Classement



Contenu populaire
Affichage du contenu avec la meilleure réputation le 06/06/25 dans toutes les zones
-
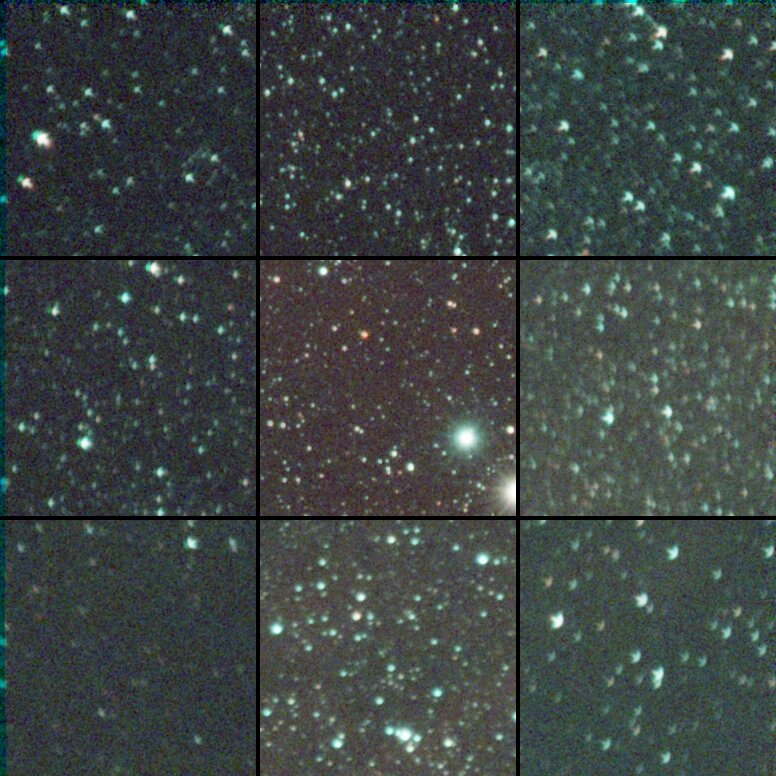
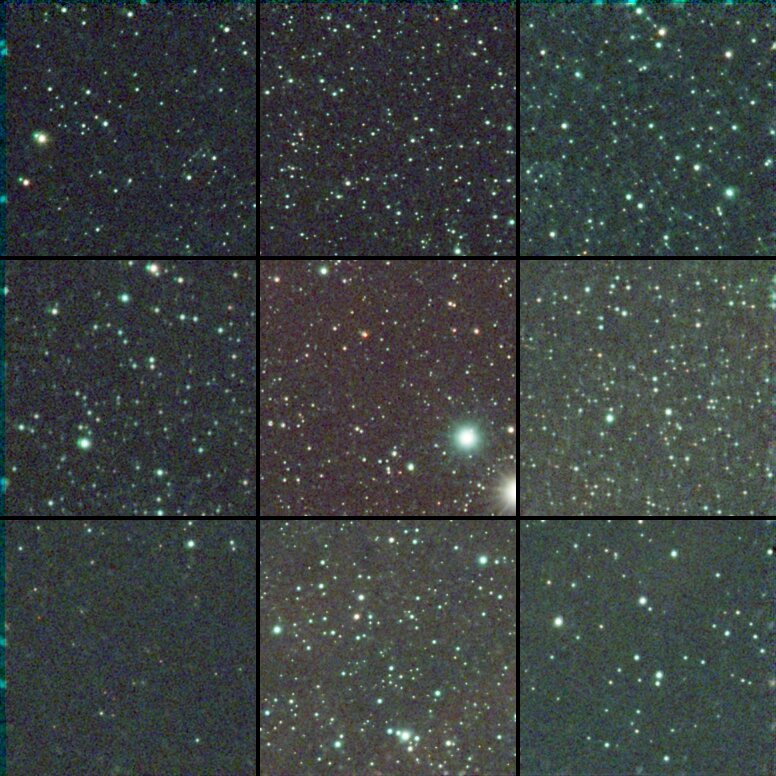
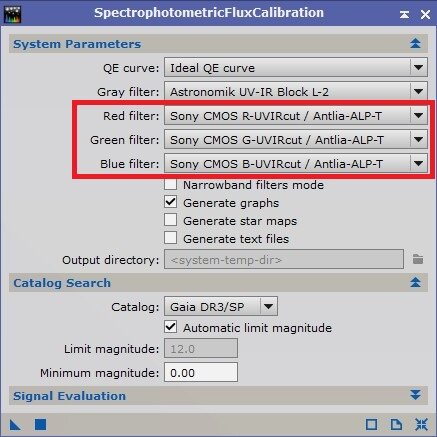
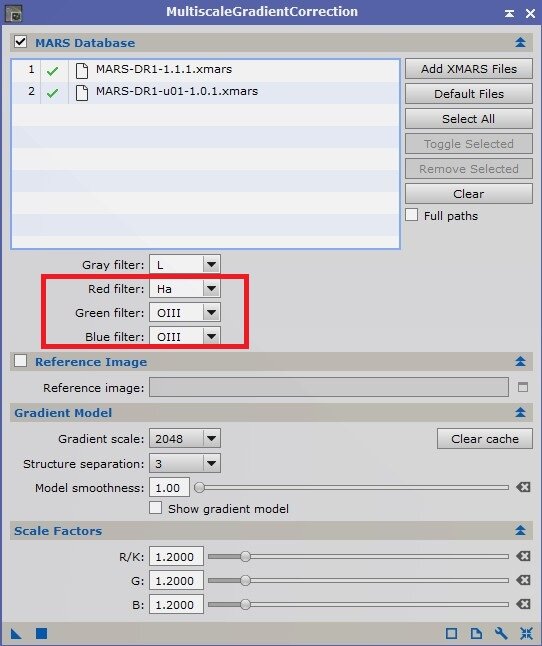
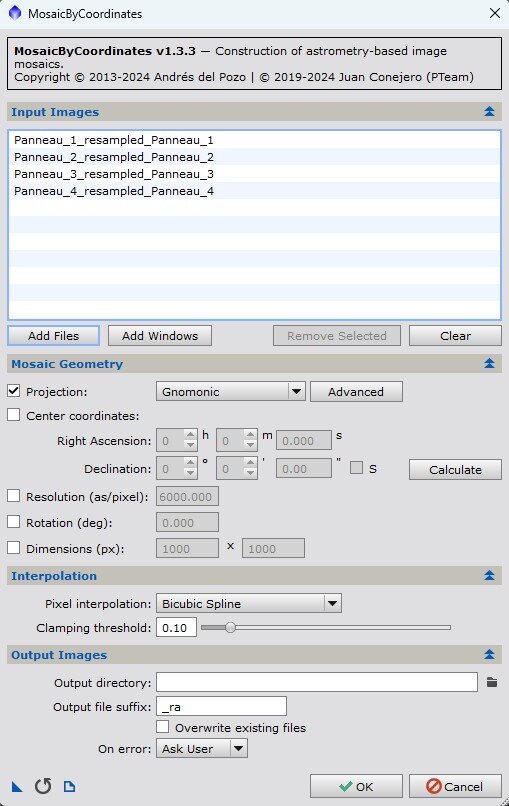
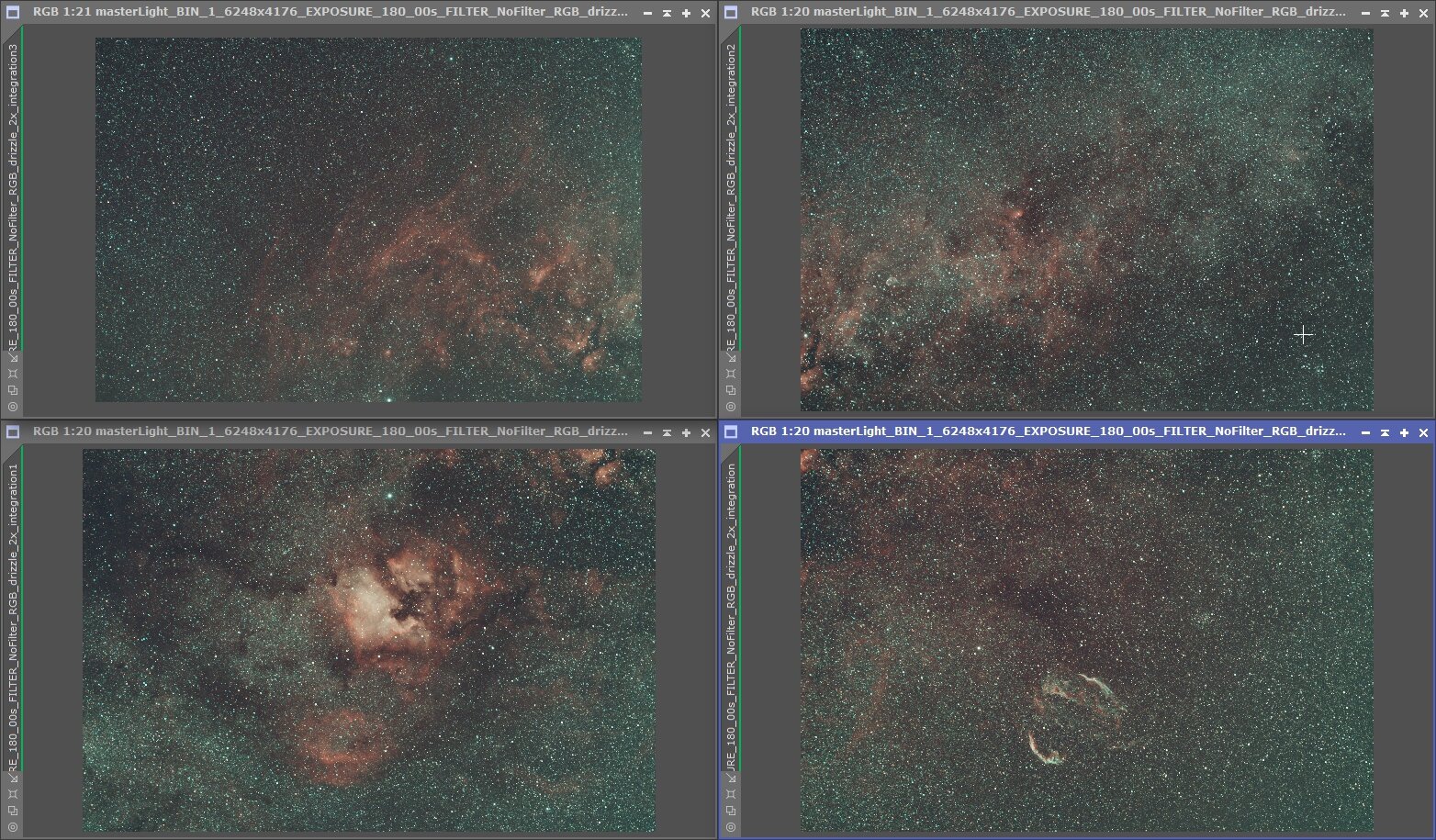
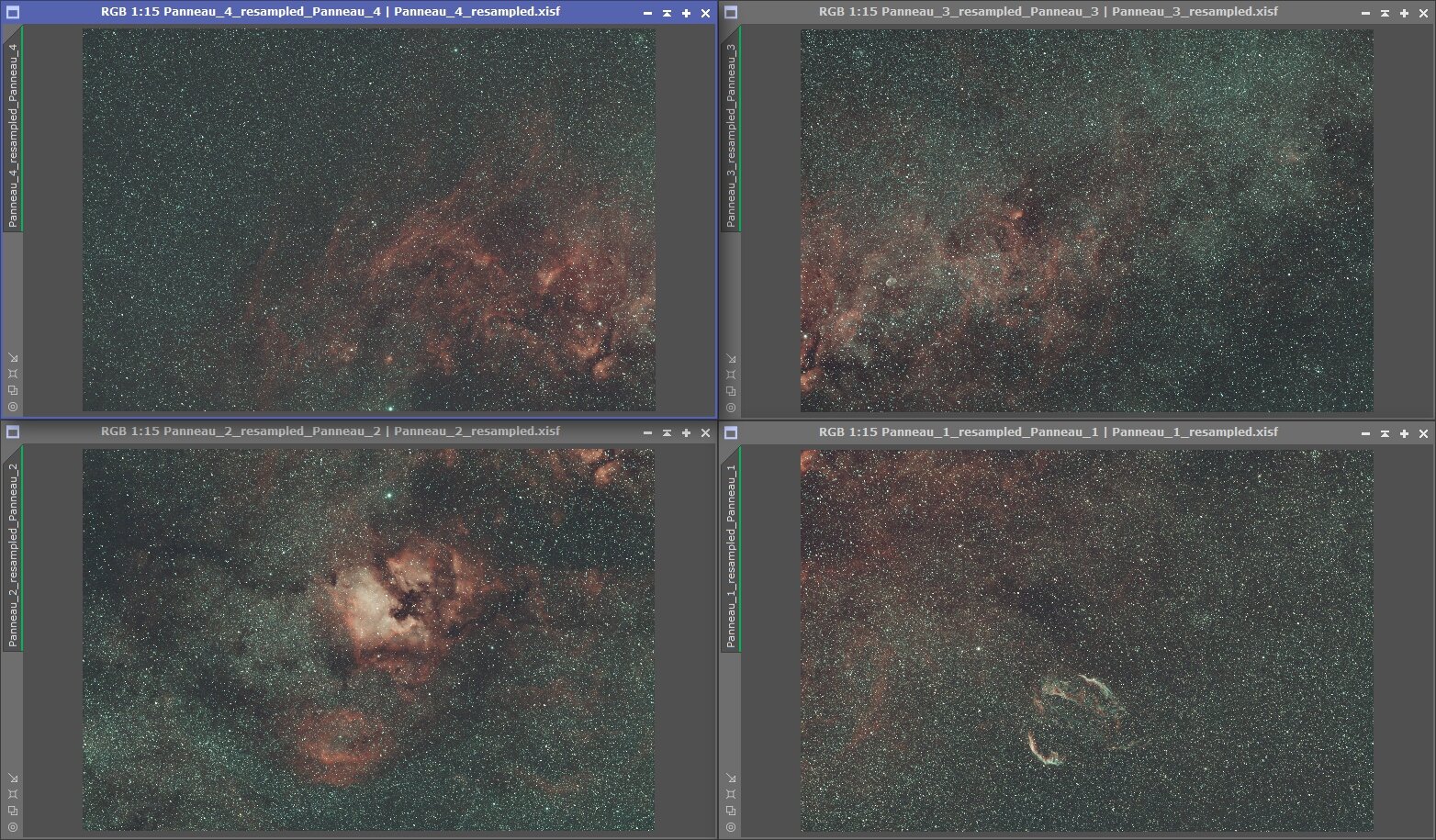
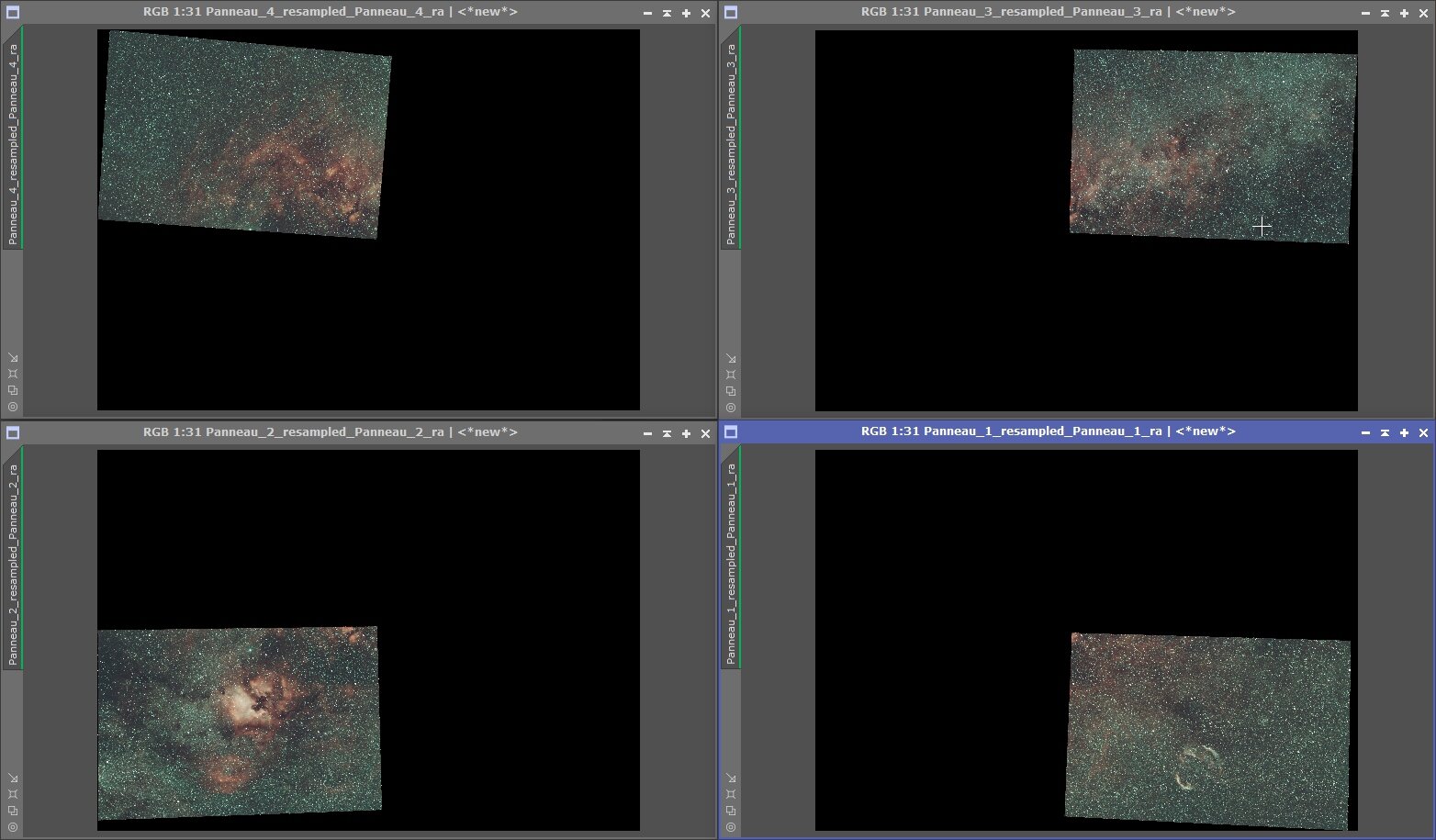
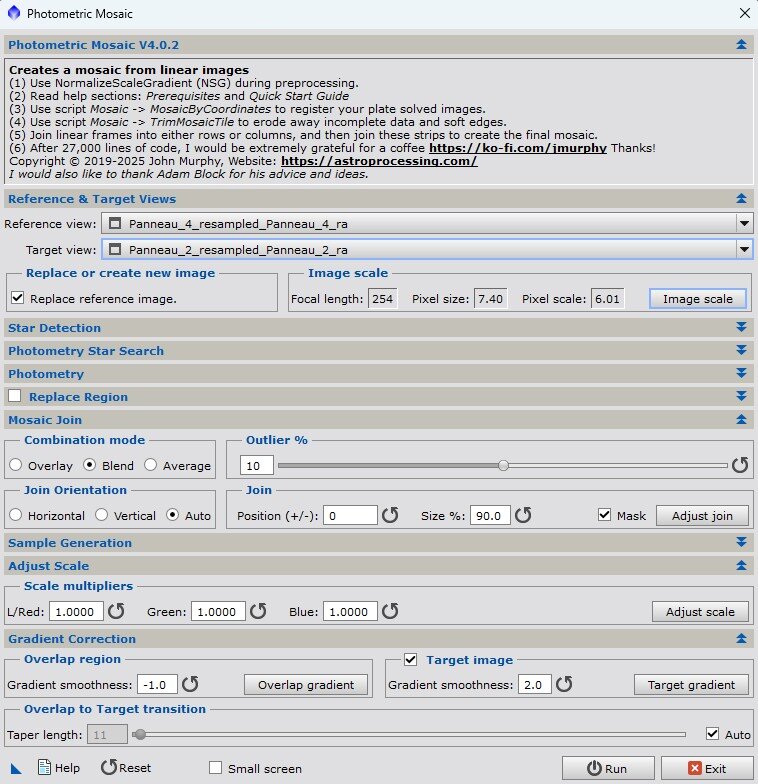
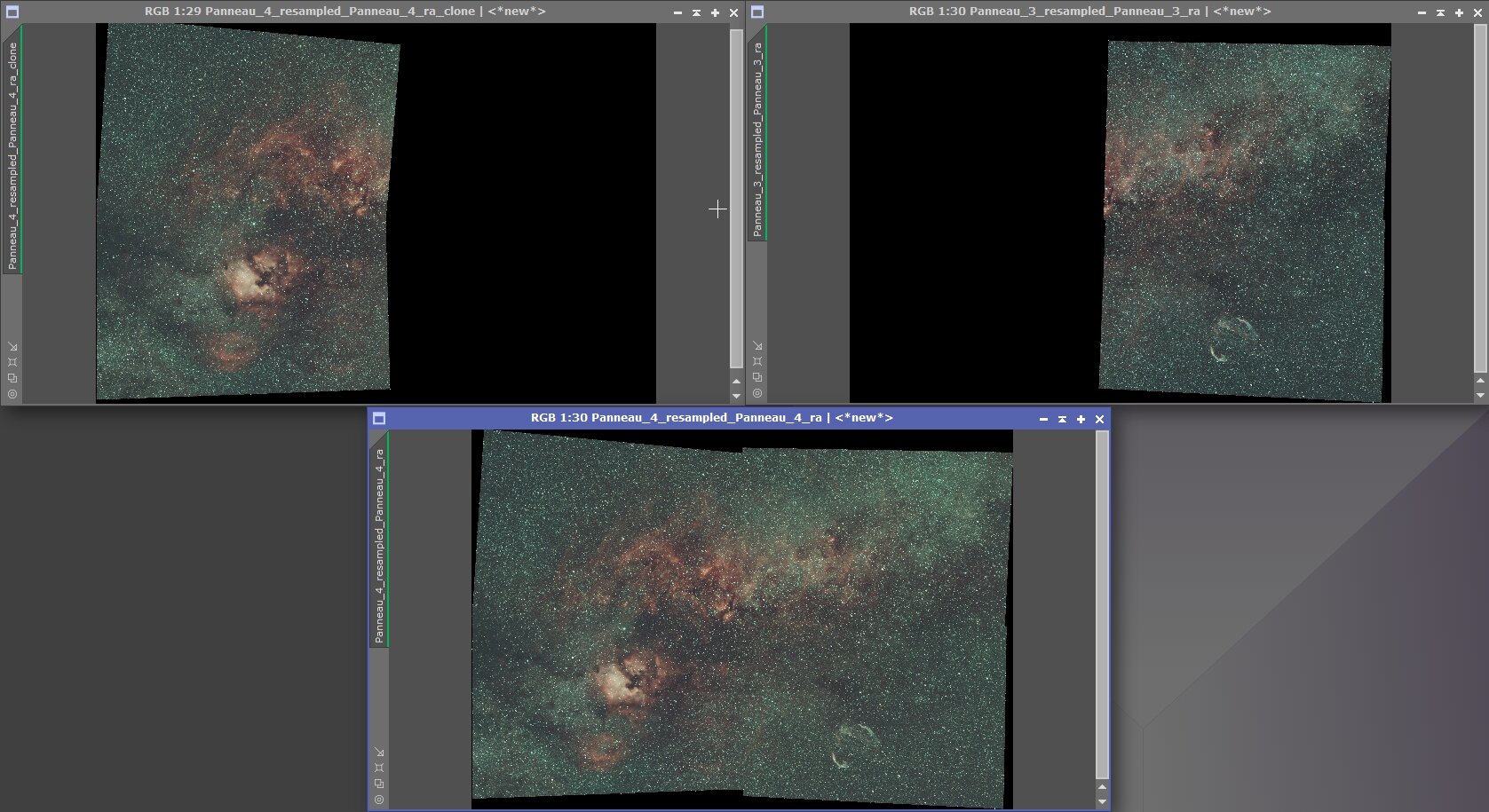
Bonjour à tous, J'ai retraité récemment une mosaïque de la région du Cygne que j'avais shooté en 2023. Grace à certains des nouveaux outils de Pixinsight, le traitement a été largement facilité et je me suis dit que je pouvais faire un post sur la façon dont j'avais procédé histoire de partager les techniques. J'évoquerais ici uniquement la réalisation de la mosaïque elle même, jusqu'à la jointure finale. Et je ne parlerais pas du traitement qui vient après. En gros, la mosaïque repose sur 3 étapes: la préparation des panneaux (notamment la correction de leurs gradients) l'alignement des panneaux sur la géométrie finale grâce à MosaicbyCoordinates La jointure des panneaux grâce au Script PhotometricMosaic. A noter que ce dernier script n'est pas un script de base de Pixinsight. Il faut ajouter un "repository" pour pouvoir en bénéficier (https://www.astroprocessing.com/repository.html) Présentation des images: Il y a 4 panneaux de la région du Cygne shooté avec ma caméra ASI2600MC, un objectif Tamron de 85mm et un filtre duo-band (Ha-OIII) Antlia APL-T. Les panneaux ont été prétraités avec du drizzle x2. Voici ce que donne les 4 panneaux brutes en sorties de prétraitement: Préparation des Panneaux Correction des étoiles Malheureusement, à l'époque de l'acquisition, j'avais encore des problème de réglage de backfocus et de rigidité du montage entre la caméra et l'objectif. Du coup, les étoiles dans les coins des panneaux sont très mauvaises: C'est un problème pour les mosaïques car cela va provoquer des artefacts au niveaux des jointures et il faut donc essayer de corriger ça. La première chose que j'ai fait est de séparer les canaux (avec le process ChannelExtraction) puis de les réaligner (avec le process StarAlignment) en prenant le canal vert comme référence et en activant la prise en compte de la distorsion et enfin de recombiner les canaux (avec le process ChannelCombination). Cette opération permet de limiter les décalages chromatiques (visibles notamment dans le coin en haut à gauche) de l'image d'origine. Et puis application de Blurx en mode "correct only": Le résultat n'est pas parfait et ça ne remplace pas une acquisition plus soignée mais on évite ainsi un certain nombre de problèmes au moment de la jointure des panneaux. Après avoir réalisé ces opérations il est bien de refaire une résolution astrométrique des panneaux pour avoir la solution la meilleure possible pour les étapes d'après. Correction des gradients L'étape suivante est la correction du gradient. Avec les outils de retrait traditionnels (comme DynamicBackgroundExtraction), j'avais toujours des problèmes pour les mosaïques. Même si le gradient était visuellement parfaitement corrigé sur les panneaux individuels, le retrait était fait de telle manière que les panneaux n'était plus vraiment "compatibles" entre eux et cela donnait alors des transitions visibles au final. Grace au nouvel outil de correction du gradient de Pix: MultiscaleGradientCorrection (MGC) qui se base sur l'approche décrite ici (https://pixinsight.com/tutorials/multiscale-gradient-correction/ ) on a un outil qui permet un retrait objectif des gradients et donc des panneaux qui se joignent parfaitement après le retrait. Par contre, comme il s'agit d'une image narrowband, il faut faire un peu attention pour utiliser MGC correctement. Le préalable est d'utiliser l'outil SPFC qui va permettre de calibrer les flux de l'image avec les réglages correspondant au filtre utilisé (ici le Antlia-ALP-T): Une fois ce préalable fait on peut alors appliquer MGC avec les réglages suivants: Après avoir réalisé ces opérations sur les 4 panneaux, on