Toute l’activité
- Dernière heure
-
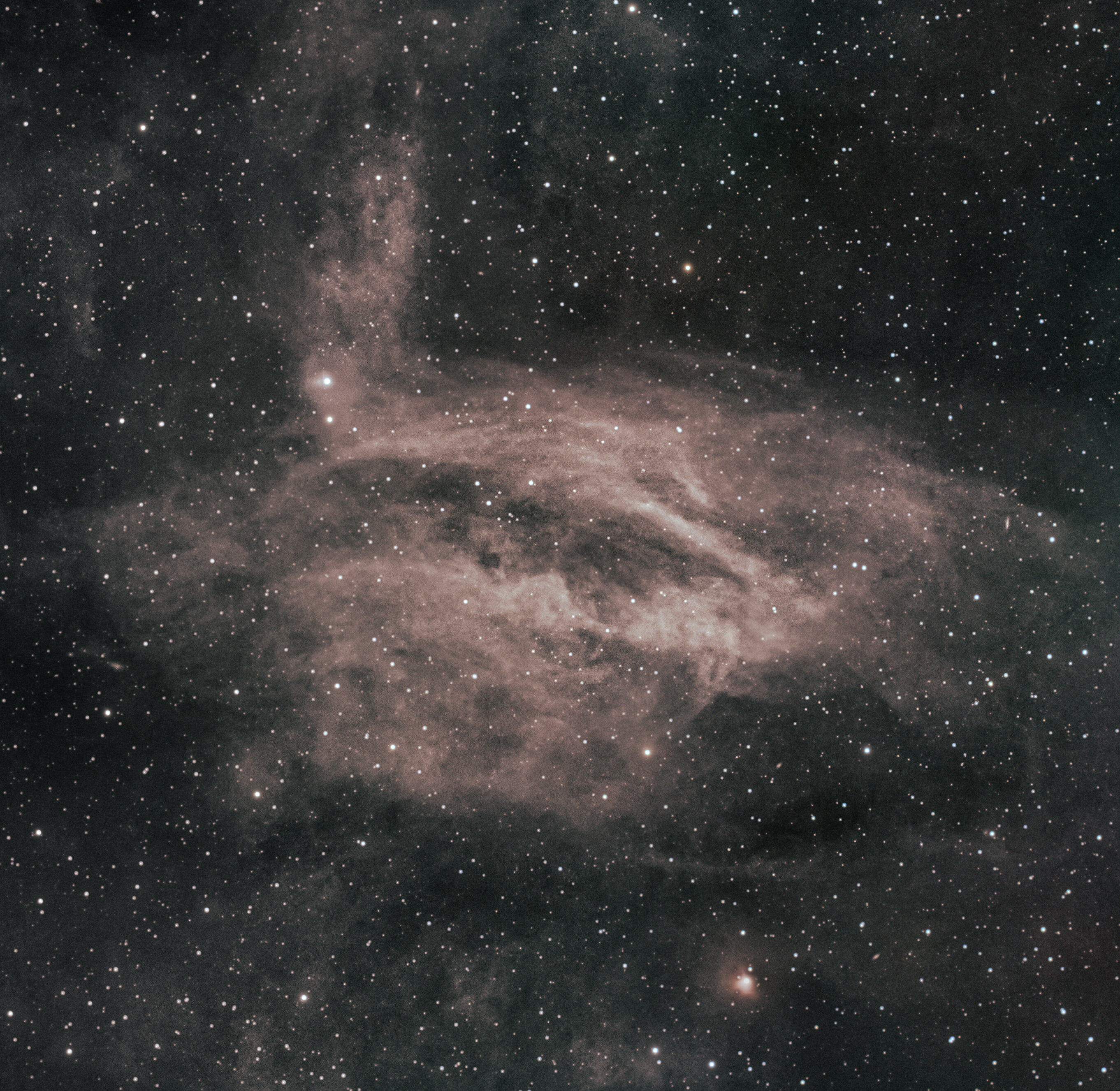
le fit est ici : (le joli halo rouge sur un coté est un éclairage ou autre qui s'est invité à la fête à un moment, mais visiblement ca part bien au retrait de gradient.)
-

Néb diff 🔭 LDN 1158 " Les filaments sombres de Céphée " [TS ONTC 200/800] [Shoot #23]
Celebrinnar a répondu à un sujet de Bross84 dans Astrophotographie
Très belle image !! -
ic4592 LRVB à la fs60 et atik460ex
Celebrinnar a répondu à un sujet de stef41 dans Astrophotographie
Belle prise !! -
Très belles dentelles !! Bien joué !
-

souci grand anneau visible images newton asi294
180Vision a répondu à un sujet de nebujul dans Astrophotographie
J'ai eu le même genre de souci avec une caméra Sedna et le DO Zwo...du jeu avec fuite...grrrr... -
Ce sont des "Philips" selon moi sur le C8, pas des 6 pans. Je vais voir ça en effet, de toute façon suis pas à un essai prêt 🤣
-
Joli tir Stéphane !
-
@gadac, je fignolle du coup, je baisse la luminosité avec un masque sous lightroom sur les zones les plus claires avec l'app qui contrôle en direct la couleur le passage de gris à orange/marron/jaune. Je remarque que le passage en jpeg ajoute un peu de bruit

