxx.xxx" refused to establish a network connection .... Dans l'autre sens, SM ne peut se connecter à mon PC que comme invité. Rustdesk: ce matin avec le wifi Stellarmate, la connexion se fait ! Alléluia ! Mais il faut que Rustdesk soit lancé sur le SM et il ne l'est pas par défaut. VNC: ça fonctionne aussi.
-
Bonjour, J'ai installé Stelarmatte OS 2.2.1 sur un RPI5/16Go avec un SSD externe 1To en boot, pas de carte SD. Ca fonctionne très bien pour moi. J'ai aussi été surpris que le système soit verrouillé pour les updates et installations mais ça vient de leur volonté de pouvoir avoir la main sur tout le système pour les updates. Néanmoins il est possible de désactiver ça : Pour pouvoir installer des packages : sudo /etc/stellarmate/atomic-updates.sh --disable Pour revenir au système initial : sudo /etc/stellarmate/atomic-updates.sh --enable Je me connecte sans problème depuis mon PC soit en WEB soit avec RealVNC, en hotspot ou sur le wifi de la maison... Mes soucis sont plus dans l'utilisation de Kstars et Ekos... je débute, y'a plein de choses à prendre en main et le workflow de travail est encore nébuleux 😁 Merci à à @rmor51 pour ses documentations! https://www.webastro.net/applications/core/interface/file/attachment.php?id=324411&key=2d11f8e773f6a1e4f1ea1db48561a822 https://www.webastro.net/applications/core/interface/file/attachment.php?id=238121&key=ececc209022a384a8a8bd0b3b8d3d21d Il y en a d'autres mais si j'ai les documents je n'ai pas les liens sous la main... @+ Guillaume
-
Bonjour, J'ai installé Stelarmatte OS 2.2.1 sur deux système. Un RPI5 et un miniPC Quelques soucis pour installé sur le RPI5 car avec un NVMe et non pas une SD Carte... Et facile pour le mini PC. Hier soir j'ai vérifié. Je me connecte très bien sur le hotspot (sur le RPI5) et avec un câble ethernet. Par contre, je ne sais pas comment j'avais fait pour me connecter sur mon wifi perso, mais je ne l'ai pas encore remi (ce serait pratique, faut que je retrouve comment faire). Il faudra que j'essaye de me connecter à distance avec le miniPC pour voir. Pas encore testé. ++
-
ALS - Astro Live Stacker
deufrai a répondu à un sujet de gehelem dans Software de Linux et astronomie
Reuh Une nouvelle version de test de la future v1.0 est dispo : 1.0-dev-0cbe0d52-bld1045 Ce qu'elle apporte par rapport à la précédente version de test : Nouveautés Interface sombre unifiée Améliorations Les données d'image FITS stockées dans des extensions Image ou d'image compressée sont maintenant prises en charge Corrections L'arrêt d'une session vide pouvait enregistrer une image finale horodatée Certaines transitions de session étaient loggées de manière incorrect L'alignement progressif pouvait produire des artefacts rectangulaires imbriqués après d'importantes rotations du champ Le profil Visuel assisté pouvait tenter de lire les brutes avant la fin de leur écriture sur le stockage Les brutes de taille nulle pouvaient bloquer indéfiniment le prétraitement Fini de se péter les yeux sur l'écran, fini aussi le mode nuit qui faisait doublon avec le thème sombre. ALS passe sur une interface sombre, avec enfin la même allure sur tous les systèmes. Ca m'a pris un moment, et je n'ai pas 40 ordis sous la main pour tester toutes les combinaisons. Je suis preneurs de vos impressions ou mésaventures, comme toujours. Surtout si vous voulez bien tester cette version sur Windows 11 et confirmer que l'appli à la même tête que sur cette image de référence pris sur un PC sous Linux, ça m'aiderait vraiment. La bise !
-
 jeanlouis42 s’est inscrit au club
jeanlouis42 s’est inscrit au club -
Bonjour, j'ouvre ce fil après avoir installé sur mon Stellarmate Pro, la version 2.2.1. Première surprise, l'OS: Archlinux. Fini Raspian. Mauvaise surprise, les commandes de l'OS sont spécifiques et il faut les apprendre. Deuxième surprise: une interface plus fournie, Troisième surprise: je n'ai pas réussi à me connecter en distanciel, par le hotspot, par le réseau de la box, par un lien local SM-PC. Alors que le ping de l'adresse du SM est correct. Avec Nomachine, Rustdesk ou VNC ! Sinon, on retrouve KSTARS V3.8.2 et PHD2. Comme je n'utilise pas l'app Android, je pense que je vais m'installer une Debian avec ma config.
-
ALS - Astro Live Stacker
deufrai a répondu à un sujet de gehelem dans Software de Linux et astronomie
Hello Nouvelle version de test d'ALS v1.0 disponible Version : 1.0-dev-1409d0c5-bld907 Nouveautés depuis la v0.7.1 : Thème sombre Ajustement de la saturation des couleurs Calibration par flat Suppression des traînées par "sigma clipping" avec le profil Photo Vérification optionnelle au démarrage d'une nouvelle version d'ALS disponible Correction de la détection de la langue du système sous macOS Téléchargement : https://als-app.org/nightlies/2026-06-10-1409d0c5/ Documentation (WIP): https://preprod.als-app.org/fr/docs/v1.0/ Cette version de développement est destinée aux tests. Merci de signaler tout problème en précisant votre système d'exploitation et en joignant un journal ALS produit avec l'option Journaux détaillés activée. Je la teste depuis un bon moment. Cette version devrait même faire bon office sur vos sorties A tout' et bon ciel tartouss -

Kstars 3.8.3 et stellarmate 3.0.0
LoloCo a répondu à un sujet de LoloCo dans Software de Linux et astronomie
@rmor51 Je ne peux répondre favorablement à ta requette. Mais en tout cas un grand merci pour ce que tu as déjà fait.