a désormais le résultat suivant: Resample Afin de limiter les temps de calculs des opérations suivante et pour avoir une géométrie finale de taille raisonnable j'ai choisit de resampler les panneaux individuels à 75% en utilisant le Process Resample de Pix. Avec des images sous-échantilloné comme celles-ci, il faut faire attention à l'algorithme utilisé car ils vont avoir un impact important sur l'aspect final des étoiles et il peuvent provoquer des artefacts sur ces dernières. Ici j'ai choisi l'algorithme "Bicubic-Spline" avec une réglage de "Clamping Threshold" à 0,1. A noter que le resample va supprimer la solution astrométrique des images et qu'il faut donc la recalculer avec ImageSolver pour chaque panneaux. Alignement des Panneaux L'alignement des panneaux sur la géométrie de la mosaïque est réalisé avec le script MosaicbyCoordinates. En lui passant en entrée les 4 panneaux, celui ci va déterminer automatiquement les caractéristiques de la géométrie finale et va aligner les 4 panneaux sur celle-ci. Comme avec le resample, il faut faire attention à l'algorithme d'interpolation utilisé. Voici un exemple de la différence entre l'algorithme Bicubic Spline et les réglages par défaut de MosaicbyCoordinates Une fois le script terminé, on obtient les 4 images suivantes: Jointure des Panneaux Il reste alors à joindre les panneaux avec le script PhotometricMosaic. Je ne suis pas sûr que ce soit absolument nécessaire mais l'auteur du script PhotometricMosaic recommande de supprimer quelques pixels en bordure des images avant de les joindre. Il propose un script dédié à ça: TrimMosaicTile (qui vient dans le même repository que PhotometricMosaic). J'ai donc enlevé 5 pixels de chaque coté des 4 panneaux. Le script PhotometricMosaic lui même est assez complexe ( il est par contre très bien documenté) mais Il est à mon sens largement préférable au vieux script natif de Pix: GradientMerge mosaic. Le principe est qu'il utilise la photométrie des étoiles pour mettre les panneaux à l'échelle et pour gérer les zones de transition. Cela donne en général d’excellents résultats. Son seul point faible est qu'il ne peut joindre des panneaux que 2 à 2. Il faut donc procéder par étapes et cela peut devenir laborieux quand on a beaucoup de panneaux dans sa mosaïque... Ici, grâce aux traitements préalables des panneaux, j'ai utilisé tous les réglages par défaut du script, excepté le mode de combinaison réglé sur "Blend" et le réglage "Outlier" réglé sur 10: Ensuite j'ai donc procédé par étape en joignant les 2 panneaux de gauche puis les deux panneau de droite et enfin en joignant les 2 résultats précédant: Il reste alors à croper l'image et à la résoudre astronomiquement une dernière fois. Le travail spécifique de la mosaïque est alors terminé et il ne reste plus qu'à traiter l'image normalement. Je vous met le résultat final de mon traitement. Après les étapes décrites au dessus je n'ai fait aucune opération particulière de traitement des gradients ce qui prouve à mon sens l'efficacité de ce workflow et en particulier la fiabilité des résultats de MGC sur les panneaux individuels. N’hésitez pas si vous avez des questions ou des remarques. Nico
 3 points
3 points -
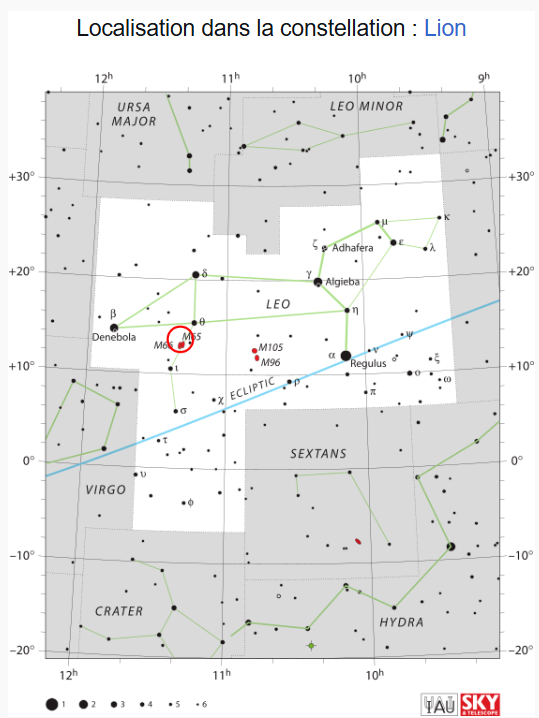
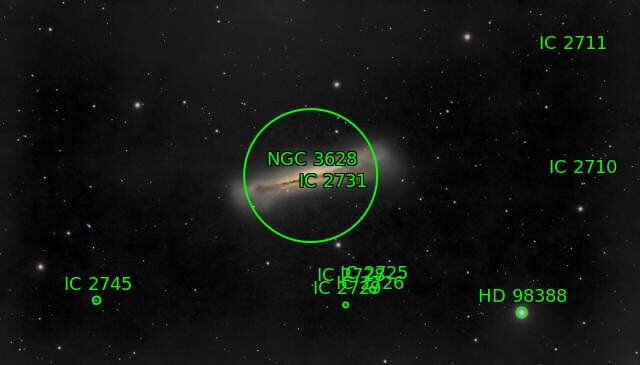
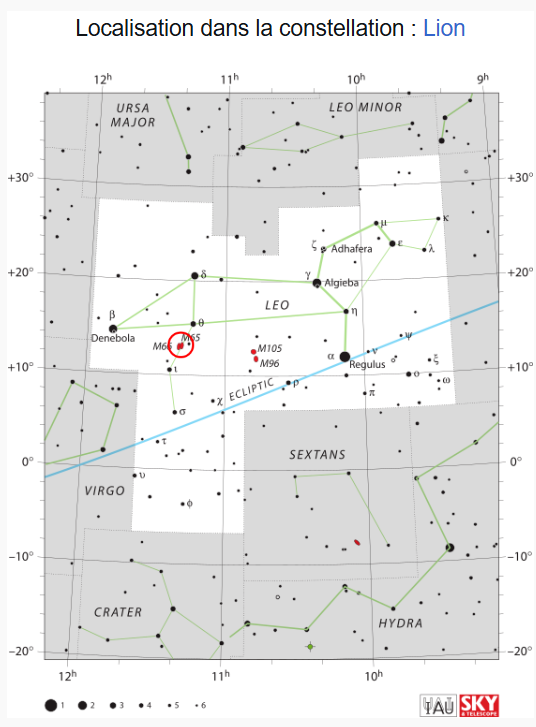
Hello, Si vous avez peur d'avoir une faim subite, je vous conseille de regarder l'image plutôt vers midi, car je vous emmène en balade à McDo? perdu...chez Quick? re perdu....chez BK? encore raté caramba.. Non je vous emmène dans le Lion pour la suite du Trio de galaxies. NGC 3628, aussi appelé la galaxie du Hamburger[6] (en raison de ressemblance avec le célèbre sandwich) est une vaste galaxie spirale vue par la tranche et située dans la constellation du Lion. Elle a été découverte par l'astronome germano-britannique William Herschel en 1784. Lunette Skywatcher 80ED (80/600) + réducteur 0.8x @ 479mm Caméra planétaire Player One Neptune-664c + filtre Player One IRcut Anti-halos Monture HEQ5 kit courroie Rowan Autoguidage via lunette guide 60/270, Asi290mm / PHD2 Acquisition NINA 338 x 30s Gain 180 Traitement Siril, Pixinsight, Photolab 6. une brute de 30s: Bon app'