-
Bon les résultats ne sont pas clairs 🙂 j'ai allumé le RPI 5 avec tous les USB débrancés sauf le disque SSD sur lequel je boot... J'ai fait le "lsusb" puis la commande "udevadm info -a -n /dev/ttyUSB0 | grep '{serial}' | head -n1" chaque fois que je branchais un port USB... Pour le disque SSD et les 2 cameras ZWO je n'ai pas de résultats pour la commande udevadm... Je suppose que c'est parce qu'ils n'utilisent pas le tty pour communiquer 🙂 Pour la monture EM31 Pro, l'EAF ZWO et le GPS j'ai le même résultat pour tous... lsusb à la fin : Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 002: ID 2109:2817 VIA Labs, Inc. USB2.0 Hub Bus 001 Device 003: ID 2109:8888 VIA Labs, Inc. USB Billboard Device Bus 001 Device 004: ID 10c4:ea60 Silicon Labs CP210x UART Bridge Bus 001 Device 005: ID 03c3:1f10 ZWO EFF Bus 001 Device 006: ID 1546:01a8 U-Blox AG [u-blox 8] Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub Bus 002 Device 002: ID 03c3:178c ZWO ASI178MM Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 003 Device 002: ID 04e8:4001 Samsung Electronics Co., Ltd PSSD T7 Bus 004 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub Bus 004 Device 002: ID 03c3:585b ZWO ASI585MC EM31Pro : Bus 001 Device 004: ID 10c4:ea60 Silicon Labs CP210x UART Bridge ATTRS{serial}=="0001" ZWO EAF : Bus 001 Device 005: ID 03c3:1f10 ZWO EFF ATTRS{serial}=="0001" GPSD : Bus 001 Device 006: ID 1546:01a8 U-Blox AG [u-blox 8] ATTRS{serial}=="0001" Donc impossible de les mapper...??? J'ai fait la commande " udevadm info -a -n /dev/ttyUSB0 > devices.txt" pour voir si je passais à côyé de qqchose mais je n'y ai trouvé que la monture (?) je mets le fichier en pj... au début j'y ai rajouté le résultat des commandes... Guillaume devices.txt
- Aujourd’hui
-
Aide choix matériel. Monture VS Dobson
Pinpoche a répondu à un sujet de Pinpoche dans Support débutants
k je m'y collerai dès que j'ai un peu de temps 🙂 -
Bonjour, je profite de ce post pour te demander @stef41 que penses-tu de ta monture ragdoll 17 Pro ? Aujourd'hui avec barre de contrepoids, prolongateur de trépied, trépied et version hub elle sort à un peu plus de 1700 € soit 2000 $. Vu ta photo elle semble bien faire son boulot, pas de soucis particulier, tu l'as reçu aussi sans problème ? Merci de ton retour sur cette monture, difficile de trouver des expériences.
-
Julien,🙂 Les Bob's knobs sont à éviter car ils ne permettent pas la finesse de réglage (et ça se joue au pouilleme) que permettent les 6 pans. Pour le tilt vu la longueur focale,t'en occupé pas. A+ Serge
-
Aide choix matériel. Monture VS Dobson
22Ney44 a répondu à un sujet de Pinpoche dans Support débutants
@Pinpoche, Lorsque vous ouvrirez le bloc moteur et que vous décapoterez le réducteur, vous constaterez que les engrenages tournent "à sec". Enduisez les d'une couche de graisse savonnée lithium et chargée à quelques pourcents de graphite, vous constaterez alors une baisse significative du bruit des réducteurs. Ney -
Aide choix matériel. Monture VS Dobson
Pinpoche a répondu à un sujet de Pinpoche dans Support débutants
Hmmm je n'ai pas de bruit de roulement, mais en vitesse 9 (vitesse à laquelle se fait le pointage), on entend bien le moteur dans un environnement bien calme. A partir de V6, quasiment plus aucun bruit venant du moteur. -
Aide choix matériel. Monture VS Dobson
22Ney44 a répondu à un sujet de Pinpoche dans Support débutants
Bonjour @Pinpoche, Une fois que vous aurez, après démontage complet de votre monture, nettoyé et regraissé tous les mécanismes, vous vous rendrez compte que votre monture est devenue bien plus silencieuse. Pour une vitesse de 5 et moins sélectionnée sur la raquette, à trois mètres de l'instrument on n'entend plus rien. Quant au pointage à vitesse réduite, je vais faire des tests ce jour, je ne m'y étais pas intéressé jusqu'à présent. Ney -

Sujet astro mais polémique n°1 - le soi-disant visuel assisté
joker0247 a répondu à un sujet de 'Bruno dans On fait une pause
Effectivement. Mais en soit le terme d'accumulation est pratiquement implicite dans cette discipline. Qui pratique l'imagerie astronomique aujourd'hui sans empiler plusieurs poses ? -