2 points
-
Bonsoir bonsoir ! Allez, une prise non traitée de mi-mai dernier, à cheval sur deux nuits car nuages en partie malheureusement. Il s'agit de NGC 2146 et sa forme encore particulière ici. Quelques 4h de Luminance avec une fwhm "moyenne" de 2.6" au final. 1h environ de chaque R/G/B prétraitement Siril habituel Traitement pix classique LRGB -Staralign/dynamicCrop/GradientCorrection - ChannelCombination pour RGB puis Solver+SPCC - BlurX sur L et RGB - STF+Histo pour stretch RGB puis StarX+NoiseX sur starless - Léger Curves S + Chrominance - StarX sur L puis EZStretch + NoiseX sur Starless - GHS pour tons moyens - LRGBCombination des starless export PS pour assemblage Starless+stars et ajustements finaux + Starpikes La voici ! (click+zoom)
2 points
-
La bague est en M54x0. 75 Et différence entre PO d'origine (ici avec un tube allonge 2") Et la bague (même tube allonge ) Y'a pas photo ! (enfin si quand même y a photo)
1 point
-
Non je change presque à chaque cible. Le traitement de base est le même oui: Gradient Couleurs SPCC blurX Denise Montée histogramme avec EZsoftstretch La suite change souvent suivant la cible à faire. Chaque galaxie est différente. Mais je pourrais reprendre une V2 oui pourquoi pas 😌1 point
-
Bonjour à tous, Bill24 : pas toujours facile... Comme Elgood ou de nuit, j'éclaire une main par ex, pointe l'assemblage oculaire+smartphone vers ma main, j’essaye d'avoir le cercle oculaire bien centré et bien net, et je tourne la bague de relief (si elle est réglable) de l'oculaire de manière à avoir la luminosité uniforme sur tout le champ. Et je remets délicatement l'ensemble das le porte oculaire. Mes "meilleures" photos rapprochées jusqu'à présent, sans que ça ne soit parfait... au Meade 2080 et Huawei Y6, AstraStack, Gimp et Photo Android Bon ciel !
1 point
-
Faut demander au den.....1 point
-
Bonjour @geo62, une image sur le sombrero pour que tu puisse comparer, avait tu activé la vivid vision ?
1 point
-
Pour moi, le rapport commet, selon moi, est une expérience de pensée justement. Un ministère qui demande un rapport sur les possibilités et les conséquences, si cela était avéré, par exemple. Mais admettons que des extraterrestres nous visitent malgré la distance incroyable entre nos 2 mondes. Même si Ils voyagent à presque la vitesse de la lumière avec la relativité du temps, le temps qu'ils arrivent ici et repartent chez eux, il se peut que leur civilisation n'existe plus. S'ils sont sur terre depuis des millénaires, alors ils fabriquent leur technologie ici avec des ressources terrestres. Si c'est le cas, avec nos technologies actuelles de surveillance militaire et scientifique, on les aurait débusqués j'imagine. Puisqu'ils viennent d'un autre monde, comment peuvent-ils se nourrir ici sans que personne ne s'en rende compte. Il ne faut pas oublier la période de guerre froide et les histoires subversives pour épuiser financièrement l'équipe adverse et détourner les ressources de renseignements sur des histoires bidons. La propagande de guerre est utilisée contre l'ennemi et sa propre population dans les stratégies de guerre. Si c'est classé hautement secret défense, c'est justement pour ça peut-être. Et si c'est ultra secret défense, comment le congrès américain pourrait être autorisé à rendre public le fond de l'histoire ? Et si les extraterrestres sont parmi nous, ce n'est toujours pas le congrès qui pourra marcher sur le système pour faire plaisir à des fans de SF à mon humble avis. J'aime bien ce débat. Et je trouve inutile d'être agressif ou moqueur. Même si je suis sceptique, qui sait vraiment à part les militaires ? Car c'est eux qui font vivre et évoluer toutes ces histoires...1 point
-
Salut à tous, Pour compléter... Enfin pu faire une image avec la lunette Vaonis Vespera. Bien entendu, en imagerie, même un petit diamètre (50/200), le champ est évident et l'objet visible par rapport aux informations données par @yapo dans AS Mag. Le 31/05/25. Vers 1h TU. 60 images en 10mn de pose. Image extraite et zoomée d'un champ 2,1x1,7°. On était sur une moyenne SQM à 21,65 cette nuit là mais avec une humidité très marquée.
1 point
-
Bonjour, Si, il y a un faisceau visible sur certaines des images de la vidéo. En fait, il y en a même deux, qui partent du sol du même endroit. Le deuxième tape le ciel à un endroit où il n'y a pas de nuage. Un montage GIF réalisé avec deux images successives de la vidéo qui est à 29,895 fps :
1 point
-
Depuis déjà pas mal de temps je regardais les différents postes et avis sur les oculaires ayant un champ de 100 …. Mais j’hésitais du fait de la taille et du poids. Les bonnes occasions s’étant présentées grâce à deux membres du forum, j’ai finalement décidé d’essayer un TS XWA 13, un APM HDC 9.et un APM HDC 7. Première impression en ouvrant les boites, ils sont beau 🤩. Ils sont assez grand et lourd, mais sincèrement pas aussi encombrant que ce que j’imaginais. Le poids est similaire au Nagler 20T5 que j’ai et la taille est légèrement supérieure aux oculaires Morpheus, ou même à un Pentax XW ou XL 5. Donc vraiment rien d’effrayant. Malgré les nuits très courtes et relativement lumineuses à cette période de l’année au Danemark, j’ai profité pour fait de rapides essais avec la 80Ed f7 sur des cibles faciles (M13, M92, M57, différentes étoiles carbonées, différents amas ouverts, …). Que dire? Wow, il y a du champ! Et un champ propre. Pas parfait en bord de champ, mais rien de vraiment dérangeant. Le 9mm et 7mm sont excellent avec des étoiles quasiment ponctuelles même en bord de champ. Le 9mm me fait penser au Morpheus 9mm mais avec bien plus de champ. Voir les amas globulaires et M57 est un pur bonheur. Les amas globulaires restent peu définis du fait du diamètre de la 80ED, mais les voir dans le champ géant d’étoiles avoisinantes est magnifique. Même avec un ciel clair, M57 saute aux yeux. Les 9/7 sont quasiment parfocal avec le Nagler 20, par contre la mise au point du 13 nécessite de rentrer le PO d’une dizaine de mm. Niveau confort, personnellement je les trouves excellents et facile d’utilisation, plus facile que le Nagler 20 (avis personnel). Bien évidemment, ce n’est pas un oculaire pour les porteurs de lunettes, le relief d’œil est trop court (ou alors vous voyez que 50% du champ). Par contre, difficile de voir tout le champ sans bouger la tête et les yeux…. Donc, attention pour tout ceux qui souhaitent absolument voir le bord de champ. Un APM 30. UFF est en chemin pour compléter l’ensemble ! Vivement le retour d’un ciel bien noir pour voir ce qu’ils ont vraiment dans le ventre. Je suis curieux de voir en lunaire et planétaire comment ils se comportent. Je ne sais pas si il existe une très grande différence entre ces oculaires et les Ethos, mais pour le prix en occasion, ils me semblent imbattables. Bon ciel à tous.
0 point
-
Bonjour les gens, Avec une monture altazimutale comme celle d'un Dobson, il vaut mieux avoir une référence sol bien horizontale. Jusque là c'était avec une planche d’aggloméré mélaminé calée avec ce qui me tombait sous la main. Il fallait faire mieux. Après un inventaire de toute sorte de matériaux dans les recoins de l'atelier, il m'a juste manqué de la tige filetée de 16 mm de diamètre. Ça a été le seul achat pour ce bricolage, soit moins de 9€ Une image valant mille mots, voici le résultat : Grâce à cette plateforme tripode il est désormais très facile d'obtenir une référence bien horizontale sur laquelle poser le télescope. Pour ma part c'est un Flextube 300P. Les poignées ont été tournées dans des entretoises de palettes jetables, d'où les trous de pointes encore visibles. Le montage bois/bois est en collé néoprène/vissé et porte très facilement les 53 kgp de l'instrument. Le montage bois/métal est collé à l'araldite. Si quelqu'un est intéressé, plus de détails en MP. Bon ciel à tous Ney
0 point
-
Bonjour à tous, Je vous soumet la première lumière de ma FF65 avec un peu de lumière de fin de la 80ED :). C'est également la première fois que je vous soumet une photo. J'ai combiner les deux car j'ai shooté les mêmes objets deux nuits de suite avec deux équipements différents. 5,5 hrs de pose au total en pose de 3 min + DOF. traitement sous pixinsight and Lightroom.
0 point
-
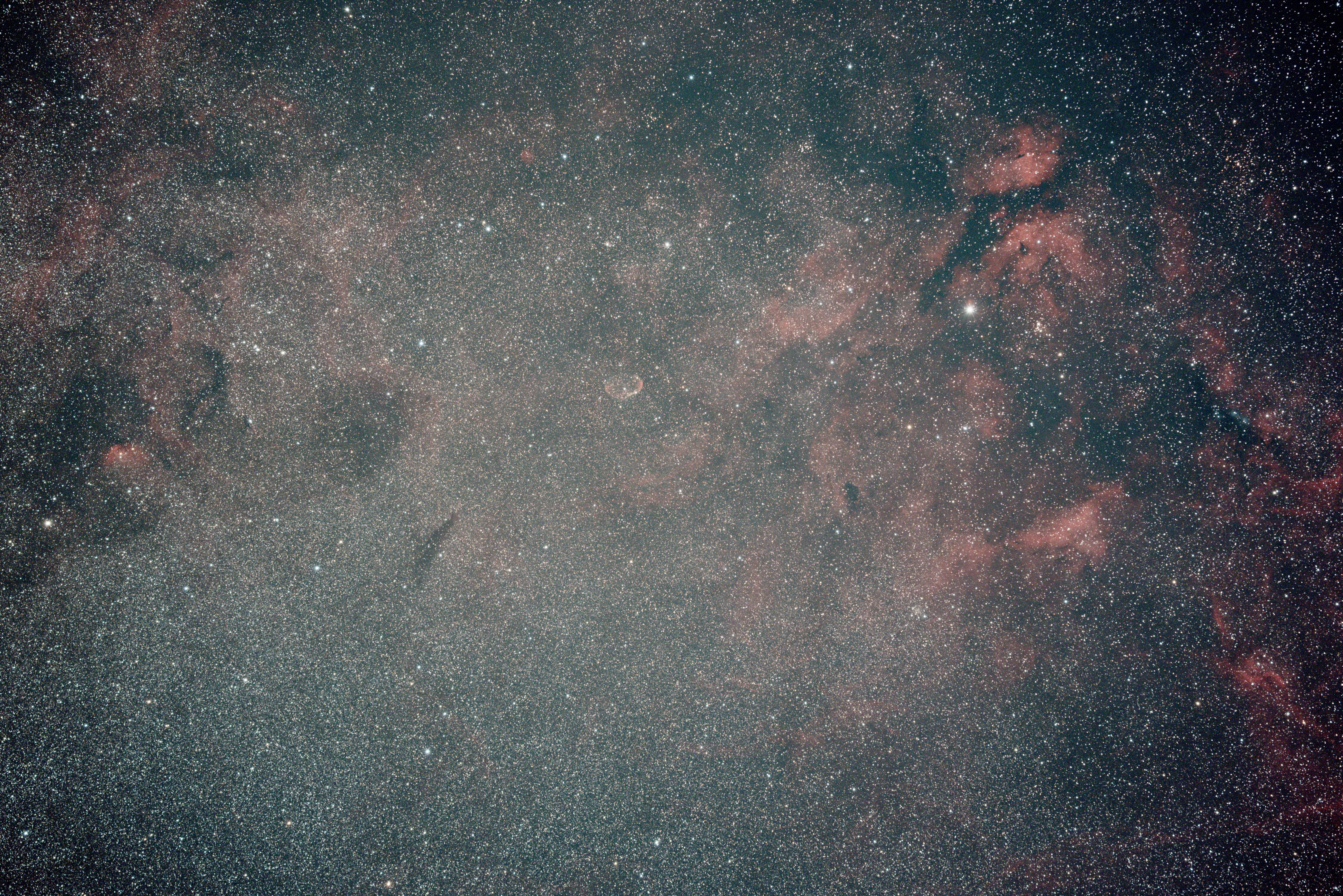
Hello 🙂 Nuits du 28, 29, 30 et 31 mai 2025. Captures démarrées après que la lune soit couchée, ciel dégagé, températures agréables, turbulence légère. Cible: nébuleuse diffuse IC 1396 située dans la constellation de Céphée. Instrument utilisé: Vespera Pro Il s'agit d'une vaste nébuleuse, très faible, ayant nécessité 4 nuits d'acquisitions en mode mosaïque automatique et l'utilisation d'un filtre interférentiel Dual Band. - temps de poses total cumulé: 09 heures réparties sur 4 nuits - 3240 poses unitaires de 10 secondes à 20 dB IC 1396 est une vaste nébuleuse en émission (hydrogène) et aussi une région de formation stellaire. Elle est située à environ 3 000 années-lumière de la Terre dans la constellation de Céphée. Elle a été découverte par l'astronome américain Edward Barnard en 1893. Cette nébuleuse est remarquable par ses dimensions apparentes généreuses dans le ciel (2.8° x 2.3°, comparable à quatre fois les dimensions de la pleine lune). Sa taille réelle dans l'espace est au moins supérieure à cent années-lumière. À proximité, se trouve l'étoile Grenat (µ Cep), une supergéante rouge en fin de vie (la belle étoile rouge brillante en haut à gauche de la capture). La nébuleuse IC1396 est parsemée de nuages de gaz et de poussière sombres et froids. L'un d'eux, connu sous le nom de "Nébuleuse de la trompe de l'éléphant" (nébuleuse brillante située dans la moitié droite de la capture), s'étire sur environ 20 années-lumière et abrite en son sommet deux jeunes étoiles (LkHa 349 et LkHa 349c) qui ont dégagé une petite cavité. La forme particulière de la nébuleuse de la trompe de l'éléphant résulte de son interaction avec son environnement proche, échauffé et soufflé par les vents stellaires. Le centre de IC 1396 présente une large cavité, pauvre en gaz et en poussière, creusée par le rayonnement d'étoiles massives. Cette région est ionisée par le système stellaire binaire HD 206267.