Sujet astro mais polémique n°1 - le soi-disant visuel assisté
Axeldark a répondu à un sujet de 'Bruno dans On fait une pause
Plutôt en accord avec ton terme même si on il perds la notion d'accumulation des images. Une traduction plus littéral serait "Accumulation d'images en temps réel". C'est moins sexy du coup. Ce débat sur le terme "visuel assisté" me rappelle le débat avec le terme "jeu vidéo" qui pour certains, en la faisant simple, regroupe sous le même mot des expériences narratives et des jeux sans histoire. L'usage tellement courant du terme a clôturé ce débat depuis au moins 10 ans. -
Oui, en fait, je pense que je vais déjà faire une collimation pil poil defocus + tri-bathinov avec mes vis Bob. Le tilt, je vais pas insister à mon avis, le risque étant de faire pire qu'avant car tout est vissé déjà... Pour le BF, j'ai pourtant respecter les distance mais comme d'hab, c'est jamais vraiment ça hein...faut toujours une rondelle ici ou là... Sur la 130, j'ai vécu plusieurs mois sans comprendre avec un pb de BF (qui au final ne se voit plus en effet avec BX)...pour m'apercevoir que j'avais une bague de 2mm laissée sur la caméra mais pas d'origine...lol....
-
Sujet astro mais polémique n°1 - le soi-disant visuel assisté
joker0247 a répondu à un sujet de 'Bruno dans On fait une pause
Bonjour, je suis d'accord avec Bruno. Est-ce qu'un terme tel que "Imagerie en Temps Réel" (ITR) pourrait convenir et être une bonne traduction du "live stacking" déjà bien utilisé par les anglo-saxons.? -
Je toucherai plus à rien si j'avais ça avec mon C9XLT, un coup de BXT et pan
-
Oui ça passe au Dob comme ça. Tu peux partager ton fit oui, pas de soucis.
-
Oui il y a eu des progrès dans leur communication. Pour la première de Ariane 6, je me souviens que l'on devait se contenter de télémétrie et d'images synthétiques dès l'arrivée en haute altitude. SpaceX a l'avantage d'avoir sa constellation de Starlink pour diffuser des images en haute définition. C'est peut-être bête, mais la communication et les belles images, ça permet d'avoir davantage de visibilité et d'inciter les potentiels clients à se tourner vers l'ESA et Ariane 6 qui a des avantages par rapport aux fusées SpaceX. Si Ariane 6 est comparable à une Flacon 9 en terme de charge utile à envoyer en orbite basse, elle permet d'envoyer une charge utile plus importante sur des trajectoires plus élevées (tout de même moins qu'un Falcon Heavy mais pour moins cher.) Ariane 6 (ou 5 avant elle) a aussi un net avantage en terme de volume de charge utile, en particulier pour des satellites avec des dimensions importantes (comme le JWST qui n'aurait pas pu être envoyé par une Flacon.) Et puis, avantage certain de nos jours, cela permet une indépendance totale vis-à-vis des USA et des compagnies privées non européennes.
-

Setup II loading.... (M92 test)
sebseacteam a répondu à un sujet de 180Vision dans Astrophotographie
Tu dois avoir un peu de tilt ( côté gauche de l'image) et peut-être un manque de backfocus, je rajouterai qq mm de tirage pour voir (étoiles étirées dans le sens des 4 coins). -
Salut @sebseacteam / Seb, Tiens, comme demandé, le stack sans traitement (enfin si, le gradient quand même), STF-> Histo-> jpeg On voit bien que dans les coins c'est pas nickel oui... Et que la MAP est pas parfaite, tout comme la collimation...
-
Oui, le désespoir du nouveau setup...c'est ça ! Quoique, même sur un setup rodé, un jour ou l'autre...tu passes par la case dépit...pour x raison soudaine Merci ! Oui, avant, je faisais pareil, PC sur le pillier par exemple... Mais maintenant, je mets tout au dessus, sans trop déséquilibrer...le revers c'est que ça alourdit le setup, c'est certain... Merci...espérons que je ne doive pas trop m'en remettre à la chance justement lol Oui oui, c'est déjà ce que j'ai fait avec la SQA55 et le Z6 l'année dernière. Une fois rodé, ça marche. Mon setup principale avec la 130, lui est sur le pillier donc déjà, le pb est réglé quasi (sauf si ennui). Celui là, il est coté Sud et si je le bouge pas en faisant des cibles (en nombre plus réduit car pas mal d'obstacles, dont la maison au Nord ), et que réglé, ça ira aussi normalement. Le pb du mois de Juin c'est nuits courtes + travail + chaleur...pas idéal pour faire une mise en place de nouveau setup..mais on va faire avec, tranquillement




Annonces
-
Actualités
-
 Par Ca se passe la haut
Par Ca se passe la haut
-

-
-
-
Mes clubs
-

Linux et astronomie
Club ouvert · 385 membres
-

L'astronomie vintage !
Club ouvert · 338 membres
-

Siril et Sirilic
Club ouvert · 387 membres
-

Paysages de Nuit
Club ouvert · 236 membres
-

Astronomie profonde.
Club ouvert · 22 membres
-