0 point
-
Je vous reviens avec un premier traitement, une simple reprise d'un stack de 2h sur la tête de cheval de cet hiver. Le premier cliché traité entièrement avec SIRIL et GIMP, le second avec Pix. Je pense en faire d'autres versions mais voilà un premier jet. SIRIL+GIMP Pix essai 1
0 point
-
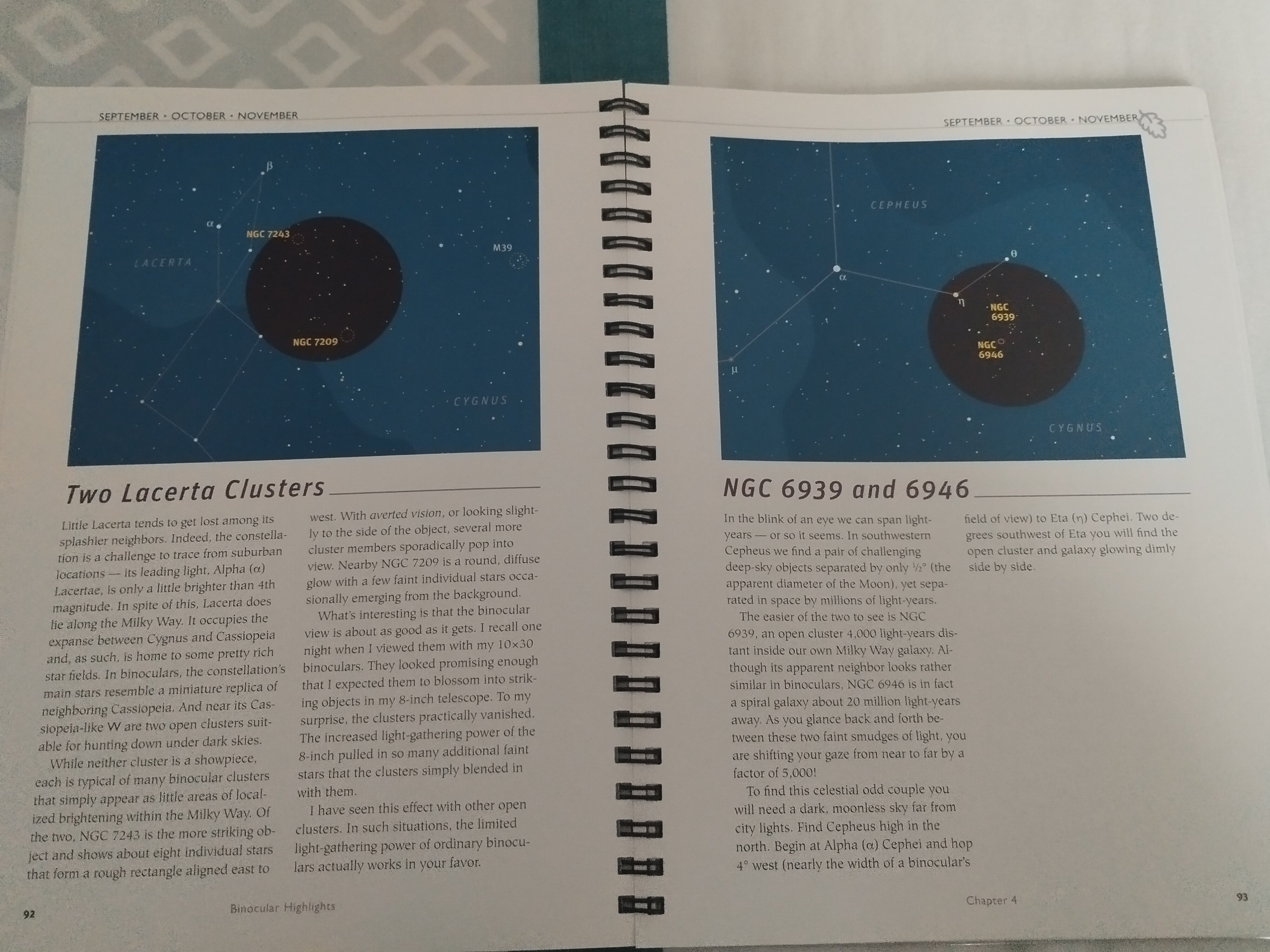
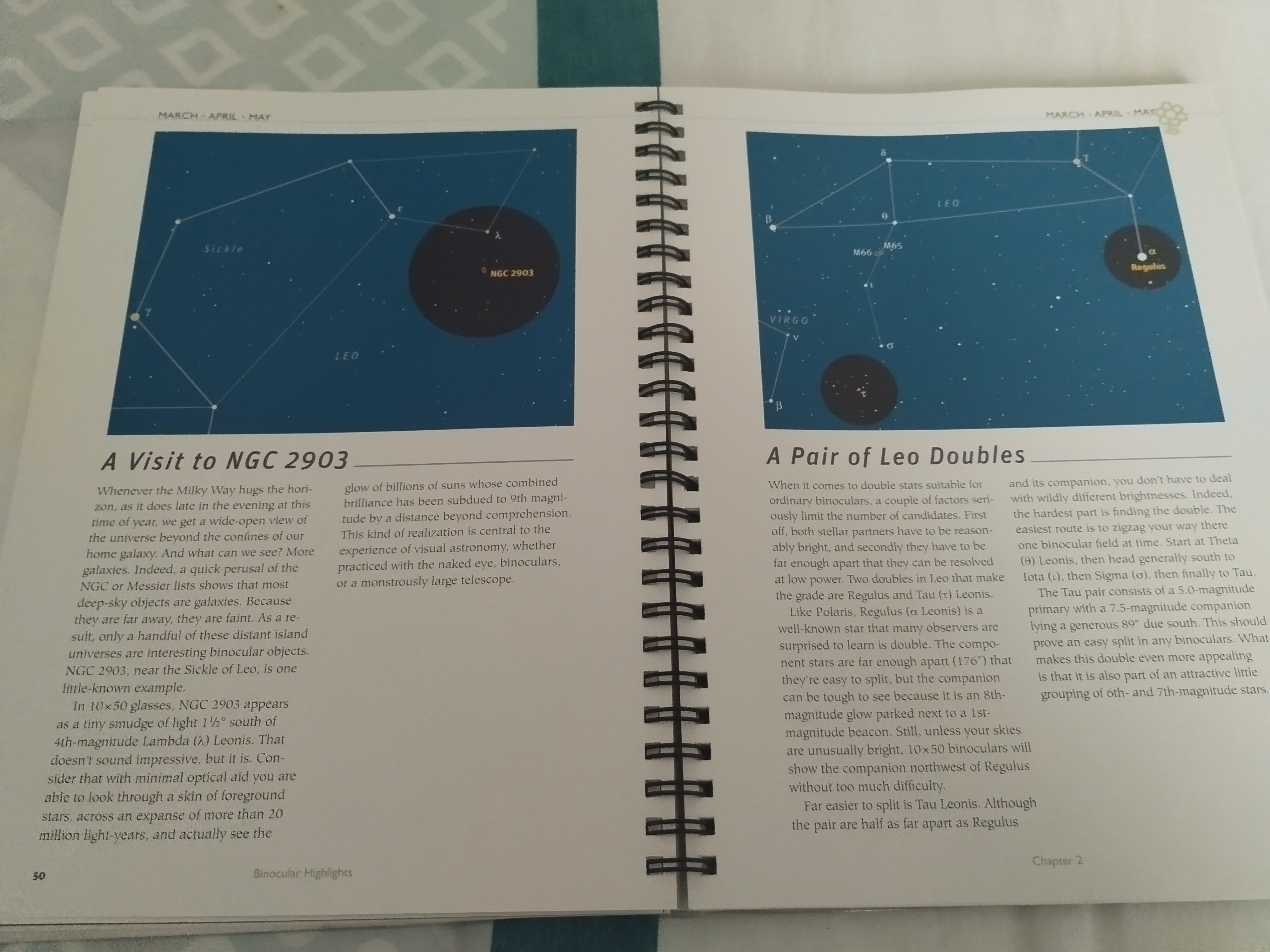
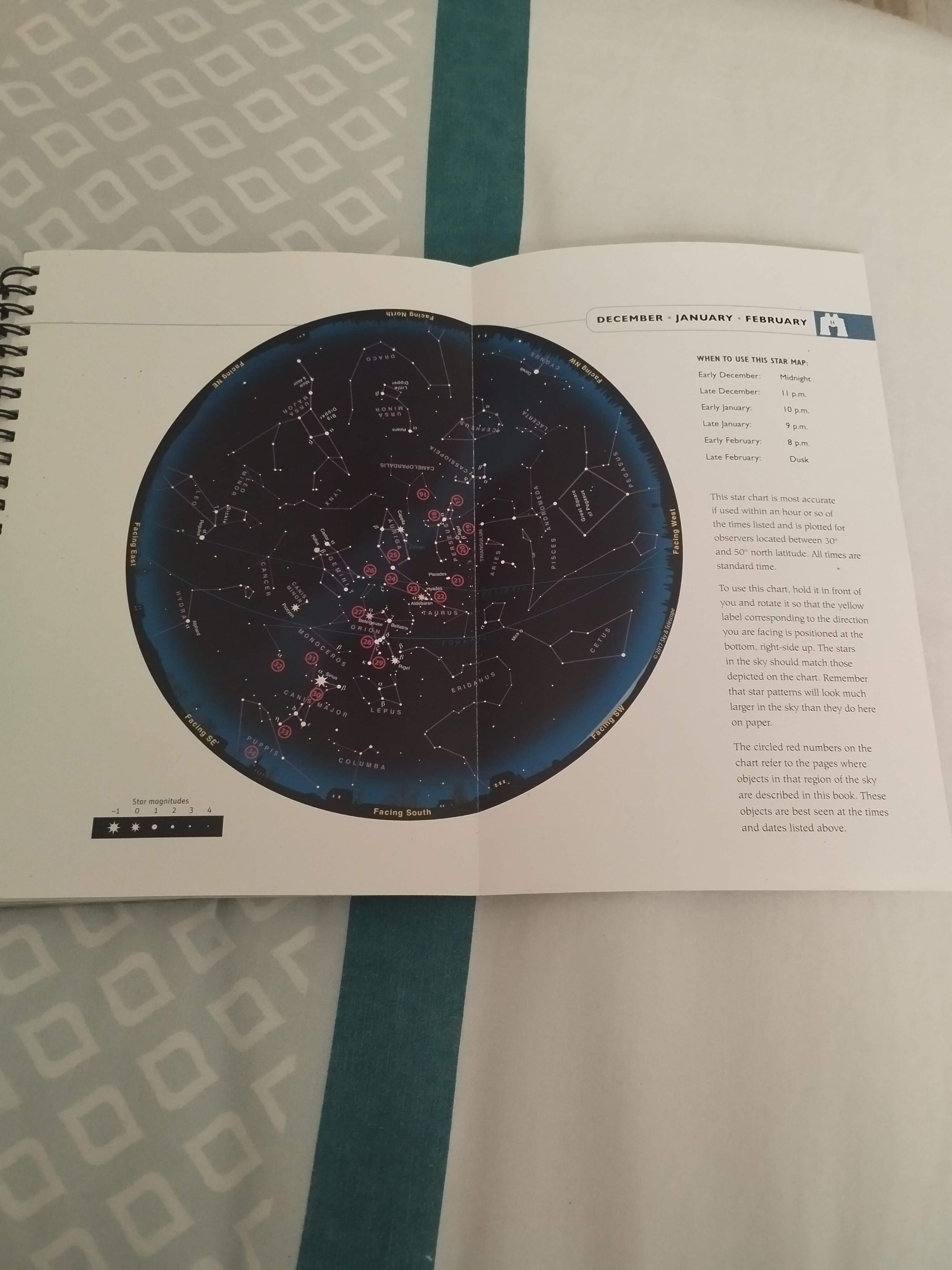
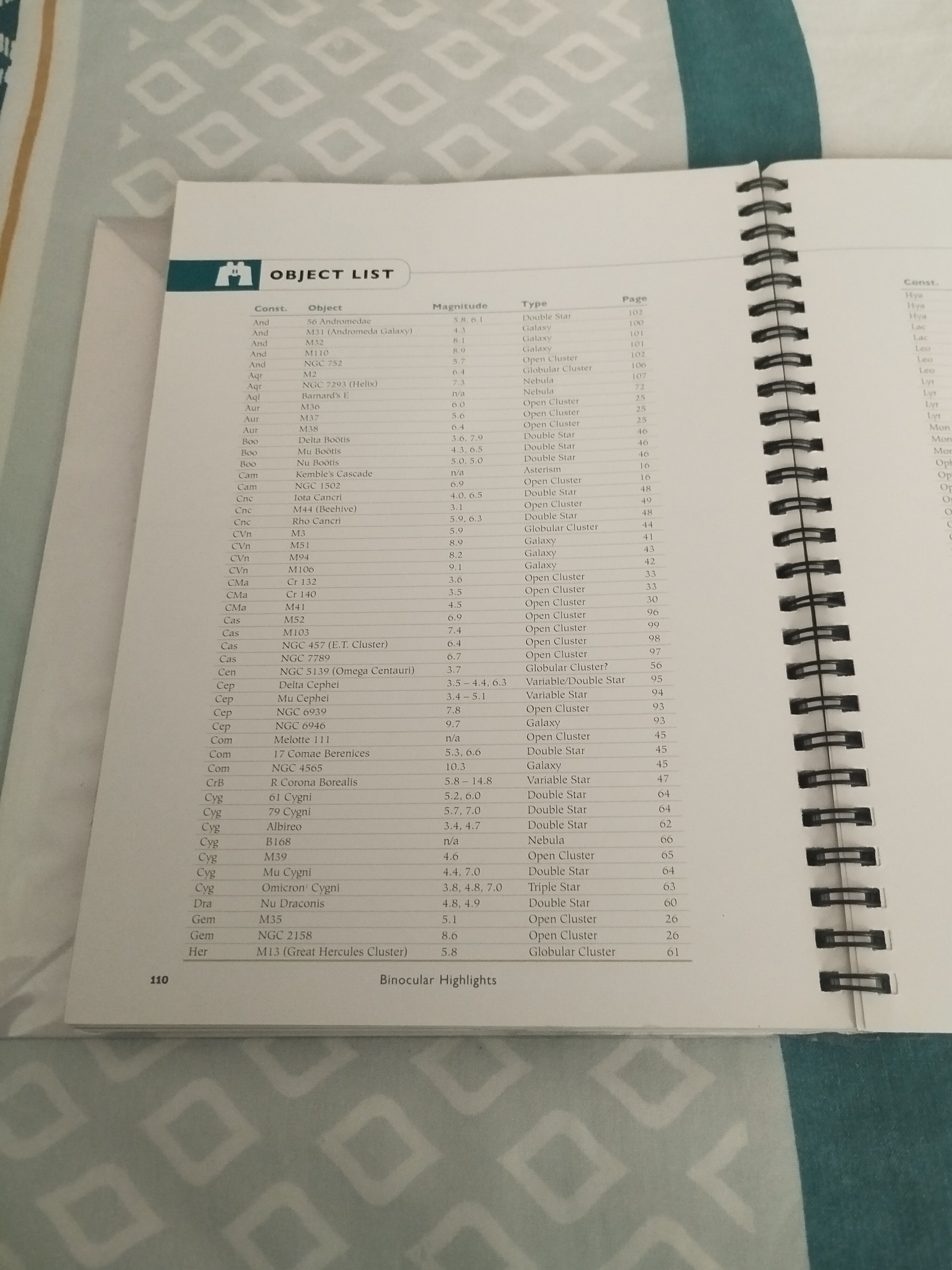
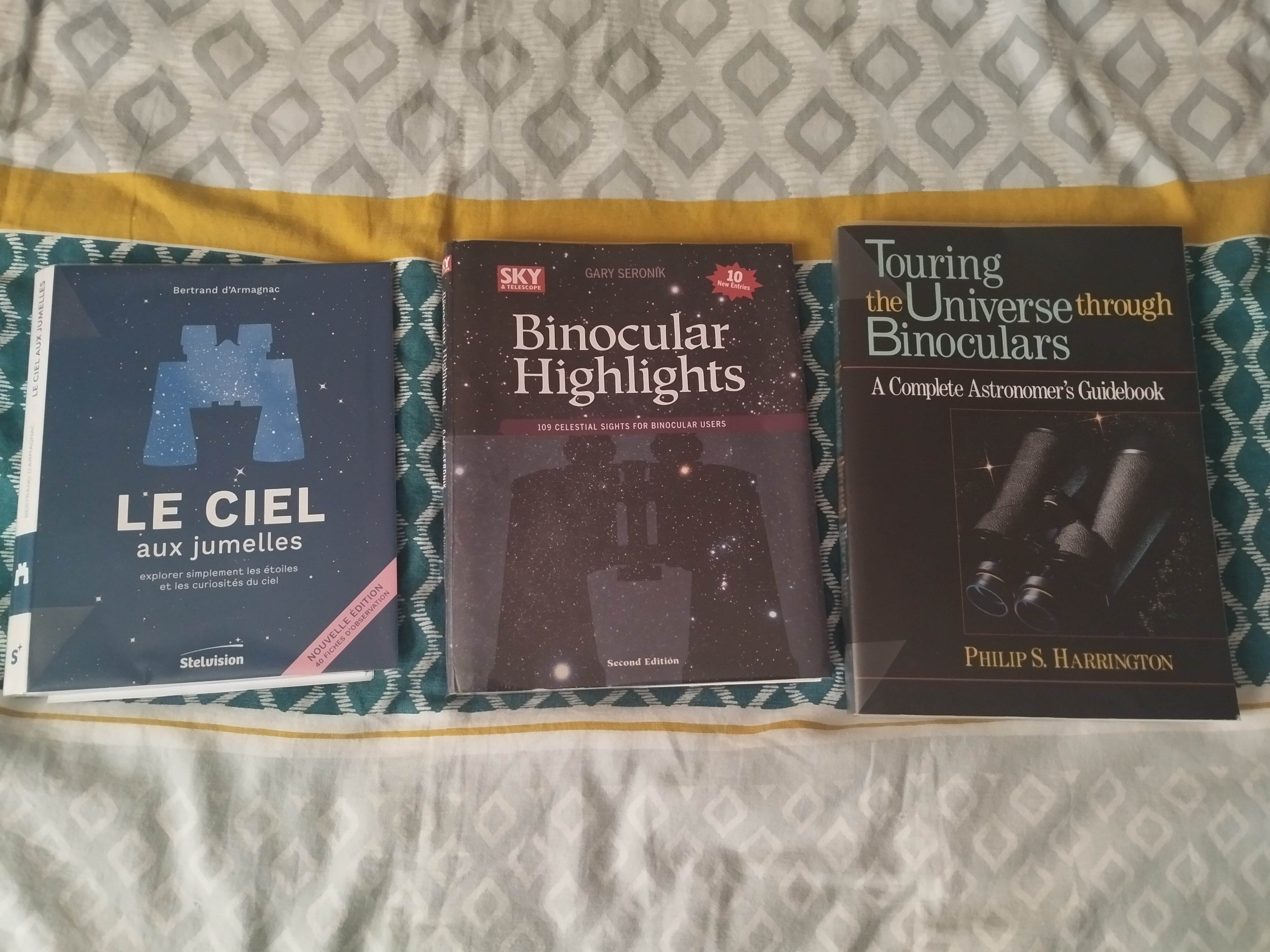
Hello, Un peu frustré également du peu d'ajouts dans cette nouvelle édition j'ai craqué pour une autre merveille du genre, qui complète admirablement bien ce petit recueil de cibles : Alors ok c'est dans la langue de Shakespeare mais au moins là on dépasse la centaine de cibles 🙂 Je pense qu'après s'être fait les dents sur le livre de Bertrand d'Armagnac, celui de Gary Seronik permet d'aller plus loin en intégrant des cibles plus difficiles (quoi que...) et fait surtout la part belle aux étoiles doubles et carbonées. Quelques exemples : J'aime beaucoup les 4 cartes saisonnières qui intègrent les cibles décrites dans le livre Et c'est très agréable de retrouver un index en fin d'ouvrage, qui récapitule les objets avec leurs constellations, types et magnitudes visuelles 👌 Bref, pour qui resterait sur sa faim avec le livre de Stelvision, celui-ci est tout indiqué. De mon côté, il comble très bien l'écart entre le ciel au jumelles et le Touring the Universe Through Binoculars de Philip Harrington, qui pousse très loin l'observation aux jumelles pour les plus téméraires 😁
0 point
-
Je t'avais prévenu😂
0 point
-
Ah je m’attendais à NGC 5128, de l’hémisphère sud, qui s’appelle aussi hamburger…0 point
-
Bonjour, Une petite série, avec plus ou moins d'élégance
0 point
-
belle capture !! Ca fait pas mal de temps que je l'ai pas vu la lune par ici -__-0 point
-
Belle image ! Elle est moins détaillée qu'avec un gros diamètre, c'est normal, mais je la trouve moins détaillée que tes autres captures avec ce setup. Je lui trouve un coté lisse. Alors c'est peut être le combo setup + cible qui fait ça. Je suppose que ton traitement est identique ?0 point
-
C'est Joli Seb😊 Mais beaucoup moins détaillé qu'avec un gros diamètre. a+ Serge0 point
-
Il ne faudra pas oublier le in(gradient) correction ou mayonnaise saturation selon le goût de chacun. Et pour les oignons 3 couleurs (rouge, blanc, jaune) : cliquer sur OIII0 point
-
Ca y est... Tu m'as inspiré... Je fais faire une quiche ! (C'est pas une blague) 😂0 point
-
Le Burger de l'Espace ça sonne bien.0 point
-
Pas mal du tout ! Tu peux ouvrir une franchise0 point
-
Trop balaise 💪....merci beaucoup pour ce tuto, et félicitation pour l'image finale... ça claque.... ça claque grave 😉0 point
-
Ah le voilà enfin ! Mieux que chez Burger King !0 point
-
Pour la nième fois même si c'est très intéressant ça ne prouve rien. Le geipan ne fait que du recensement, du criblage et il n'est pas capable de faire des analyses au delà des réalités de la physique... Estimer distance et vitesse a partir d'un seul point de vue est impossible. il faut 2 zones d'observations a distance connue pour faire une triangulation. C'est d'ailleurs comme ça que fonctionne le réseau fripon qui scanne toute lumière anormale dans le ciel nocturne (pour la recherche de météores mais ils voient aussi passer tout le reste, avions en approche, flash de satellites...) sans trouver le moindre vaisseaux néptuniens à ce jour sur de nombreux pays d'europe... Il y a des choses très curieuses et inexpliquées mais se rabattre sur la première explication sans la moindre preuve est abusé. On pourrait aussi dire que c'est une nouvelle espèce d'oiseau bioluminescent supersonique encore inconnue. Et forcément on le connait pas par ce qu'il est inconnu. Alors comment départager les "extratéristes", des oiseauistes, ou éventuellement les futuristes qui reviennent du futur visiter notre présent (film LOOPER vs indépendanceday/mars attack vs avatar) ? Peut ont affirmer qu'une de ces 3 théories est la bonne sans apporter la moindre preuve concrète? je dis bien PREUVE pas simplement des éléments qui laissent penser que peut être.... Bref arrêtez de dire c'est mystérieux donc c'est une preuve "ils existent"... Admettez qu'on en sait absolument rien... même si peut être, éventuellement, certaines choses.... mais peut être pas du tout 😅 En plus on ne s'intéresse qu'à ce qui se passe en l'air alors qu'on ne connait qu'un infime pourcentage des fonds marins... Renseignez vous sur les disparitions de navires et sous marins et vous allez tout d'un coup imaginer qu'ils se cachent forcément sous l'eau au vu des événements et de notre méconnaissance alors que personne n'en parle actuellement...0 point
-
Hello, Passage obligé dans le Lion, avec le fameux trio de galaxies. Pour aujourd'hui je vous présente le duo M65/M66, demain ce sera le Hamburger. Le triplet du Lion (aussi appelé le groupe de M66) est un petit groupe de galaxies situé à environ 35 millions d'années-lumière dans la constellation du Lion. Cet amas regroupe les galaxies spirales M65, M66, et NGC 3628 , communément appelée "la galaxie du Hamburger". M65 (NGC 3623) est une galaxie spirale située dans la constellation du Lion. Elle a été découverte par l'astronome français Charles Messier en 1780. M66 (NGC 3627) est une galaxie spirale intermédiaire située dans la constellation du Lion. NGC 3627 a été découverte par l'astronome français Charles Messier en 1780. Le triplet du Lion (aussi appelé le groupe de M66) est un petit groupe de galaxies situé à environ 35 millions d'années-lumière dans la constellation du Lion. Cet amas regroupe les galaxies spirales M65, M66, et NGC 3628 , communément appelée "la galaxie du Hamburger". Lunette Skywatcher 80ED (80/600) + réducteur 0.8x @ 479mm Caméra planétaire Player One Neptune-664c + filtre Player One IRcut Anti-halos Monture HEQ5 kit courroie Rowan Autoguidage via lunette guide 60/270, Asi290mm / PHD2 Acquisition NINA 101 x 30s Gain 180 Traitement Siril, Pixinsight, Photolab 6. une brute de 30s:
0 point
-
Bien jolie prise, très esthétique cette galaxie ! 👍👍🙂0 point
-
Voilà une façon de partager un projet remarquable. Compétences Mr indique partir de zéro mais signale qu'il faut être quelque peu pugnace (pas étonnant). Néanmoins il me semble très méthodique et donc bien organisé pour aboutir à ce projet avec toutes les modifs apportées. Capacité d'analyse. Descriptif Mr détaille très largement le projet avec les limitations de chaque option. Points critiques Mr en signale plusieurs. Et signale par ex. qu'il vaut mieux partir en PETG voire renforcé aux fibres carbone Générosité & communication Mr donne tout Budget Montant pas trop élevé (si on ne compte pas l'imprimante 😄😄) Moi je rajoute que Mr doit gérer des projets dans son job, en tout cas il a ces compétences. Donc attention touriste s'abstenir Moi j'aime +100 Je me pose la question d'adaptation à L'ASIAIR, le logiciel Ekos sur un Raspberry PI 5 . Donc probablement adaptation à INDI bravo pour tout NOTA : attention le CAA de ZWO ne fonctionne que dans l'environnement ASIAIR.0 point
-
Merci. Alors d'une part je garde toujours une cible a faire éloignée a plus de 90° de la lune sachant que c'est le moment où le ciel sera dégagé apres, a f/7 et en mono, les images sont sans doute moins sujettes au fdc sur les couches couleur. jai quand meme remarquer, sur mon meme site, pour des regions de ciel proches mais avec plus un f/d plus bas et surtout une caméra couleur...les images sont plus difficiles a traiter. C'est pour ça que jai repris la minicam pour la sqa55 et vais revendre la 26C Suis vraiment moins a l'aise avec...0 point
-
Le principal est d'être à l'aise avec sa façon de faire, surtout quand ça marche ! M'est tout de même d'avis que tu peux optimiser cela, pour avoir une séquence avancée que tu charges, et dans laquelle tu charges la cible (de la même manière que dans le séquenceur simple). Concernant le guidage par exemple, en plus des instructions relatives au plugin PHD2 de NINA (qui permettent de faire des choses sympa, notamment arrêter une pose quand le guidage atteint des mauvaises valeurs), tu as aussi un trigger "Centrer après la dérive", qui prend 2 paramètres : la distance maximale par rapport au centre de la cible envoyé dans le séquenceur, et le nombre de poses avant évaluation. Il permet de recentrer en cas de dithering trop important (quand c'est au hasard, ça peut pousser dans le même sens plusieurs fois de suite), en cas de suivi qui a merdé, etc. Il y a vraiment possibilité de gérer beaucoup de cas de figure, et de se simplifier la vie pour la préparation de soirée. Mais, je le répète : rien de mieux qu'avoir sa façon de travailler, surtout quand ça fonctionne
0 point
-
Oui je connais ce site, il est mentionné dans les plans paramétrables en question 😉 Mais je vais essayer de trouver une solution moi-même. Même si je dois racheter une plaque de 10 mm (environ 40€), ça me coûtera bien moins cher que de leur donner : Environ 60€ pour découper les 20 m linéaires de découpes (un peu moins de 3€ le mètre). Pour le matériau, il faut en gros 2 plaques de 600x900, soit 6 plaques de 600x300 (les plus grandes qu'ils affichent sur leur site) à 5.94€ pièce soit environ 36€ au total. Et là je ne suis qu'en 5 mm car ils n'affichent pas le 10 mm dans leur contreplaqué de peuplier. Donc en réalité ça doit peut-être même être plus cher, sûrement autour de 50€. Il faut aussi payer à la seconde d'utilisation du laser (2 centimes la seconde) et ils indiquent que ça ne représente en général pas plus de 15% du total. En prenant 10% pour être gentil, ça rajoute une dizaine d'euros. Soit un total de 110/120€, donc 3 fois plus cher. Et avec ça, je n'ai aucun rab pour refaire des pièces si besoin (je foire une pièce pour une raison quelconque) ou envie (je veux changer la forme des haches). Je serais parti sur la méthode "à l'ancienne" et ça m'aurait gonflé, pourquoi pas pour gagner du temps. Mais là en ayant déjà acheté le matériau, adhéré au fablab et fait la moitié des pièces sans problème, ça n'a pas grand intérêt. Je garde quand même au cas où je n'y arrive vraiment pas malgré toutes les options sur la table, mais j'espère ne pas en arriver là car ma patience a des limites 😅 En attendant de pouvoir avancer "pour de vrai" (faute de dispo principalement), je suis en train de tout modéliser paramétriquement sur OnShape. Ça m'aide à comprendre certains aspects, à me familiariser avec ce logiciel pour ensuite faire de l'impression 3D et surtout éventuellement, si j'arrive à faire tout ce que je veux proprement, à partager tous les modèles à la communauté car ça pourrait aider des personnes. A suivre !0 point
-
Top il ressort bien déjà ! Avec un beau satellite. Curieux hasard, la même nuit avec le même setup quand le jour pointait son nez avant de remballer j'ai testé le croissant aussi, une brute de 180 secondes. Plein de choses aussi là bas, je pense tenter ce coin bientôt.
0 point
-
Organisation simple, chacun a son rôle. Mais elle ne peut pas fonctionner avec tout le monde, si chacun aime traiter 😊 Je vous souhaite de vite régler les différents problèmes rencontrés ! Et vivement les future photos (au passage, superbe les 2 photos d'aurores boréales postées ce jour !)0 point
-
Zut. J'ai glissé aussi. C'est à cause de la pluie. OnTheMoonAgainWhenItIsFuckingTheWeatherOfTheLordThenBuyStuffYouDontNeed. Whatever.0 point
-
@Goofy Je me sens moins seul maintenant... Je pensais être le seul à lutter contre les Seestar ! 🙂0 point
-
Un petit débrief perso des NAV. Au final, 2 nuits et (presque) 0 photos 😂 Bienvenue dans le récit plein de rebondissement d'un gars qui a décidé d'en chier un maximum! Nuit 1 Petite recollim à l'OCAL. Ca me prends 2 minutes max.... Puis je fais ma MES. J'ai réussi à avoir 1.8' d'erreur en le faisant au viseur polaire.... Et à partir de là, c'est parti en vrille. 😅 Cà a commencé avec l'installation de mon setup: au moment de connecter mes caméras, rien. Nada, walou, quetchi. J'ai trifouillé un peu, et au final j'ai déserré un peu les circlips qui attachait les câble USB, mais surtout j'ai vu que mon répéteur USB avait un "in" et un "out", que j'ai inversé. Un bon 30 minutes de perdues. Point 1: Mettre le input du répéteur côté PC. J'ai ensuite fait tout mon paramétrage PHD2. Je lance l'autoguidage, et tout part en vrille direct! C'est au bout de quelques minutes, que je me rends compte que j'ai encore la vitesse sidérale à 16x sur la raquette, alors qu'elle est à 0.1x sur PHD2... Point 2: ne pas oublier de remettre sa vitesse sidérale à x0.1 après pointage. Malgré plusieurs modifications, je n'ai jamais pu avoir la valeur RA OSC au dessus de 20. Bon, pas grave... J'arrive à avoir entre 0.74" et 1.1" RMS. Sauf qu'à un moment, ma trace DEC partait vers les 4", même si il me disait que le RMS restait vers 1". Je comprenais pas... Et comme je savais pas à quel point ma MES était bonne à ce moment, j'ai tenté le drift align. L'enfer. La création des courbes est lente pour avoir assez d'échantillon, et donc la vrai erreur d'alignement en az puis en alt. Et il faut trouver dans quelle sens manipuler les vis, de combien... Quand je réalise de quel côté tourner les vis, je dois attendre 3/4 min pour avoir une nouvelle mesure, puis refaire ma correction, puis ré-attendre 3/4 min, etc... C'EST LONG!! J'ai découvert une fois couché dans la tente, bien plus tard, que j'utilisais mal l'outil... Mais j'ai fini avec une erreur d'alignement de 0.8'. Point 3: Utiliser le cercle violet lors du drift align, pas que les courbes. (placer l'étoile guide dessus pendant la phase d'ajustement). Je vois malgré tout que j'ai TOUJOURS le même problème. Et là, je réalise que c'est quand je passe le méridien. Je pense au sujet que j'avais fait ici sur le retournement de méridien, où l'on m'avait dit: "il faut aller dans le menu de PHD2 Outil->Calibration->Permuter les calibrations. Mais çà merde toujours... Pas grave, je décide de rester côté EST pour ce soir. Tout se passait enfin nickel, j'ai donc décider de shooter... Je commence à faire le focus. Enfin j'essaye... JE PEUX PAS! Ma nouvelle bague de PO auto-centreuse est trop épaisse. Je suis gavé. On tente d'avancer le miroir primaire pour corriger le problème avec @macfly51, mais je sens quasiment plus la résistance des ressorts et je préfère donc ne pas aller plus loin. Je me rappelle qu'il y a un Quattro à côté. Je vais voir son propriétaire, qui a la bague d'origine qu'il me prêtera donc gentiment (si tu es là, merci!) pour le week-end. Je teste avec, je peux enfin faire le focus. Mais tout est dé-collimaté. Je préfère donc aller me coucher. Point 4: calculer sa course de mise au point. Avec la bague d'origine, il me reste 3mm, et le tube du focuser rentre de beaucoup dans le tube du télescope. Je réfléchis à changer de correcteur de coma pour avoir plus de course et remettre ma bague auto-centreuse. Nuit 2 Nouvelle collimation à l'OCAL. Ma MES est bonne, donc je touche pas. Ce soir normalement, je shoot vite! Enfin çà, c'est ce que j'espérais! 😂 Je décide de faire la nébuleuse de l'Amérique du Nord, voir si mon APN arrive à capter du signal. Sauf que dès que je pointe vers le nord, l'autoguidage part en couille. Comme il partait la veille quand je passais à l'ouest du méridien. Je décide donc de tester de nouveau ce "permuter les calibrations". Mais c'est encore pire avec. Je regarde donc la doc, pour me rendre compte que ce menu bascule entre les 2 dernières calibrations réalisées! J'ai cherché comme un con pendant une éternité... Pour voir la petite boite "auto" au niveau des paramètres de guidage DEC sur la fenêtre principale, qui propose aussi Nord et Sud. Je reste dessus avec la souris pour avoir l'info-bulle, et ohhh surprise: elle permet de choisir la direction de guidage du DEC. Je tente, et miracle! Ca marche. Point 5: utiliser la petite boite de direction de guidage, indispensable quand tu n'as pas de GOTO (ou qu'il ne donne pas d'info Pear Side). Et justement, le fait de pas avoir de GOTO va faire ma fin de soirée... Déjà je fais ma MAP avec mon masque de Bahtinov, et je galère. Impossible de ne pas avoir une tâche de diffraction qui m'empêche de voir où mes aigrettes se croisent. J'essaye de changer les ISO, l'expo... Rien de mieux. Et l'angle est très étroit, ce qui aide pas à être précis. Tant pis, je fais avec. Et je décide de pointer la nébuleuse de l'Amérique du Nord avec mon viseur point rouge. Je pense être bon, je prends une photo... Et je vois aucune nébulosité. Tant pis, je dois être à côté, je vais faire du plate solving pour voir de combien corriger! Avec mon APN Fuji, çà veut dire déjà convertir le fichier. Siril n'arrive toujours pas à intégrer Astrometry.net sur mon PC, donc je décide de passer par Ain Imager (d'Indigo). Et là, il propose pas non plus de faire le solving... Alors que PUTAIN, j'avais testé chez moi!!!! J'ai compris qu'il refusait si je n'avais pas de serveur Indigo de lancé. Ok, maintenant il propose... Je lance... Aucun résultat. Bordel... Je tente ASTAP. Il demande les coordonnées, il sait pas faire du blind. Bon... Je peux pas faire avec EKOS, car il demande de faire l'acquisition en FITS, et propose pas de charger une image. Je tente donc avec le solver intégré à Siril, en mettant "à peu prêt" la position où je pointe. Ca fonctionne... Une fois, puis plus du tout. Il faut que je shoot, puis que j'aille sur Siril, que j'ouvre mon RAF pour le dématricer, qu'avec Stellarium j'estime mes coordonnées, que je les rentre dans Siril pour avoir les vrais coordonnées, puis que je corrige un peu sans savoir de combien me déplacer. L'ENFER. Point 6: avoir un GOTO bordel... Ou une caméra qui sort des FITS, pour aligner directement avec EKOS (ou NINA). Pas un putain d'APN avec une matrice de 9x9! En rentrant chez moi, je me suis rendu compte qu'en fait, j'étais dessus... Sauf que le signal est tellement faible même en ISO 3200 et 2 min d'expo que j'avais rien vu. Et oui, car j'avais baissé la luminosité de mon écran au maximum! Point 7: remettre la luminosité de l'écran au max, quand on veut vérifier si l'on est bien sur son objet. J'en ai marre! Je décide de faire un objet que je sais pointer facilement: les voiles, qui sont hautes désormais. Je sais que je dois refaire ma MAP qui s'est déplacé avec la différence de température. Et là, je retrouve la galère précédente avec mon masque de Bahtinov. Je réfléchis... Et je décide de l'orienter autrement. Surprise, l'angle entre les aigrettes repères s'ouvre, et je peux enfin être précis: Point 7: ne pas hésiter à tourner son masque... (C'est peut être due à mon tilt de PO..?) Et au moment où je me mets dessus, @Astroced69 et @macfly51 me disent: "c'est mort... Tu n'as pas vu que çà c'est voilé, et que c'est de pire en pire?" 😭 On parle avec Cédric, qui décide de jeter un coup d 'oeil sur le collage de mon secondaire. Et effectivement, il voit de suite qu'il est mal collé. Je suis bon pour le recoller... Point 8: quand tu récupère un télescope, vérifie le collage du miroir secondaire sur son support... J'ai donc debrief chaque fin de soir, en écrivant les points d'attention ou les améliorations à faire sur papier. Je restitue donc ici tout çà, et je finis donc avec les autres points que j'ai marqué: Point 9: faire une synchro de l'heure entre l'APN et le PC... Ca permet de faire matcher les logs PHD2 avec ces images, pour les filtrer (perte de guidage). Point 10: mettre le train optique dans l'axe de la monture. Point 11: ne pas arrêter une acquisition avec son APN, du moins si c'est un FUJI (çà crash et déconnecte tous les appareils. Je dois l'éteindre, éteindre le serveur INDI, puis tout relancer). Point 12: vérifier que le backlash compensation n'a pas été désactivé après une calibration. Bref, c'est un semi-échec. Je savais que j'allais en chier... J'étais parti dans l'optique que ces NAV serait là pour résoudre mes problèmes en premier. J'avais quand même espérer avoir le temps de shooter... Mais c'est aussi une réussite, car j'ai fait le plein d'expérience.0 point
-
Ha oui je compatis grandement. Les non initiés à l'astronomie en général et à l'astrophotographie en particulier n'imaginent pas à combien notre passion est compliquée et difficile. Car pour arriver à réaliser une photo, la courbe d'apprentissage est énorme. Et même après des années d'expériences, de galères en tous genres, on est tout le temps confronté à de nouveaux défis. On finit par les surmonter, mais bon dieu, une fois qu'on arrive à ce que tout fonctionne enfin, là on savoure, on a un petit smile intérieur qui se dessine, et on finit par mettre de côté tous ces événements négatifs, mais qui font avancer. Ils devraient mettre une petite phrase d'avertissement au début des notices des télescopes et autres caméras astro...du style "le matériel que vous venez d'acquérir va vous en faire baver parfois, voir souvent, mais persévérez et vous serez récompensé". En tous cas, avec tout ce qui t'es arrivé, tu seras encore plus fort 🙏 Que la Force soit avec toi !0 point
-
Joli projet 👍 je te souhaite d'arriver au bout 😉 😊
0 point
-
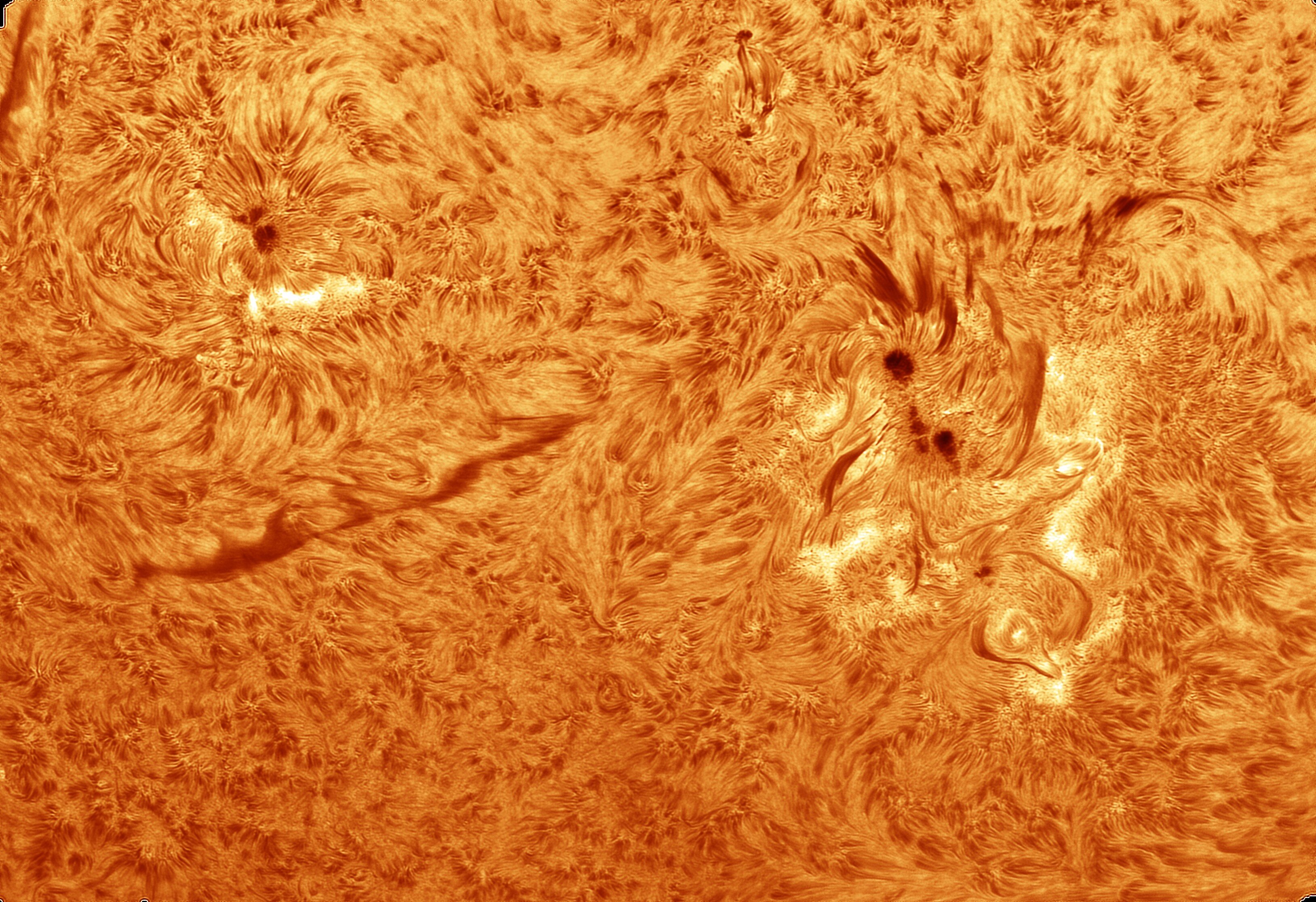
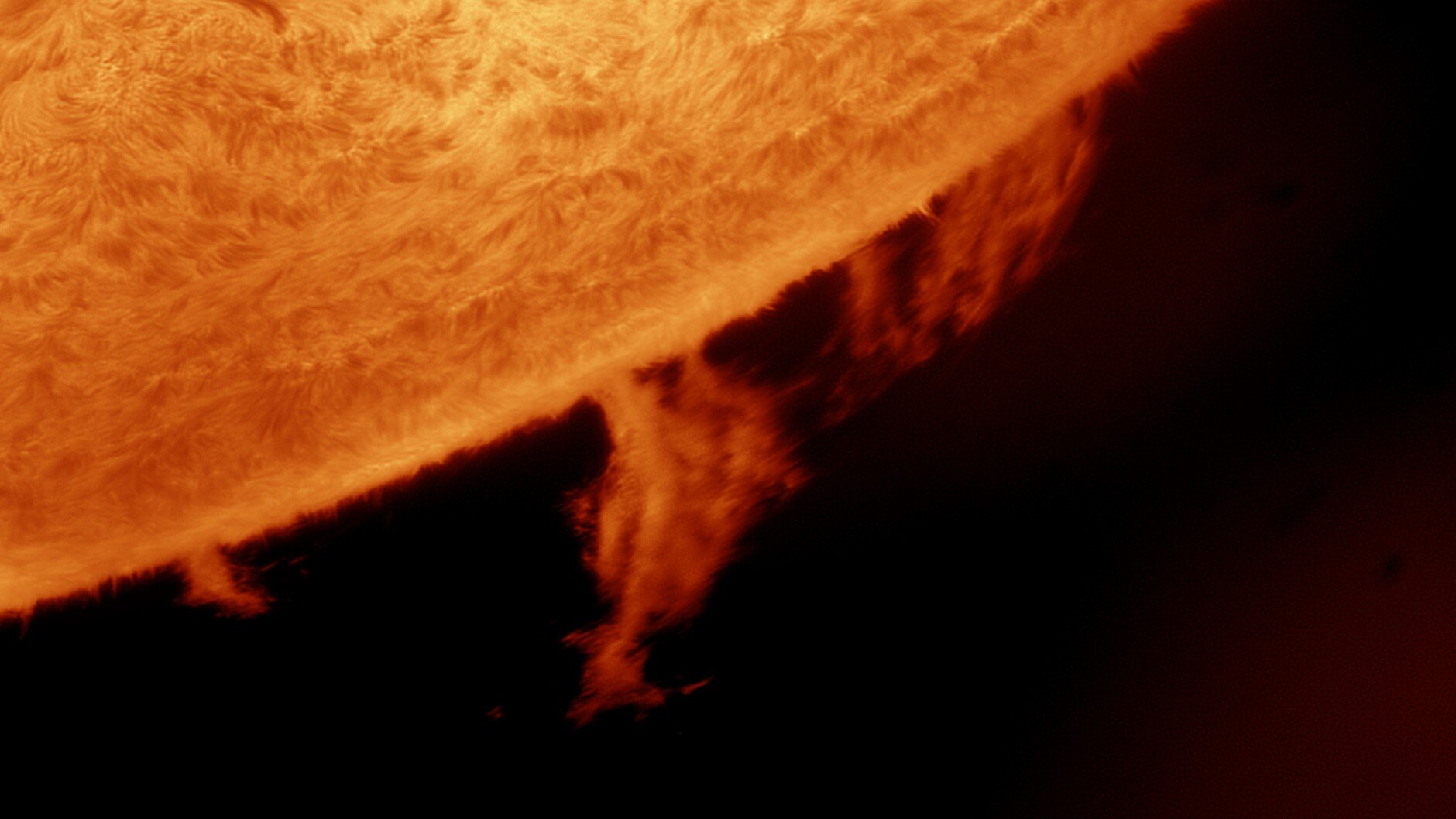
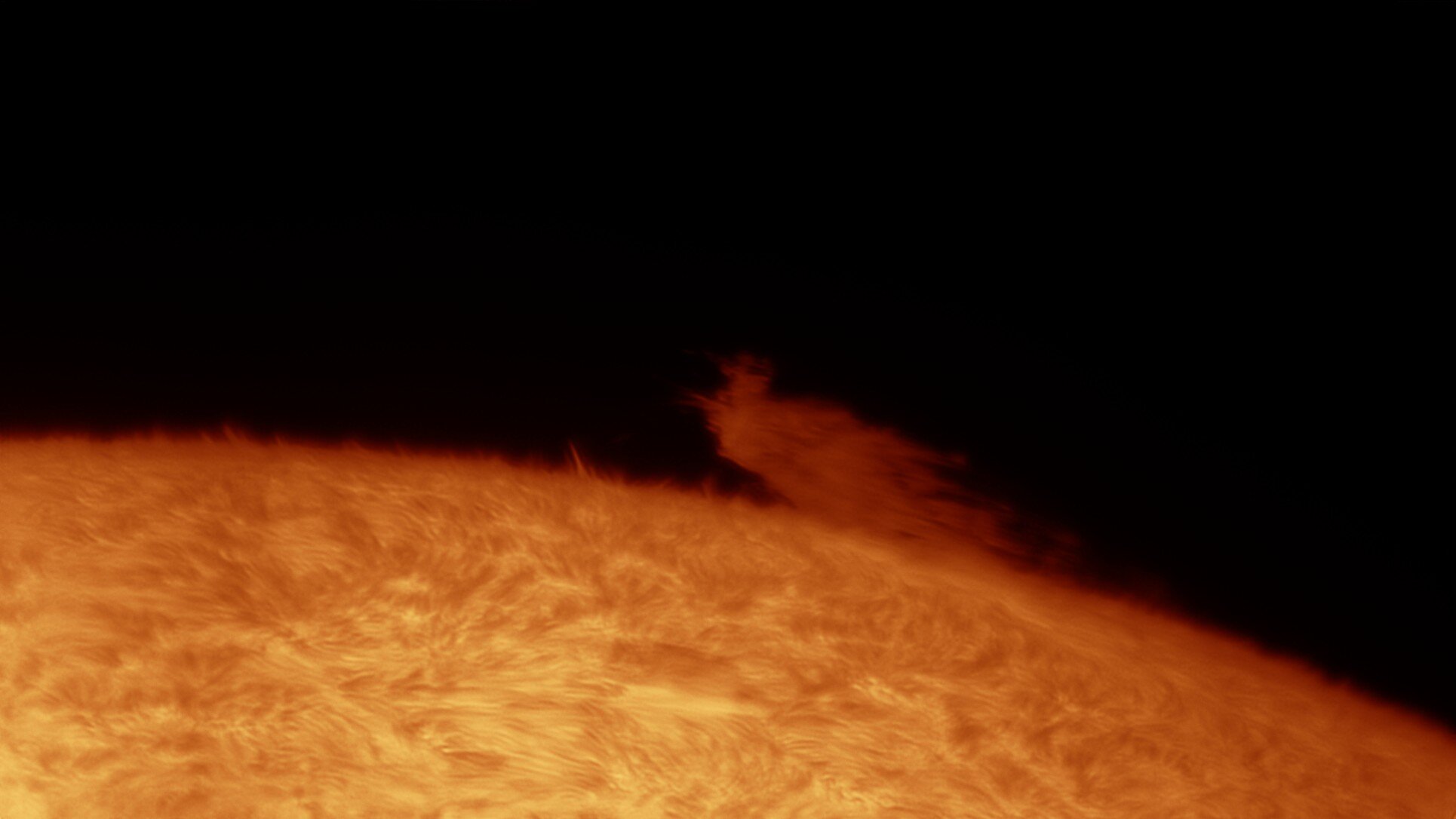
Session du 30 mai 2025 dans les Pyrénées. Conditions : Seeing 5/10 Setup utilisé : Telescope : TS-130/910 Filtre ERF 1.25" Montage double stack avec Daystar Chromosphere et PST Caméra : Apollo 428M en BIN 1
0 point
-
Merci effectivement. Cet exemple montre que notre sujet de forum peut être enrichissant, pour peu que l'on sorte des à priori, des affirmations non démontrées et des postures. Michel, simplement en travaillant et en cherchant à approfondir, nous a rendu service.0 point
-
Excellent ! C'est bien ce que je croyais avoir vu en lançant la vidéo en mode très lent... Mais je n'ai pas donné suite. Ces "jeux" de lumière me rappellent mon désappointement en Vendée, au cours des années 94-95, lorsque venant de recevoir mon chouette Arcane 205, j'ai eu la surprise de découvrir, le soir, les faisceaux laser imbéciles d'une boite de nuit choletaise... Et je n'avais pas de mouchoir ( de Cholet ) pour Merci Michel pour cet éclaircissement. Bon ciel à toi.0 point
-
il y a clairement du potentiel ... mais waou !! tu traites fort, ça déchire les yeux 😆0 point
-
Super impressionant. Le contraste est presque trop fort en fait. il faudrait adoucir l'image. Cette lunette marche bien.0 point
-
Et les subtils spicules, ils sont pas mis en évidence par le contraste et le piqué exceptionnels de cet instrument? c'est bête, on passe sur ce qui fait le charme du halpha, la fine épaisseur entre la photosphère et la première couche de l'atmosphère solaire. ballot pour un filtre supposé sublimer ces 6000km....0 point





































.thumb.jpg.9266a13fd122c88fc2dae062c02e8906.jpg)























Ce classement est défini par rapport à Paris/GMT+02:00